No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
No version for distro github. Known supported distros are highlighted in the buttons above.

Package Summary
| Tags | No category tags. |
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | A ROS driver node for VSSP protocol compliant HOKUYO 3D LIDARs |
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-02-19 |
| Dev Status | DEVELOPED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
ROS driver node for HOKUYO 3D LIDARs
Additional Links
No additional links.
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
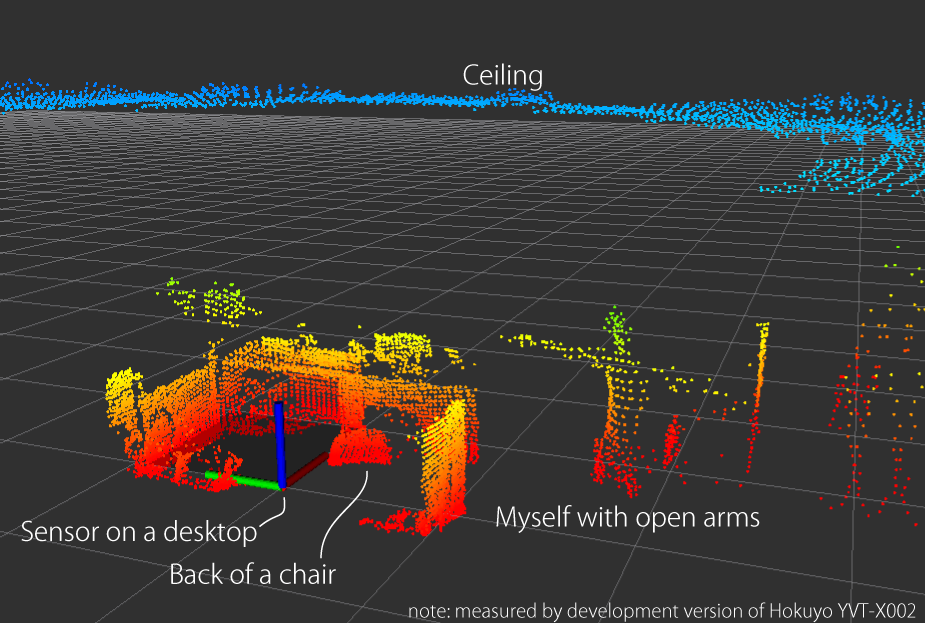
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
CHANGELOG
Changelog for package hokuyo3d
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug (#30)
- Fix connection start timing
(#29)
- Suppress [Transmission timeout]{.title-ref} error from the sensor
- Support auto reset setting
(#27)
- Support auto reset setting
- Don't send auto reset command if the parameter is not given
- Support vertical interlace added on VSSP2.1 (#25)
- Fix local variable naming style (#26)
- Use timer instead of polling (#23)
- Remove needless semicolons (#22)
- Fix CI bot setting (#24)
- Fix aux data factors. (#18)
- Add a sample launch file to publish frames. (#17)
- Fix socket read buffer size. (#14)
- Add const attribute to constant things. (#16)
- Fix naming style of local variables. (#15)
- Fix coding styles.
(#12)
- fix coding rules
- fix naming styles
- add roslint test
- Fix mag frame_id. (#13)
- Change IMU coordinate frame. (#10)
- Add build test on Travis. (#11)
- Contributors: Atsushi Watanabe
0.1.1 (2016-09-15)
- updates e-mail address of the author
- adds error-message packet handling
- Merge branch 'lgerardSRI-master'
- Install the hokuyo3d executable
- Contributors: Atsushi Watanabe, Leonard Gerard
0.1.0 (2015-04-24)
- direct PointCloud2 message encoding
- adds list of contributors
- adds feature to publish PointCloud2 message "~/hokuyo_cloud" and "~/hokuyo_cloud2" are published on demand. Added pursuant to yukkysaito's request.
- adds parameter to set data output cycle ~output_cycle (string, default: field) Sets output timing to end of frame, field or line. Added pursuant to yukkysaito's request.
- Add invalid range parameter This commit is modified for merging by at-wat. Parameter name invalid_range was changed to range_min.
- fixes a bug in which output data doesn't have all points Fixed pursuant to yukkysaito's report.
- code refactoring
- skips invalid data without 'VSSP' mark
- stops data stream correctly before exit
- scales aux data
- estimates real measurement time from timestamp
- receives aux data and publishes Imu and MagneticField message
- add README.md
- Initial commit
- Contributors: Atsushi Watanabe, yukihiro saito
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
No direct system dependencies.
Dependant Packages
No known dependants.
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged hokuyo3d at Robotics Stack Exchange
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
Package Summary
| Tags | No category tags. |
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | A ROS driver node for VSSP protocol compliant HOKUYO 3D LIDARs |
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-02-19 |
| Dev Status | DEVELOPED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
ROS driver node for HOKUYO 3D LIDARs
Additional Links
No additional links.
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
CHANGELOG
Changelog for package hokuyo3d
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug (#30)
- Fix connection start timing
(#29)
- Suppress [Transmission timeout]{.title-ref} error from the sensor
- Support auto reset setting
(#27)
- Support auto reset setting
- Don't send auto reset command if the parameter is not given
- Support vertical interlace added on VSSP2.1 (#25)
- Fix local variable naming style (#26)
- Use timer instead of polling (#23)
- Remove needless semicolons (#22)
- Fix CI bot setting (#24)
- Fix aux data factors. (#18)
- Add a sample launch file to publish frames. (#17)
- Fix socket read buffer size. (#14)
- Add const attribute to constant things. (#16)
- Fix naming style of local variables. (#15)
- Fix coding styles.
(#12)
- fix coding rules
- fix naming styles
- add roslint test
- Fix mag frame_id. (#13)
- Change IMU coordinate frame. (#10)
- Add build test on Travis. (#11)
- Contributors: Atsushi Watanabe
0.1.1 (2016-09-15)
- updates e-mail address of the author
- adds error-message packet handling
- Merge branch 'lgerardSRI-master'
- Install the hokuyo3d executable
- Contributors: Atsushi Watanabe, Leonard Gerard
0.1.0 (2015-04-24)
- direct PointCloud2 message encoding
- adds list of contributors
- adds feature to publish PointCloud2 message "~/hokuyo_cloud" and "~/hokuyo_cloud2" are published on demand. Added pursuant to yukkysaito's request.
- adds parameter to set data output cycle ~output_cycle (string, default: field) Sets output timing to end of frame, field or line. Added pursuant to yukkysaito's request.
- Add invalid range parameter This commit is modified for merging by at-wat. Parameter name invalid_range was changed to range_min.
- fixes a bug in which output data doesn't have all points Fixed pursuant to yukkysaito's report.
- code refactoring
- skips invalid data without 'VSSP' mark
- stops data stream correctly before exit
- scales aux data
- estimates real measurement time from timestamp
- receives aux data and publishes Imu and MagneticField message
- add README.md
- Initial commit
- Contributors: Atsushi Watanabe, yukihiro saito
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
No direct system dependencies.
Dependant Packages
No known dependants.
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.