No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
ros2_rs_pcl package from ros2_rs_pcl reporos2_rs_pcl |
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | MIT license |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 sample of Realsense with PCL library |
| Checkout URI | https://github.com/tasada038/ros2_rs_pcl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-05-22 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | realsense pcl-library ros2 |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
ros2_rs_pcl_test
Additional Links
No additional links.
Maintainers
- Takumi Asada
Authors
No additional authors.
ros2_rs_pcl
ROS 2 sample of Realsense with PCL library
Supported ROS 2 distributions
・Foxy (master)
・Humble (humble-devel is in development)
Requirements
- Laptop PC
- Ubuntu 20.04 Foxy
- Realsense D435/D435i
Installation
sudo apt install ros-$ROS_DISTRO-pcl-*
Install the ROS2 wrapper for realsense
and configure Realsense to work with ROS2
Usage
PCL filter
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_filter node:
ros2 run ros2_rs_pcl rs_pcl_filter
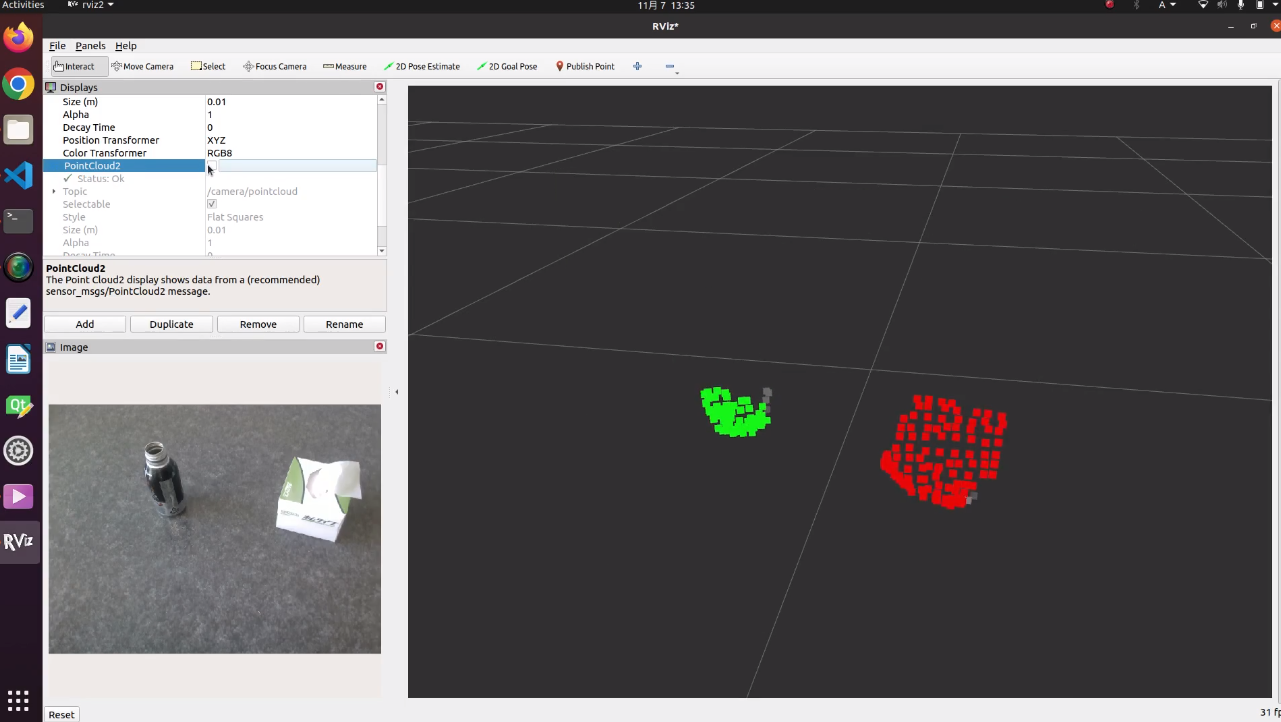
PCL clustering
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_clustering
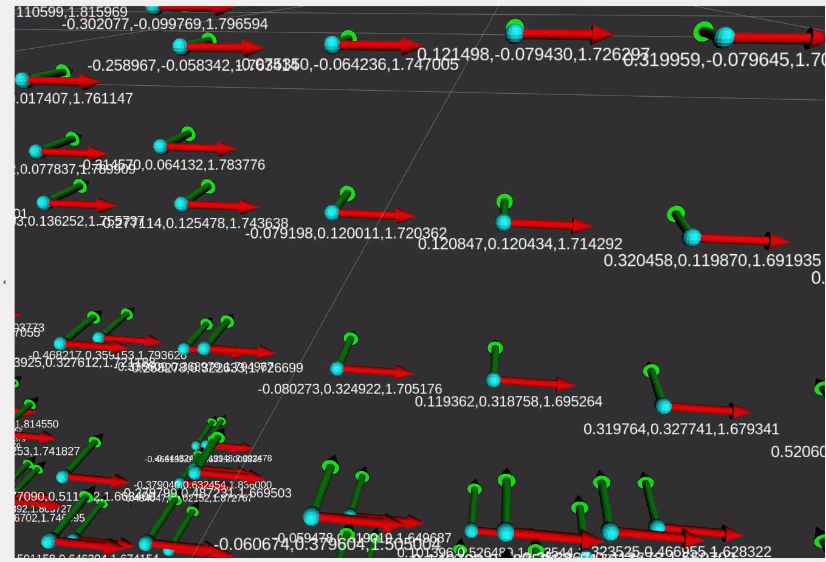
PCL and visualization marker sample
Open two shells. In the first shell, run the ros2_intel_realsense node
ros2 launch realsense_examples rs_camera.launch.py
In the second shell, run the pcl_clustering node:
ros2 run ros2_rs_pcl rs_pcl_marker
License
This repository is licensed under the MIT license, see LICENSE.
CHANGELOG
No CHANGELOG found.
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
No direct system dependencies.
Dependant Packages
No known dependants.
Launch files
No launch files found
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged ros2_rs_pcl at Robotics Stack Exchange
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro ardent. Known supported distros are highlighted in the buttons above.
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
No version for distro crystal. Known supported distros are highlighted in the buttons above.
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
No version for distro dashing. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro foxy. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro lunar. Known supported distros are highlighted in the buttons above.
No version for distro jade. Known supported distros are highlighted in the buttons above.
No version for distro indigo. Known supported distros are highlighted in the buttons above.
No version for distro hydro. Known supported distros are highlighted in the buttons above.
No version for distro kinetic. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.