
|
cuda-accelerated-visual-inertial-odometry-fusion repositoryrobotics cuda cublas unscented-kalman-filter sensor-fusion state-estimation kalman-filter visual-inertial-odometry ros2 visual-odometry cusolver imu-sensor |
|
|
|
|
cuda-accelerated-visual-inertial-odometry-fusion repositoryrobotics cuda cublas unscented-kalman-filter sensor-fusion state-estimation kalman-filter visual-inertial-odometry ros2 visual-odometry cusolver imu-sensor |
|
|
|
|
cuda-accelerated-visual-inertial-odometry-fusion repositoryrobotics cuda cublas unscented-kalman-filter sensor-fusion state-estimation kalman-filter visual-inertial-odometry ros2 visual-odometry cusolver imu-sensor |
|
|
|
|
cuda-accelerated-visual-inertial-odometry-fusion repositoryrobotics cuda cublas unscented-kalman-filter sensor-fusion state-estimation kalman-filter visual-inertial-odometry ros2 visual-odometry cusolver imu-sensor |
|
|
|
|
cuda-accelerated-visual-inertial-odometry-fusion repositoryrobotics cuda cublas unscented-kalman-filter sensor-fusion state-estimation kalman-filter visual-inertial-odometry ros2 visual-odometry cusolver imu-sensor cuUKF |
|
|
Repository Summary
| Description | Harness the power of GPU acceleration for fusing visual odometry and IMU data with an advanced Unscented Kalman Filter (UKF) implementation. Developed in C++ and utilizing CUDA, cuBLAS, and cuSOLVER, this system offers unparalleled real-time performance in state and covariance estimation for robotics and autonomous system applications. |
| Checkout URI | https://github.com/jagennath-hari/cuda-accelerated-visual-inertial-odometry-fusion.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-03-21 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | robotics cuda cublas unscented-kalman-filter sensor-fusion state-estimation kalman-filter visual-inertial-odometry ros2 visual-odometry cusolver imu-sensor |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| cuUKF | 0.0.0 |
README
CUDA-Accelerated-Visual-Inertial-Odometry-Fusion
Harness GPU acceleration for advanced visual odometry and IMU data fusion with our Unscented Kalman Filter (UKF) implementation. Developed with C++ and powered by CUDA, cuBLAS, and cuSOLVER, the system delivers unmatched real-time performance in state and covariance estimation for robotics applications. Integrated with ROS 2 for seamless sensor data management, it ensures high-efficiency and scalable solutions for complex robotic systems, making it ideal for a wide range of autonomous system applications.
🏁 Dependencies
1) NVIDIA Driver (Official Download Link) 2) CUDA Toolkit (Official Link) 3) ROS 2 Humble (Official Link)
⚙️ Install
1) Clone https://github.com/jagennath-hari/CUDA-Accelerated-Visual-Inertial-Odometry-Fusion.git
2) Move cuUKF into ROS2_WORKSPACE
3) Modify the CMakeLists.txt file at set(CMAKE_CUDA_ARCHITECTURES 89) and change to your GPU architecture. If you don’t know which one you can refer to NVIDIA GPU Compute Capability.
4) cd ROS2_WORKSPACE build workspace using colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release --parallel-workers $(nproc)
📈 Running cuUKF
Launch the node using ros2 launch cuUKF gpu_filter.launch.py odom_topic:=/odom imu_topic:=/imu.
The /odom should be replaced with your nav_msgs/Odometry and the /imu should be replaced with your sensor_msgs/Imu.
💬 ROS 2 Message
The filter odometry gets published as nav_msgs/Odometry in the /cuUKF/filtered_odom topic.
🖼️ RVIZ2 GUI
Launch RVIZ2 using ros2 run rviz2 rviz2 and subcribe to the /cuUKF/filered_odom topic.
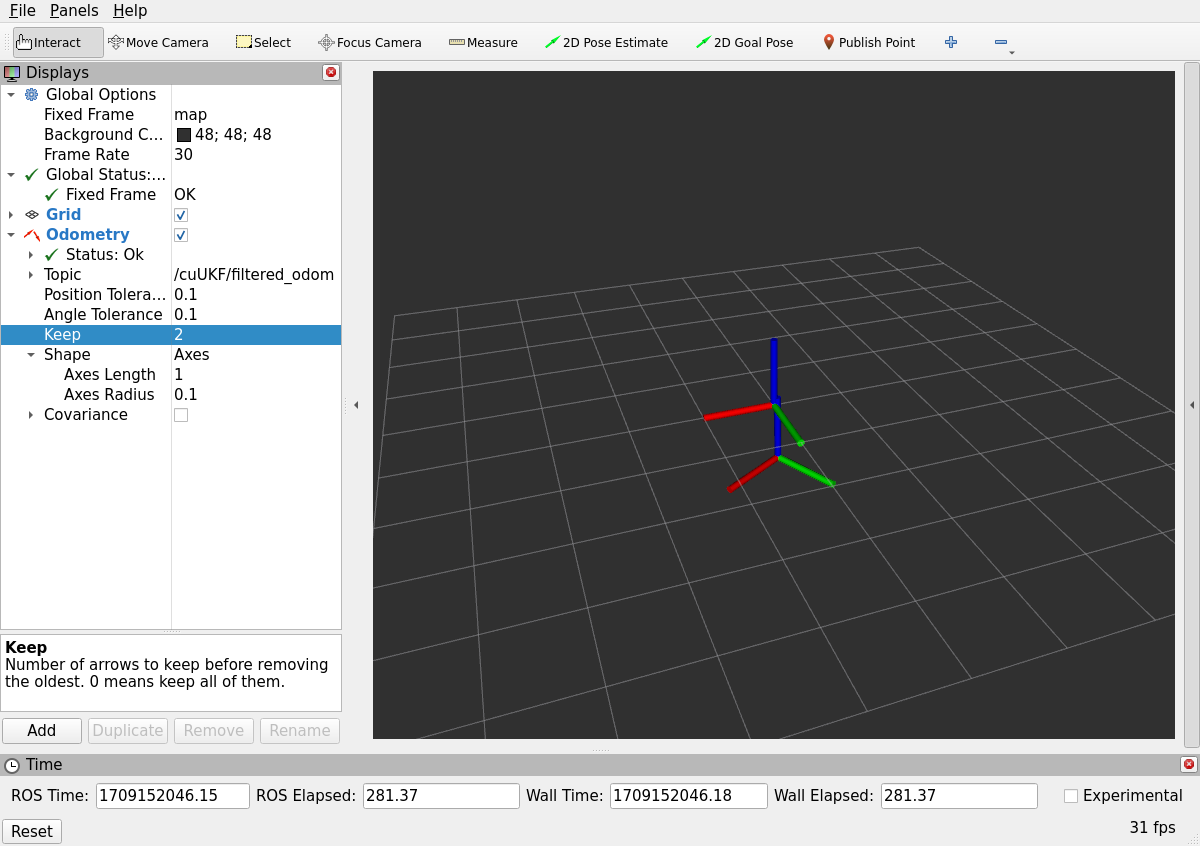
Odometry
Visualize the covariance of the state
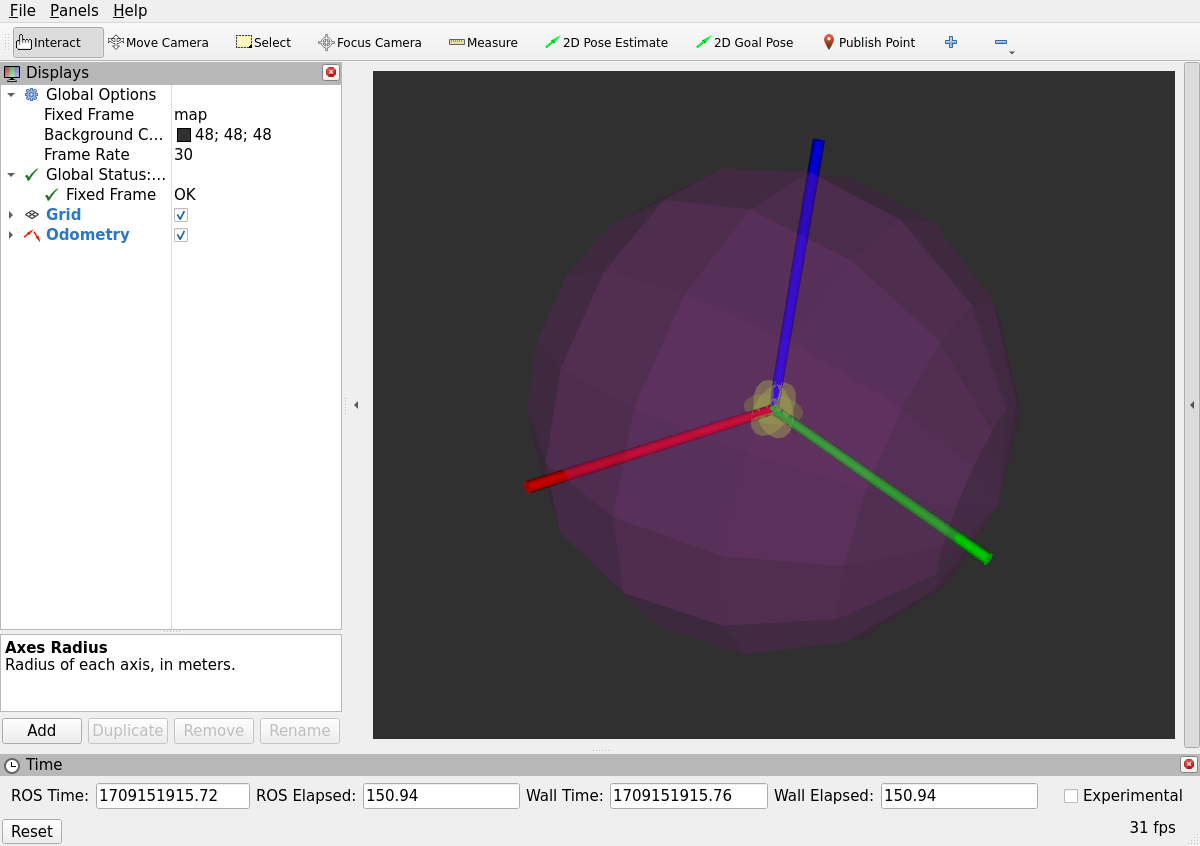
Covariance
⚠️ Note
1) The fusion does not consider the IMU’s orientation only the visual odometry’s orientation for the system dynamics and measurements, as raw IMU don’t produce orientation without additional filters such as complementary filter and the Madgwick filter.
2) Feel free to change the alpha, beta and kappa values along with the covariance to improve state estimation.
3) The dynamics of the system use simple equations, for the best fusion you may need to change the dynamics.
4) Consider adding augmented sigma points to further increase the robustness.
5) There is also a CPU version of the UKF for quick development and testing.
CONTRIBUTING
|
|
cuda-accelerated-visual-inertial-odometry-fusion repositoryrobotics cuda cublas unscented-kalman-filter sensor-fusion state-estimation kalman-filter visual-inertial-odometry ros2 visual-odometry cusolver imu-sensor |
|
|
|
|
cuda-accelerated-visual-inertial-odometry-fusion repositoryrobotics cuda cublas unscented-kalman-filter sensor-fusion state-estimation kalman-filter visual-inertial-odometry ros2 visual-odometry cusolver imu-sensor |
|
|
|
|
cuda-accelerated-visual-inertial-odometry-fusion repositoryrobotics cuda cublas unscented-kalman-filter sensor-fusion state-estimation kalman-filter visual-inertial-odometry ros2 visual-odometry cusolver imu-sensor |
|
|
|
|
cuda-accelerated-visual-inertial-odometry-fusion repositoryrobotics cuda cublas unscented-kalman-filter sensor-fusion state-estimation kalman-filter visual-inertial-odometry ros2 visual-odometry cusolver imu-sensor |
|
|