
|
event_camera_renderer package from event_camera_renderer repoevent_camera_renderer |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.1.3 |
| License | Apache2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-event-camera/event_camera_renderer.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-02-04 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Bernd Pfrommer
Authors
event_camera_renderer
This repository holds tools for rendering event_camera_msgs. It builds under both ROS1 and ROS2.

Supported platforms
Currently tested on Ubuntu 20.04 (ROS Noetic and ROS2 Galactic) and Ubuntu 22.04 (ROS2 Humble).
How to build
Create a ROS workspace, clone this repo, and use vcs
to pull in the remaining dependencies:
pkg=event_camera_renderer
mkdir -p ~/$pkg/src
cd ~/$pkg
git clone https://github.com/ros-event-camera/${pkg}.git src/${pkg}
cd src
vcs import < ${pkg}/${pkg}.repos
cd ..
configure and build on ROS1:
catkin config -DCMAKE_BUILD_TYPE=RelWithDebInfo # (optionally add -DCMAKE_EXPORT_COMPILE_COMMANDS=1)
catkin build
configure and build on ROS2:
cd ~/$pkg/src
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo # (optionally add -DCMAKE_EXPORT_COMPILE_COMMANDS=1)
How to use
Examine the launch file and adjust the topic remapping, frequency
etc, then start as follows (assuming the camera driver is running
under node name event_camera):
ROS1:
# create rendered ROS image stream from events
roslaunch event_camera_renderer renderer.launch camera:=event_camera
rqt_image_view
ROS2:
# create rendered ROS image stream from events
ros2 launch event_camera_renderer renderer.launch.py camera:=event_camera
ros2 run rqt_image_view rqt_image_view
Parameters:
-
fpsFrequency (in hz) at which images are emitted. Default: 25. -
display_typeSupported types aretime_slice(all events between frames are aggregated) orsharp(number of events is auto-controlled to produce sharp features). Default istime_slice. This image shows the difference (left is sharp, right is time_slice):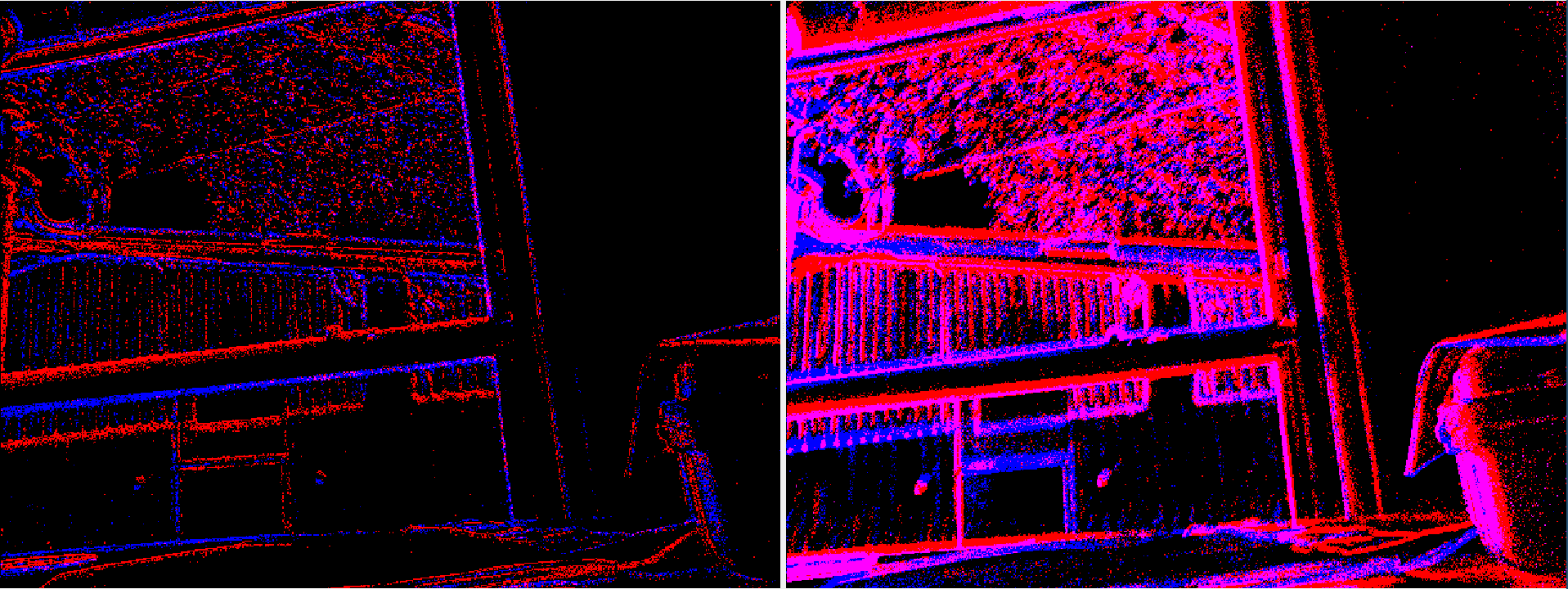
License
This software is issued under the Apache License Version 2.0.
Changelog for package event_camera_renderer
1.1.3 (2024-02-04)
- permit variable sensor size
- change formatting of python files to make flake8 linter happy
- ignore pyc files
- Contributors: Bernd Pfrommer
1.1.2 (2023-09-21)
- added dependency on ament_cmake_clang_format
- Contributors: Bernd Pfrommer
1.1.1 (2023-09-19)
- Initial release
- Contributors: Bernd Pfrommer
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/renderer.launch
-
- camera [default: /event_camera]
- topic [default: events]
- type [default: time_slice]
Messages
Services
Plugins
Recent questions tagged event_camera_renderer at Robotics Stack Exchange
|
|
event_camera_renderer package from event_camera_renderer repoevent_camera_renderer |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.4 |
| License | Apache2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-event-camera/event_camera_renderer.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2024-05-29 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Bernd Pfrommer
Authors
event_camera_renderer
This repository holds tools for rendering event_camera_msgs. It builds under both ROS1 and ROS2.

Supported platforms
Currently tested on Ubuntu 20.04 (ROS Noetic and ROS2 Galactic) and Ubuntu 22.04 (ROS2 Humble).
How to build
Set the following shell variables:
repo=event_camera_renderer
url=https://github.com/ros-event-camera/${repo}.git
and follow the instructions here
How to use
Examine the launch file and adjust the topic remapping, frequency
etc, then start as follows (assuming the camera driver is running
under node name event_camera):
ROS1:
# create rendered ROS image stream from events
roslaunch event_camera_renderer renderer.launch camera:=event_camera
rqt_image_view
ROS2:
# create rendered ROS image stream from events
ros2 launch event_camera_renderer renderer.launch.py camera:=event_camera
ros2 run rqt_image_view rqt_image_view
Parameters:
-
fpsFrequency (in hz) at which images are emitted. Default: 25. -
display_typeSupported types aretime_slice(all events between frames are aggregated) orsharp(number of events is auto-controlled to produce sharp features). Default istime_slice. This image shows the difference (left is sharp, right is time_slice):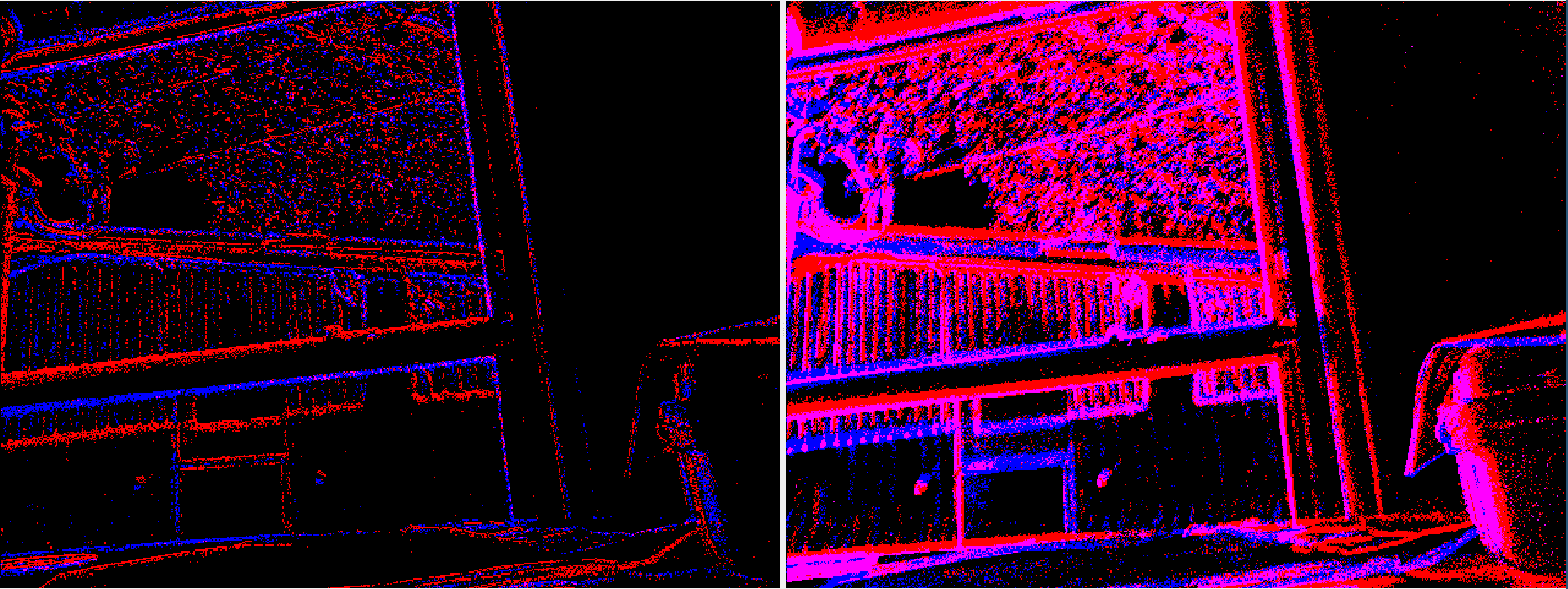
License
This software is issued under the Apache License Version 2.0.
Changelog for package event_camera_renderer
1.0.4 (2024-05-29)
- fix linter errors on noble
- updated build instructions
- Contributors: Bernd Pfrommer
1.0.3 (2024-02-04)
- permit variable sensor size
- change formatting of python files to make flake8 linter happy
- ignore pyc files
- Contributors: Bernd Pfrommer
1.0.2 (2023-09-21)
- added dependency on ament_cmake_clang_format
- Contributors: Bernd Pfrommer
1.0.1 (2023-09-19)
- Initial release
- Contributors: Bernd Pfrommer
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/renderer.launch
-
- camera [default: /event_camera]
- topic [default: events]
- type [default: time_slice]
Messages
Services
Plugins
Recent questions tagged event_camera_renderer at Robotics Stack Exchange
|
|
event_camera_renderer package from event_camera_renderer repoevent_camera_renderer |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.4 |
| License | Apache2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-event-camera/event_camera_renderer.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2024-05-29 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Bernd Pfrommer
Authors
event_camera_renderer
This repository holds tools for rendering event_camera_msgs. It builds under both ROS1 and ROS2.
Supported platforms
Currently tested on Ubuntu 20.04 (ROS Noetic and ROS2 Galactic) and Ubuntu 22.04 (ROS2 Humble).
How to build
Set the following shell variables:
repo=event_camera_renderer
url=https://github.com/ros-event-camera/${repo}.git
and follow the instructions here
How to use
Examine the launch file and adjust the topic remapping, frequency
etc, then start as follows (assuming the camera driver is running
under node name event_camera):
ROS1:
# create rendered ROS image stream from events
roslaunch event_camera_renderer renderer.launch camera:=event_camera
rqt_image_view
ROS2:
# create rendered ROS image stream from events
ros2 launch event_camera_renderer renderer.launch.py camera:=event_camera
ros2 run rqt_image_view rqt_image_view
Parameters:
-
fpsFrequency (in hz) at which images are emitted. Default: 25. -
display_typeSupported types aretime_slice(all events between frames are aggregated) orsharp(number of events is auto-controlled to produce sharp features). Default istime_slice. This image shows the difference (left is sharp, right is time_slice):
License
This software is issued under the Apache License Version 2.0.
Changelog for package event_camera_renderer
1.0.4 (2024-05-29)
- fix linter errors on noble
- updated build instructions
- Contributors: Bernd Pfrommer
1.0.3 (2024-02-04)
- permit variable sensor size
- change formatting of python files to make flake8 linter happy
- ignore pyc files
- Contributors: Bernd Pfrommer
1.0.2 (2023-09-21)
- added dependency on ament_cmake_clang_format
- Contributors: Bernd Pfrommer
1.0.1 (2023-09-19)
- Initial release
- Contributors: Bernd Pfrommer
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/renderer.launch
-
- camera [default: /event_camera]
- topic [default: events]
- type [default: time_slice]
Messages
Services
Plugins
Recent questions tagged event_camera_renderer at Robotics Stack Exchange
|
|
event_camera_renderer package from event_camera_renderer repoevent_camera_renderer |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.2.3 |
| License | Apache2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-event-camera/event_camera_renderer.git |
| VCS Type | git |
| VCS Version | iron |
| Last Updated | 2024-02-04 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Bernd Pfrommer
Authors
event_camera_renderer
This repository holds tools for rendering event_camera_msgs. It builds under both ROS1 and ROS2.

Supported platforms
Currently tested on Ubuntu 20.04 (ROS Noetic and ROS2 Galactic) and Ubuntu 22.04 (ROS2 Humble).
How to build
Create a ROS workspace, clone this repo, and use vcs
to pull in the remaining dependencies:
pkg=event_camera_renderer
mkdir -p ~/$pkg/src
cd ~/$pkg
git clone https://github.com/ros-event-camera/${pkg}.git src/${pkg}
cd src
vcs import < ${pkg}/${pkg}.repos
cd ..
configure and build on ROS1:
catkin config -DCMAKE_BUILD_TYPE=RelWithDebInfo # (optionally add -DCMAKE_EXPORT_COMPILE_COMMANDS=1)
catkin build
configure and build on ROS2:
cd ~/$pkg/src
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo # (optionally add -DCMAKE_EXPORT_COMPILE_COMMANDS=1)
How to use
Examine the launch file and adjust the topic remapping, frequency
etc, then start as follows (assuming the camera driver is running
under node name event_camera):
ROS1:
# create rendered ROS image stream from events
roslaunch event_camera_renderer renderer.launch camera:=event_camera
rqt_image_view
ROS2:
# create rendered ROS image stream from events
ros2 launch event_camera_renderer renderer.launch.py camera:=event_camera
ros2 run rqt_image_view rqt_image_view
Parameters:
-
fpsFrequency (in hz) at which images are emitted. Default: 25. -
display_typeSupported types aretime_slice(all events between frames are aggregated) orsharp(number of events is auto-controlled to produce sharp features). Default istime_slice. This image shows the difference (left is sharp, right is time_slice):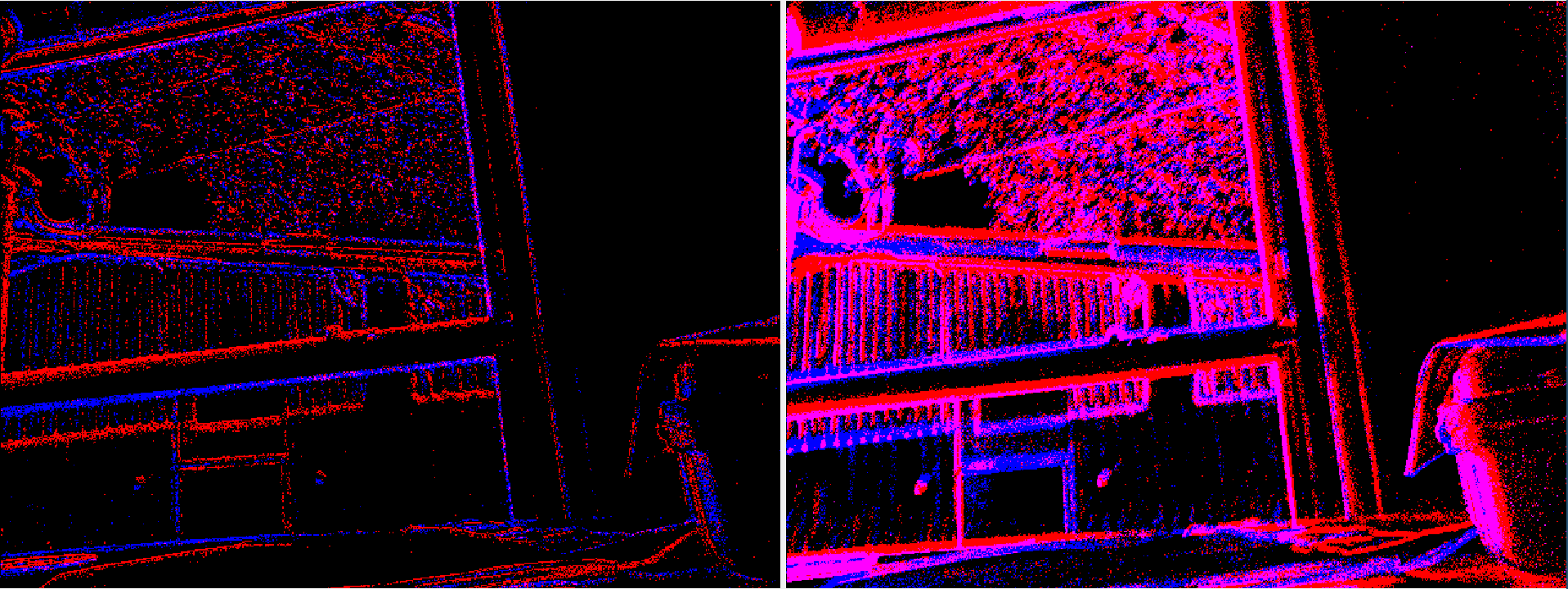
License
This software is issued under the Apache License Version 2.0.
Changelog for package event_camera_renderer
1.2.3 (2024-02-04)
- permit variable sensor size
- change formatting of python files to make flake8 linter happy
- ignore pyc files
- Contributors: Bernd Pfrommer
1.2.2 (2023-11-09)
- initial release
- Contributors: Bernd Pfrommer
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/renderer.launch
-
- camera [default: /event_camera]
- topic [default: events]
- type [default: time_slice]