No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
central_system package from smart_vehicle_qualifying_match repocentral_system lane_detector |
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Description | 智能车航天智慧物流创意组预选赛 |
| Checkout URI | https://github.com/chenjunnn/smart_vehicle_qualifying_match.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-19 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
TODO: Package description
Additional Links
No additional links.
Maintainers
- chenjun
Authors
No additional authors.
中央任务调度系统-通信开发
Web 实现
使用了 ROS2 的 Python 框架 rclpy 及 一个轻量的 Python GUI 库 remi
rclpy: ROS Client Library for the Python language.
Remi is a GUI library for Python applications that gets rendered in web browsers. This allows you to access your interface locally and remotely.
主要思路
-
使用 rclpy 创建一个节点用于和 ROS2 系统交互,负责订阅 ROS 的消息,以及将 web 页面的文本输入以
std_msgs/msg/String的消息类型发布出去 -
使用 remi 创建一个网页端的 GUI,使得任何装有浏览器的设备都可与之交互。这个 GUI 界面主要包含了一个 label 用于显示 server 端的发布的数据,一个文本输入框用于输入向 server 发布的数据,一个按钮用于触发发布事件。
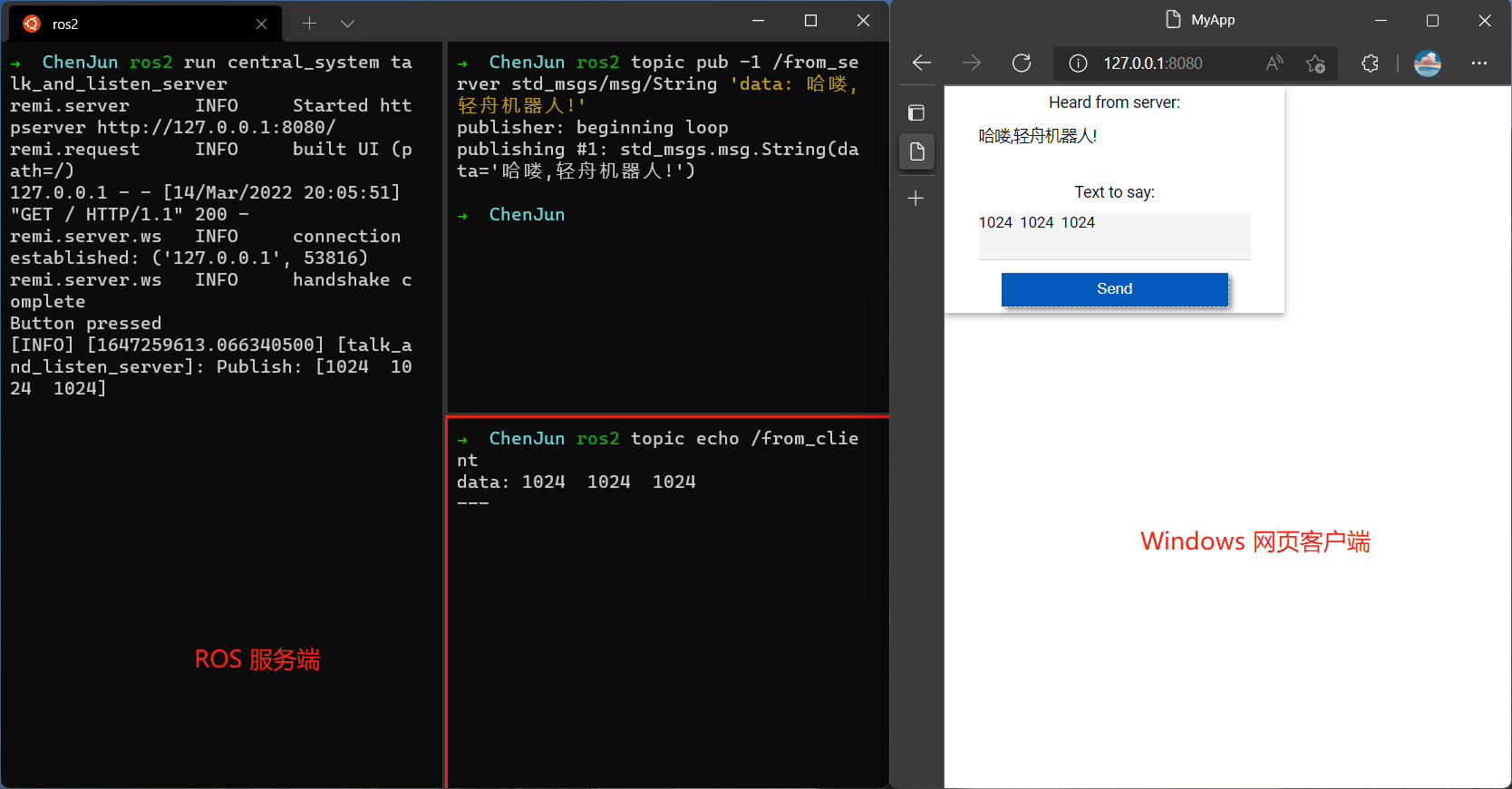
实现效果图
使用 Docker 部署
构建镜像
# 在 Dockerfile 路径下
docker build -t central_system .
启动容器
docker run -it --rm --name cs -p 8080:8080 central_system
打开浏览器,输入 localhost:8080 即可连接到服务端
通过服务端向网页客户端发送信息及接收网页端的消息
# 进入容器
docker exec -it cs bash
# 执行 ROS setup 脚本
source install/setup.bash
# 发布消息
ros2 topic pub -1 /from_server std_msgs/msg/String 'data: 哈喽,轻舟机器人!'
# 接收消息
ros2 topic echo /from_client
CHANGELOG
No CHANGELOG found.
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Dependant Packages
No known dependants.
Launch files
No launch files found
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged central_system at Robotics Stack Exchange
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.