No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
serow_ros package from serow reposerow_ros serow_ros2 |
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | GPL-3.0-only |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | SEROW Framework for N Legged Robot Walking Estimation |
| Checkout URI | https://github.com/mrsp/serow.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-05-08 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | real-time cpp robotics ros gazebo outlier-detection state-estimation humanoids humanoid-robots humanoid-walking bipedal-robots base-estimation center-of-mass quadruped-robots bipeds |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
The serow_ros package
Additional Links
No additional links.
Maintainers
- Stylianos Piperakis
- Micheal Maravgakis
Authors
No additional authors.
Getting Started
These instructions will get you a copy of the project up and running on your local machine for testing purposes with ROS noetic.
Install
- Install SEROW
- Create a ROS workspace with
mkdir -p ros_ws/src cd ros_ws/srcln -s $SEROW_PATH/serow_ros ./serow_roscd .. && catkin_make -DCMAKE_BUILD_TYPE=Release
Minimum Robot Requirements
Using the Base Estimator to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
Requirements
- Robot state publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for detecting contact (e.g. topic:
/left_leg/force_torque_states,/right_leg/force_torque_states)
Using the full cascade framework (Base Estimator + CoM Estimator) to estimate:
- 3D-Base position/orientation/linear velocity
- 3D-Contact foot position/orientation
- IMU biases
- 3D-CoM position/linear velocity
- 3D-External forces on CoM
Requirements:
- Robot State Publisher (e.g. topic:
/joint_states) - IMU (e.g. topic
/imu0) - Feet Pressure or Force/Torque sensors for Center of Pressure (COP) computation in the local foot frame (e.g. topics
/left_leg/force_torque_states,/right_leg/force_torque_states)
Using our serow_utils package
Use the serow_utils to visualize the estimated trajectories and to contrast them with other trajectories (e.g. ground_truth).
ROS Examples
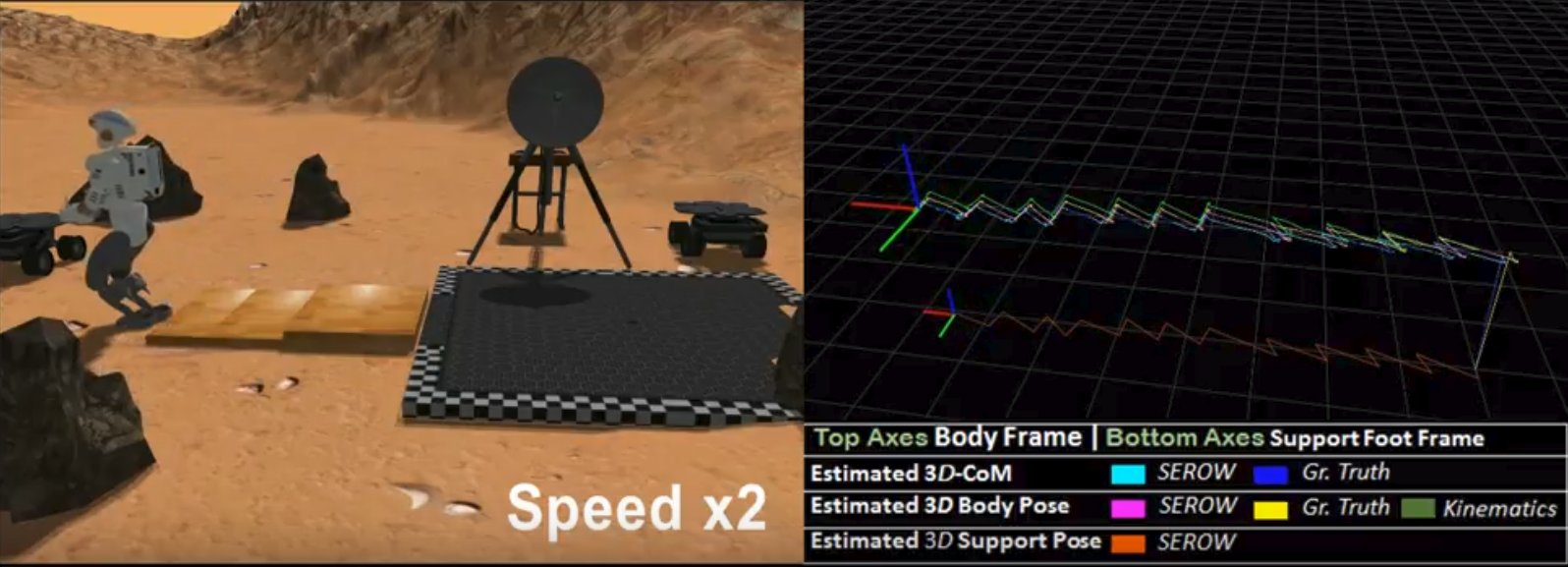
Valkyrie SRCsim
- Download the valkyrie bag file from valk_bagfile
roscorerosbag play --pause valk.bagroslaunch serow_ros serow_valk.launchroslaunch serow_ros serow_utils.launch- hit space to unpause the rosbag play
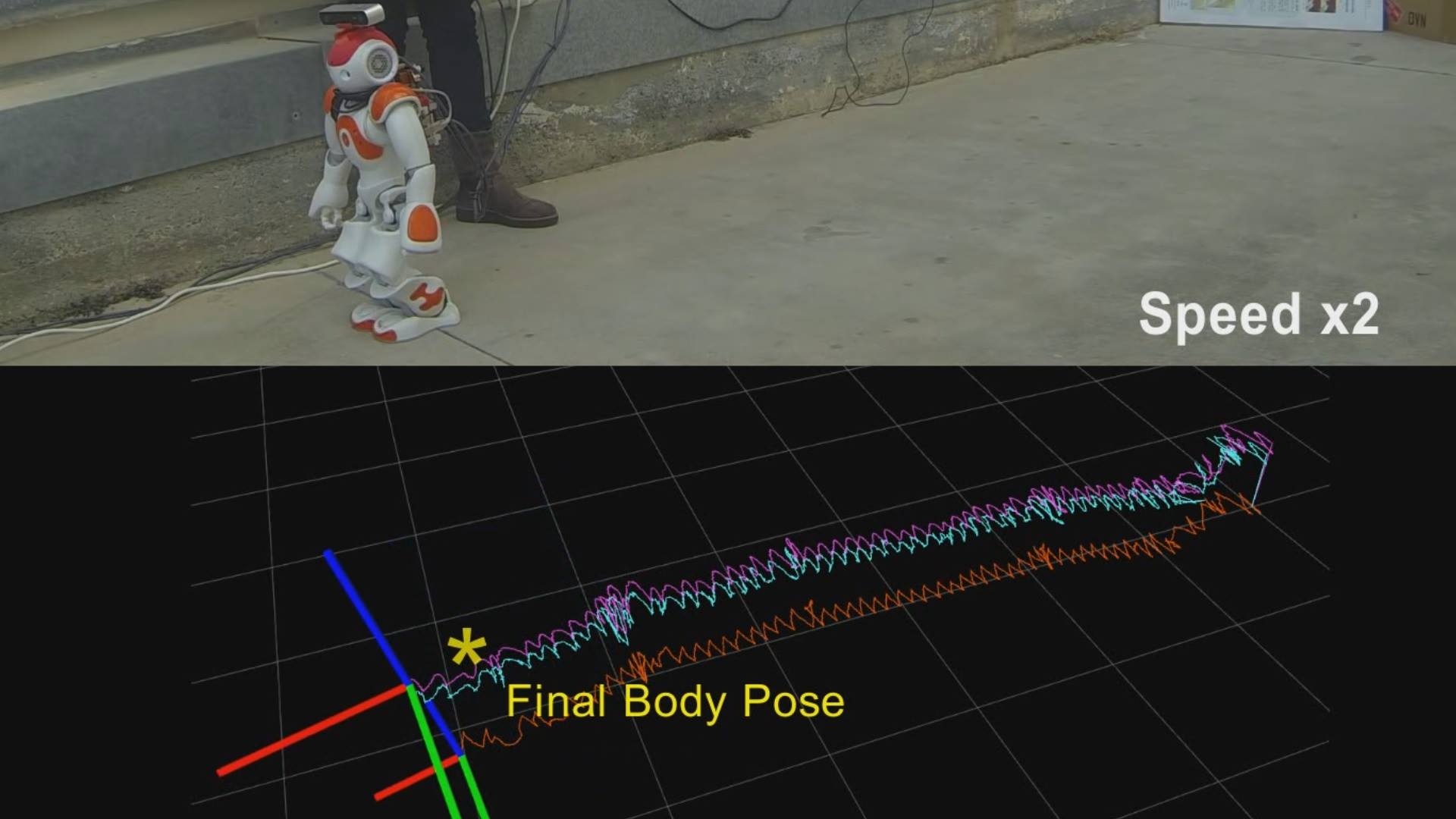
NAO Walking on rough terrain outdoors
- Download the nao bag file from nao_bagfile
roscorerosbag play --pause nao.bagroslaunch serow_ros serow_nao.launchroslaunch serow_ros serow_utils.launch- hit space to unpause the rosbag play
Launch on your Robot in real time
- Specify topics on
config/estimation_params.yaml roslaunch serow_ros serow.launch
Citation
Upon usage in an academic work kindly cite:
@ARTICLE{PiperakisRAL18,
author={S. {Piperakis} and M. {Koskinopoulou} and P. {Trahanias}},
journal={IEEE Robotics and Automation Letters},
title={{Nonlinear State Estimation for Humanoid Robot Walking}},
year={2018},
volume={3},
number={4},
pages={3347-3354},
doi={10.1109/LRA.2018.2852788},
month={Oct},
}
License
CHANGELOG
No CHANGELOG found.
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| sensor_msgs | |
| geometry_msgs | |
| nav_msgs | |
| catkin | |
| pinocchio |
System Dependencies
No direct system dependencies.
Dependant Packages
No known dependants.
Launch files
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged serow_ros at Robotics Stack Exchange
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.