
|
clover repositoryeducation raspberry-pi computer-vision drone quadcopter robotics aruco ros px4 optical-flow mavros |
|
|
|
|
clover repositoryeducation raspberry-pi computer-vision drone quadcopter robotics aruco ros px4 optical-flow mavros |
|
|
|
|
clover repositoryeducation raspberry-pi computer-vision drone quadcopter robotics aruco ros px4 optical-flow mavros |
|
|
|
|
clover repositoryeducation raspberry-pi computer-vision drone quadcopter robotics aruco ros px4 optical-flow mavros |
|
|
|
|
clover repositoryeducation raspberry-pi computer-vision drone quadcopter robotics aruco ros px4 optical-flow mavros |
|
|
|
|
clover repositoryeducation raspberry-pi computer-vision drone quadcopter robotics aruco ros px4 optical-flow mavros |
|
|
|
|
clover repositoryeducation raspberry-pi computer-vision drone quadcopter robotics aruco ros px4 optical-flow mavros |
|
|
|
|
clover repositoryeducation raspberry-pi computer-vision drone quadcopter robotics aruco ros px4 optical-flow mavros |
|
|
|
|
clover repositoryeducation raspberry-pi computer-vision drone quadcopter robotics aruco ros px4 optical-flow mavros aruco_pose clover clover_blocks clover_description clover_simulation roswww_static |
|
|
Repository Summary
| Description | ROS-based framework and RPi image to control PX4-powered drones 🍀 |
| Checkout URI | https://github.com/CopterExpress/clover.git |
| VCS Type | git |
| VCS Version | melodic-devel |
| Last Updated | 2021-05-26 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | education raspberry-pi computer-vision drone quadcopter robotics aruco ros px4 optical-flow mavros |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| aruco_pose | 0.21.3 |
| clover | 0.21.3 |
| clover_blocks | 0.21.3 |
| clover_description | 0.21.3 |
| clover_simulation | 0.21.3 |
| roswww_static | 0.21.3 |
README
clover🍀: create autonomous drones easily
Clover is an open source ROS-based framework, providing user-friendly tools to control PX4-powered drones. Clover is available as a ROS package, but is shipped mainly as a preconfigured image for Raspberry Pi. Once you’ve installed Raspberry Pi on your drone and flashed the image to its microSD card, taking the drone up in the air is a matter of minutes.
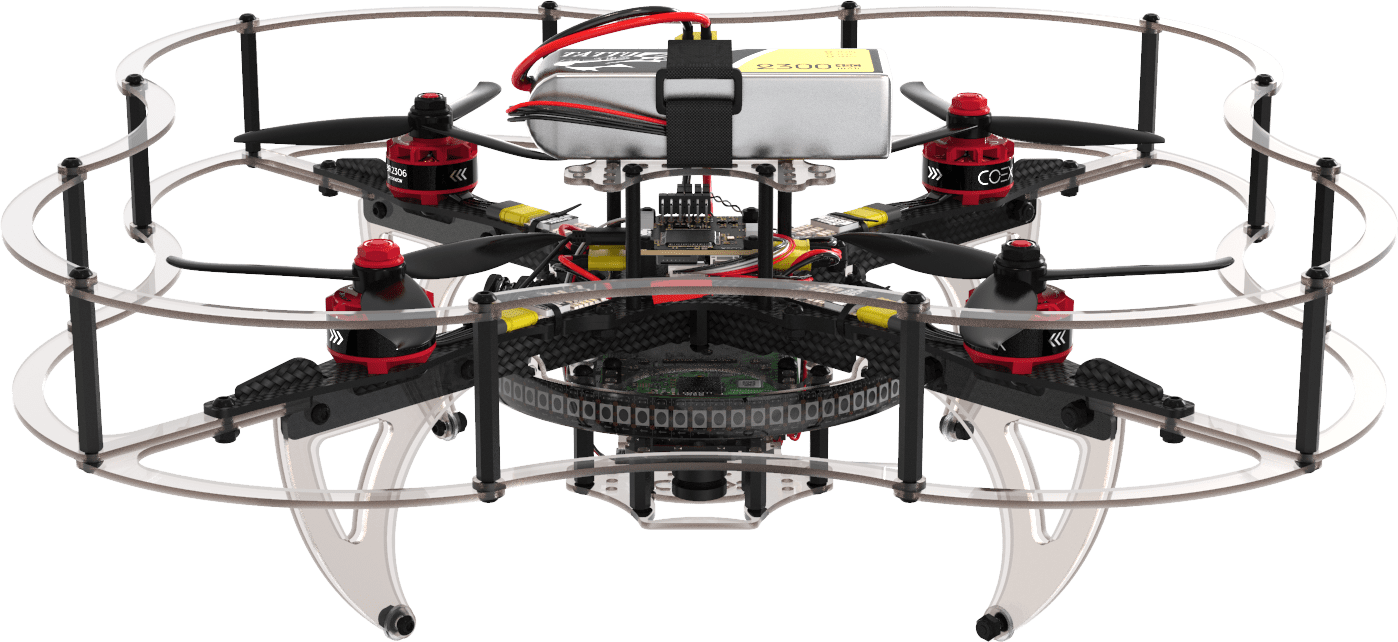
COEX Clover Drone is an educational programmable drone kit, suited perfectly for running clover software. The kit is shipped unassembled and includes Pixracer-compatible autopilot running PX4 firmware, Raspberry Pi 4 as a companion computer, a camera for computer vision navigation as well as additional sensors and peripheral devices. Batteries included.
The main documentation is available at https://clover.coex.tech. Official website: coex.tech/clover.
Video compilation

Clover drone is used on a wide range of educational events, including Copter Hack, WorldSkills Drone Operation competition, Autonomous Vehicles Track of NTI Olympics 2016–2020, Quadro Hack 2019 (National University of Science and Technology MISiS), Russian Robot Olympiad (autonomous flights), and others.
Raspberry Pi image
Preconfigured image for Raspberry Pi with installed and configured software, ready to fly, is available in the Releases section.


Image features:
- Raspbian Buster
- ROS Melodic
- Configured networking
- OpenCV
mavros- Periphery drivers for ROS (GPIO, LED strip, etc)
-
aruco_posepackage for marker-assisted navigation -
cloverpackage for autonomous drone control
API description for autonomous flights is available on GitBook.
For manual package installation and running see clover package documentation.
License
While the Clover platform source code is available under the MIT License, note, that the documentation is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.