
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception fast_gicp hdl_global_localization hdl_localization ndt_omp |
|
|
Repository Summary
| Description | ROS Packages for Real-Time 3D LIDAR Based Localization using NDT Scan Matching Algorithm and UKF Estimation |
| Checkout URI | https://github.com/tinker-twins/3d-lidar-localization.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-05-01 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | localization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| fast_gicp | 0.1.0 |
| hdl_global_localization | 0.1.0 |
| hdl_localization | 0.1.0 |
| ndt_omp | 0.1.0 |
README
3D LIDAR Localization | ROS
ROS Packages for Real-Time 3D LIDAR Based Localization using Normal Distribution Transform (NDT) Scan Matching Algorithm and Unscented Kalman Filter (UKF) Estimation.
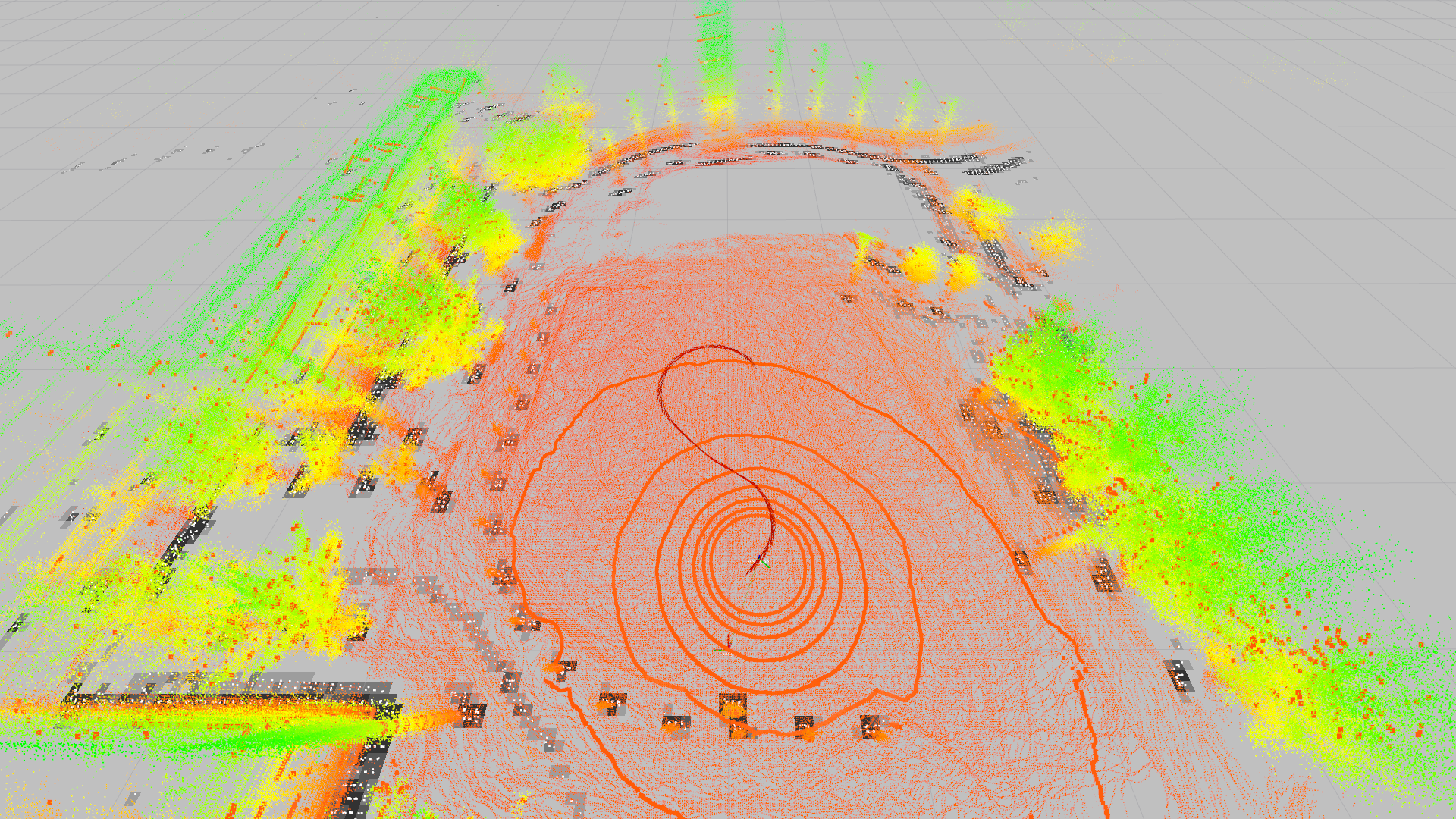
This localization algorithm performs Unscented Kalman Filter (UKF) based pose estimation. It first estimates the sensor pose from IMU data (IMU-based pose prediction is optional, if disabled, the system uses a constant velocity model) implemented on the LIDAR, and then performs multi-threaded NDT scan matching between a global map point cloud and input sensor point clouds to correct the estimated pose.
Dependencies
hdl_localization requires the following libraries:
- PCL
- OpenMP
hdl_localization requires the following ROS packages:
- pcl_ros
- ndt_omp
- fast_gicp
- hdl_global_localization
Installation
cd ROS1_Workspace
- For nominal NDT:
catkin_make -DCMAKE_BUILD_TYPE=Release
- For CUDA-accelerated NDT:
catkin_make -DCMAKE_BUILD_TYPE=Release -DBUILD_VGICP_CUDA=ON
> ### Prerequisites for CUDA-Accelerated NDT Algorithm
- Install NVIDIA drivers for Ubuntu [Tested with `nvidia-driver-525` for Ubuntu 20.04 via `Software & Updates` GUI]
- Install CUDA Toolkit for Ubuntu [[Tested with `CUDA Toolkit 11.6` for Ubuntu 20.04](https://developer.nvidia.com/cuda-11-6-2-download-archive?target_os=Linux&target_arch=x86_64&Distribution=Ubuntu&target_version=20.04&target_type=deb_local)]
- Set up the development environment by modifying the `PATH` and `LD_LIBRARY_PATH` variables in `~/.bashrc`:
# CUDA
export PATH=/usr/local/cuda/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH
Configuration
- All configurable parameters are listed in
launch/hdl_localization.launch. - The estimated pose can be set and reset using using
2D Pose Estimatein RViz.
Topics
-
/odom (nav_msgs/Odometry)
- Estimated sensor pose in the map frame
-
/aligned_points (sensor_msgs/PointCloud2)
- Input point cloud aligned with the map
-
/status (hdl_localization/ScanMatchingStatus)
- Scan matching result information (e.g., convergence, matching error, and inlier fraction)
Services
-
/relocalize (std_srvs/Empty)
- Reset the sensor pose with the global localization result
Execution
Open a terminal and launch hdl_localization.
roslaunch hdl_localization hdl_localization.launch
Open another terminal and play a pre-recorded rosbag or start streming data from sensor.
rosparam set use_sim_time true
rosbag play --clock <ROSBAG_PATH>
Open another terminal and call a service to reset the sensor pose with the global localization result (if required).
rosservice call /relocalize
Note: If the algorithm does not work very well or if the CPU usage is too high, change
ndt_neighbor_search_methodinhdl_localization.launchtoDIRECT1. It makes the scan matching significantly fast, but is a bit unstable.
CONTRIBUTING
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|
|
|
3d-lidar-localization repositorylocalization robotics point-cloud estimation ros perception lidar robotics-programming lidar-point-cloud 3d-lidar 3d-perception |
|
|