
Repository Summary
| Description | Digit 360 is a modular platform that unlocks new capabilities, and enables future research on the nature of touch. |
| Checkout URI | https://github.com/facebookresearch/digit360.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-06 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
README
Digit 360
Unlocking new capabilities, and enabling future research on the nature of touch.
Mike Lambeta, Tingfan Wu, Ali Sengül, Victoria Rose Most, Nolan Black, Kevin Sawyer, Romeo Mercado, Haozhi Qi, Chaithanya Krishna Bodduluri, Alexander Sohn, Byron Taylor, Norb Tydingco, Gregg Kammerer, Dave Stroud, Jake Khatha, Kurt Jenkins, Kyle Most, Neal Stein, Ricardo Chavira, Thomas Craven-Bartle, Eric Sanchez, Yitian Ding, Jitendra Malik, Roberto Calandra
![]()
Digit 360 is a modular platform which provides rich, multi-modal digital touch-sensing capabilities through a hemispherical compliant embodiment. Digit 360 contains high-resolution sensors (~8.3 million taxels) that respond to omnidirectional touch, capture multi-modal signals, and use on-device artificial intelligence to process the data in real time.

Call for Proposals
AI Research at Meta, in partnership with GelSight Inc., invites proposals from universities and research organizations interested in using the next generation touch sensor Digit 360 to accelerate research, drive open source development, and contribute to the open source community. Fully assembled Digit 360’s will be made available at no charge to researchers that will make rigorous and creative use of the sensor in existing or planned research projects.
Apply for the Call for Proposals.
Digit 360 Overview
The full description of the research methods is found in the Digit 360 paper
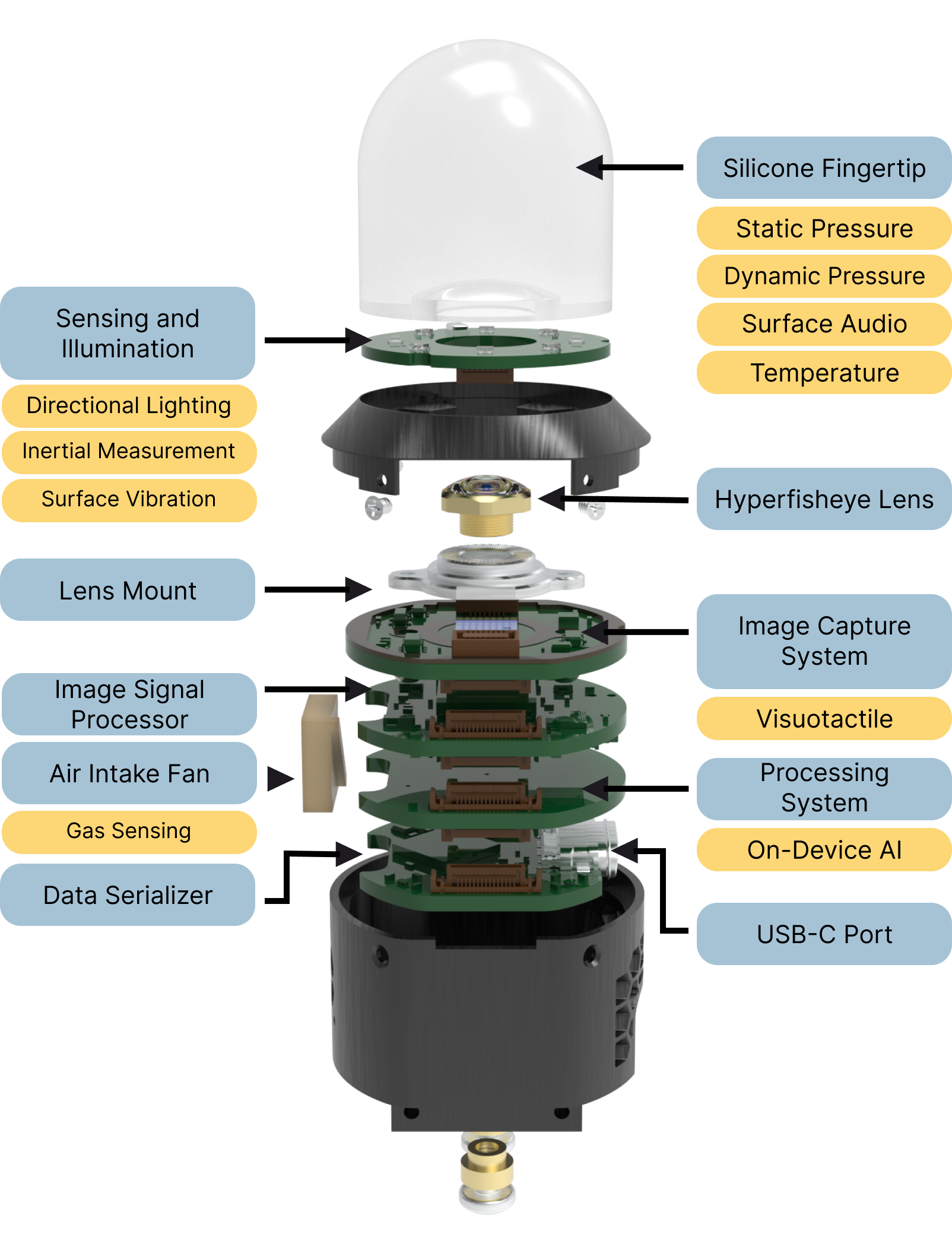
Digit 360 Design
Digit 360 is composed of a 5 printed circuit board (PCB) stack with a 2 part mechanical housing, a custom hyperfisheye lens, and an artificial fingertip.
See the design guidelines and design files README for additional information.
🛠️ Installation
Please follow the instructions in this doc to set up the environment and build the ROS2 package.
💻 Setup
We provide two methods for interacting with the Digit 360 devices.
1. Standalone Package
It provides python interface for accessing modalities output by digit360. Run the following command to test:
python digit360/interface/examples/test_usb.py
2. ROS2 Package
It provides ros2 interface to publish different modalities output by digit360. Run the following command to test:
ros2 launch d360 d360_min_launch.py
RL Environments and Simulation
To facilitate reinforcement learning environments, we provide a set of sectorized and convex meshes described in URDF formats found in the meshes folder.
 Both convex and sectorized meshes can be imported into [IsaacSim](https://developer.nvidia.com/isaac/sim).
Both convex and sectorized meshes can be imported into [IsaacSim](https://developer.nvidia.com/isaac/sim).
💡 Multimodal Classification
We provide an example on how to run material / action classifications on touch interactions using the Digit 360.
Please check out this doc for the detailed instructions.
Related Works using Digit 360
- In-Hand Object Rotation via Rapid Motor Adaptation, Haozhi Qi et al.
- General In-Hand Object Rotation with Vision and Touch, Haozhi Qi et al.
📚 Citing Digit 360
If you find this repository useful, please consider giving a star :star: and citation:
@inproceedings{lambeta2024digit360,
title={Digitizing Touch with an Artificial Multimodal Fingertip},
author={Mike Lambeta, Tingfan Wu, Ali Sengul, Victoria Rose Most, Nolan Black, Kevin Sawyer, Romeo Mercado, Haozhi Qi, Alexander Sohn, Byron Taylor, Norb Tydingco, Gregg Kammerer, Dave Stroud, Jake Khatha, Kurt Jenkins, Kyle Most, Neal Stein, Ricardo Chavira, Thomas Craven-Bartle, Eric Sanchez, Yitian Ding, Jitendra Malik, Roberto Calandra},
booktitle = {arXiv},
year = {2024}
}
License
This project is licensed under LICENSE.
CONTRIBUTING
Contributing to Digit 360
We want to make contributing to this project as easy and transparent as possible.
Pull Requests
We actively welcome your pull requests.
- Fork the repo and create your branch from
main. - If you’ve added code that should be tested, add tests.
- If you’ve changed APIs, update the documentation.
- Ensure the test suite passes.
- Make sure your code lints.
- If you haven’t already, complete the Contributor License Agreement (“CLA”).
Contributor License Agreement (“CLA”)
In order to accept your pull request, we need you to submit a CLA. You only need to do this once to work on any of Meta’s open source projects.
Complete your CLA here: https://code.facebook.com/cla
Issues
We use GitHub issues to track public bugs. Please ensure your description is clear and has sufficient instructions to be able to reproduce the issue.
Meta has a bounty program for the safe disclosure of security bugs. In those cases, please go through the process outlined on that page and do not file a public issue.
License
By contributing to Digit 360, you agree that your contributions will be licensed under the LICENSE file in the root directory of this source tree.