
|
carla_autoware_bridge package from carla_autoware_bridge repocarla_autoware_bridge |
Package Summary
| Tags | No category tags. |
| Version | 0.2.0 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | Addition to carla_ros_bridge to convert carla messages to autoware messages |
| Checkout URI | https://github.com/robotics010/carla_autoware_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-06-04 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Robotics010
Authors
carla_autoware_bridge
An addition package to carla_ros_bridge to connect CARLA simulator to Autoware Universe software.
Warning! This is still Work in Progress repository. Reports and improvement suggestions are very welcome.
Why carla_autoware_bridge is required?
However there is no official support of the Autoware Universe self-driving open source project from CARLA developers, there is a maintained carla_ros_bridge, which supports communication between CARLA simulator and ROS2 applications. This ROS2 package reuses carla_ros_bridge and adds missing things to support communicating with the Autoware Universe.
Getting started tutorial
Go to Getting started tutorial to setup and launch autoware simulation with CARLA simulator.
Current limitations
- only galactic support (no humble support yet)
- sensors’ position/rotation and calibration were not configured properly yet
Frequently asked questions
Is it possible to add humble compatibility?
Currently it isn’t. CARLA developers currently supports up to foxy version and it just works with galactic as well. I’ve asked about humble support as a part of other discussion, but I haven’t got any response yet.
Does the bridge has performance issues especially when using many lidars?
Yes, but you can take advantage of CARLA synchronous mode. By default without the carla-autoware-bridge, CARLA runs in asynchronous mode. The server runs the simulation as fast as possible, without waiting for the client. On synchronous mode, the server waits for a client tick, a “ready to go” message, before updating to the following simulation step. Thus a simulation together with Autoware stack can be tested even not in a performant enough machine.
Can I use docker installation instead?
Yes, you can look at correspoding steps from the autoware tutorials. I didn’t use docker installation because of launching rviz inside galactic docker problem. It looks like humble doesn’t have the same problem.
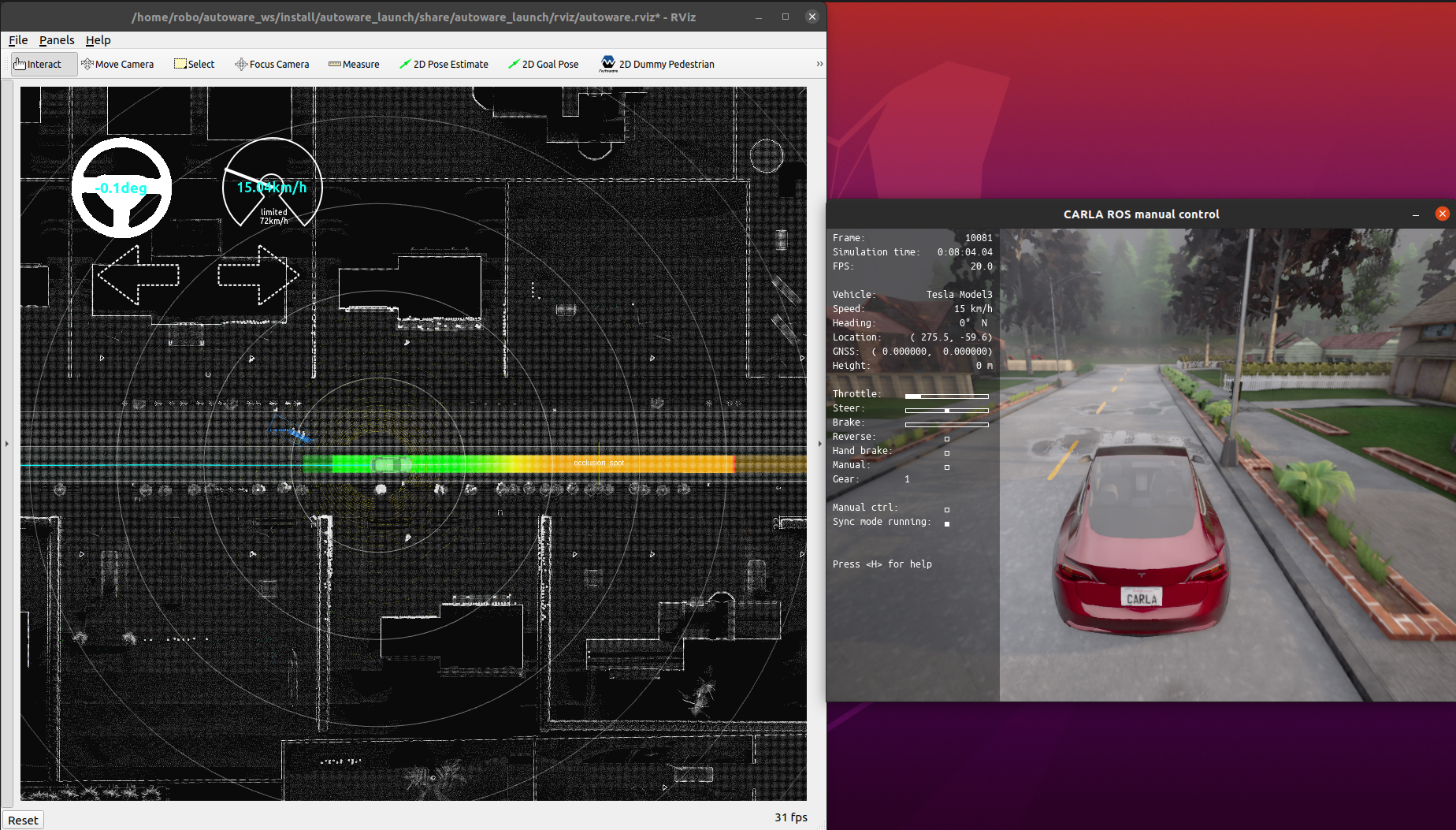
How can I control the vehicle manually from the keyboard?
You can use manual_control_window from the CARLA ros-bridge. Just press B and then use WASD keys to control ego vehicle. Use Q key to reverse drive.
Troubleshooting
Go to Troubleshooting section in order to fix some known problems.
carla_autoware_bridge 0.2
- use raw_vehicle_converter and accel/brake map
- acquire accel/brake map for carla.tesla.model3 vehicle
- reimplement steer map conversion
- tune control for a vehicle
- prepare vehicle for auto mode after spawn
- add steering feedback subscription
- add carla_launch packages
carla_autoware_bridge 0.1
- missing converters, that allow carla-autoware communication:
- imu
- velocity report
- steering status
- control cmd
- minimal control calibration
- reuse and remap ros-bridge
- configuration of lidar position and rotation
- add getting started tutorial
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
| Name |
|---|
| python3-pytest |