No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.

|
rosbag_editor package from rosbag_editor reporosbag_editor |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.4.2 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/facontidavide/rosbag_editor.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2021-01-20 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration : 0 / 0 |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
The rosbag_editor package
Additional Links
Maintainers
- dfaconti
Authors
No additional authors.
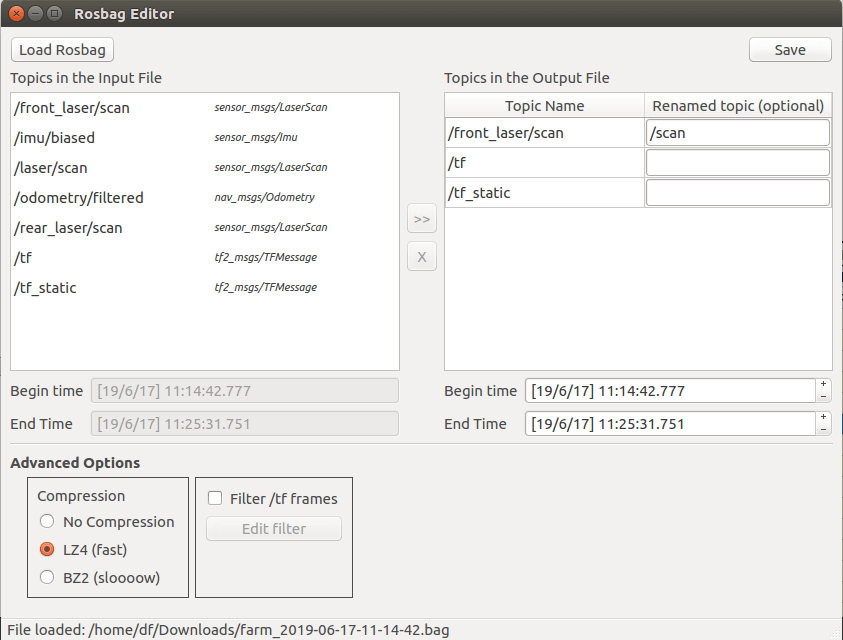
Rosbag Editor
If you need to:
- remove one or more topics from a rosbag.
- change the duration of the rosbag (initial and final time).
- rename a topic.
- change the compression type.
- remove specific transformations from your /tf.
and, most importantly:
- you dislike complicated command line interfaces as much as I do.
Then this application is the right for you.
To run it, use the command:
rosrun rosbag_editor rosbag_editor
CHANGELOG
Changelog for package rosbag_editor
0.4.2 (2019-10-26)
- downgrade to c++11
- Contributors: Davide Faconti
0.4.0 (2019-10-24)
- add TF filter
- add the ability to rename topics
- Contributors: Davide Faconti
0.3.0 (2019-10-15)
0.2.0 (2019-10-15)
- fixing few issues
- Contributors: Davide Faconti
0.1.0 (2019-07-15)
- Initial commit
- Contributors: Davide Faconti
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Dependant Packages
No known dependants.
Launch files
No launch files found
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.