
No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
|
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/kazu-321/autorobo.universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| autorobo_behavior | 0.0.0 |
| autorobo_teleop | 0.0.0 |
| autorobo_visualization | 0.0.0 |
| autorobo_control | 0.0.0 |
| autorobo_launch | 0.0.0 |
| autorobo_localization | 0.0.0 |
| autorobo_map | 0.0.0 |
| autorobo_msgs | 0.0.0 |
| autorobo_planner | 0.0.0 |
| autorobo_simulation | 0.0.0 |
README
autorobo.universe
2024NHK高専ロボコン 茨城高専Bチーム
ごじゃっペサーカスR1の制御です。
important!
ライセンス整備がまだです!
Screencast from 2024年10月08日 09時55分05秒.webm
ビルド
$ # cd to your ws
$ cd src
$ git clone https://github.com/kazu-321/autorobo.universe
$ cd ../
$ colcon build
$ source install/setup.bash
実行
シミュレーターの起動
$ ros2 launch autorobo_launch sim.launch.xml
電源オン、navオンの状態で起動します
子機(サル)などを一通り射出したらGoalを自分で設定できます
gキーを押して画面をクリックしたらそこへロボットが移動します
ロボットは常に前を向くようにしています
teleop
teleop key
$ ros2 run autorobo_teleop teleop_key
バックグラウンドteleop key
$ ros2 run autorobo_teleop background_key
teleopの操作方法
- cキー
- コンティニュー
- ロボコンのルールに基づいた遠隔非常停止解除用 - pキー
- ポーズ
- 再度コンティニュー(c)すればロボットを動かせる - waxdキー
- 4方向移動
- nav offの状態じゃないと動けない - sキー
- ユーザー入力による移動ストップ - nキー
- 自動運転のon off切り替え用
- 最初はon - oキー
- 射出許可など自動運転時に安全のためにあるボタン
- コンティニュー&&自動運転on ならパスが生成されたりする
未検証
- rosbag関係のlaunch
- 実際に使用した慣性モデル付きのシミュレーター
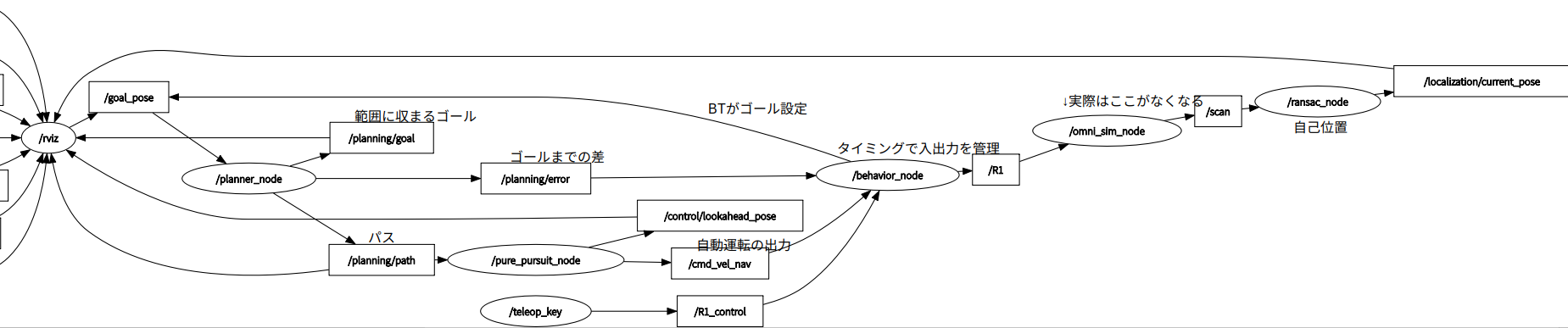
Node Graph
CONTRIBUTING
No CONTRIBUTING.md found.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.