
No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
|
|
Repository Summary
| Description | About Demo of CR/Nova ; Dobot V3 version ROS2 |
| Checkout URI | https://github.com/dobot-arm/dobot_6axis_ros2_v3.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-06 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| cr10_moveit | 0.3.0 |
| cr12_moveit | 0.3.0 |
| cr16_moveit | 0.3.0 |
| cr3_moveit | 0.3.0 |
| cr5_moveit | 0.3.0 |
| cr7_moveit | 0.3.0 |
| cra_description | 0.0.0 |
| dobot_bringup_v3 | 0.0.0 |
| dobot_demo | 0.0.0 |
| dobot_gazebo | 0.0.0 |
| dobot_moveit | 0.0.0 |
| dobot_msgs_v3 | 0.0.0 |
| dobot_rviz | 0.0.0 |
| nova2_moveit | 0.3.0 |
| nova5_moveit | 0.3.0 |
| servo_action | 0.0.0 |
README
ROS-Robot
1. 简介
DOBOT_6Axis-ROS2_V3 是为 Dobot 公司旗下基于TCP/IP协议的ROS的封装设计的软件开发套件。它基于 ROS/C++、python语言开发,遵循Dobot-TCP-IP控制通信协议,通过socket与机器终端进行Tcp连接, 并为用户提供了易用的api接口。通过 DOBOT_6Axis-ROS2_V3,用户可以快速地连接Dobot机器并进行二次开发对机器的控制与使用。
前置依赖
-
电脑可用网线连接控制器的网口,然后设置固定 IP,与控制器 IP 在同一网段下。也可无线连接控制器。
有线连接时连接LAN1:ip为192.168.5.1, 有线连接时连接LAN2:ip为192.168.100.1, 无线连接:ip为192.168.1.6
- 尝试 ping 通控制器 IP,确保在同一网段下。
- Ubuntu 22.04
运行步骤
1. 源码编译
下载源码
mkdir -p ~/dobot_ws/src
cd ~/dobot_ws/src
git clone https://github.com/Dobot-Arm/DOBOT_6Axis_ROS2_V3.git
cd ~/catkin_ws
编译
colcon build
source install/local_setup.sh
设置环境变量
echo "source ~/dobot_ws/install/local_setup.sh" >> ~/.bashrc
设置机械臂连接IP
echo "export IP_address=192.168.5.1" >> ~/.bashrc
source ~/.bashrc
若为 CR3 机械臂,则使用如下命令设置机械臂类型
echo "export DOBOT_TYPE=cr3" >> ~/.bashrc
source ~/.bashrc
若为 CR5 机械臂,则使用如下命令设置机械臂类型
echo "export DOBOT_TYPE=cr5" >> ~/.bashrc
source ~/.bashrc
若为 CR10 机械臂,则使用如下命令设置机械臂类型
echo "export DOBOT_TYPE=cr10" >> ~/.bashrc
source ~/.bashrc
若为 CR16 机械臂,则使用如下命令设置机械臂类型
echo "export DOBOT_TYPE=cr16" >> ~/.bashrc
source ~/.bashrc
若为 Nova2 机械臂,则使用如下命令设置机械臂类型
echo "export DOBOT_TYPE=nova2" >> ~/.bashrc
source ~/.bashrc
若为 Nova5 机械臂,则使用如下命令设置机械臂类型
echo "export DOBOT_TYPE=nova5" >> ~/.bashrc
source ~/.bashrc
2. 使用演示
在仿真环境下使用
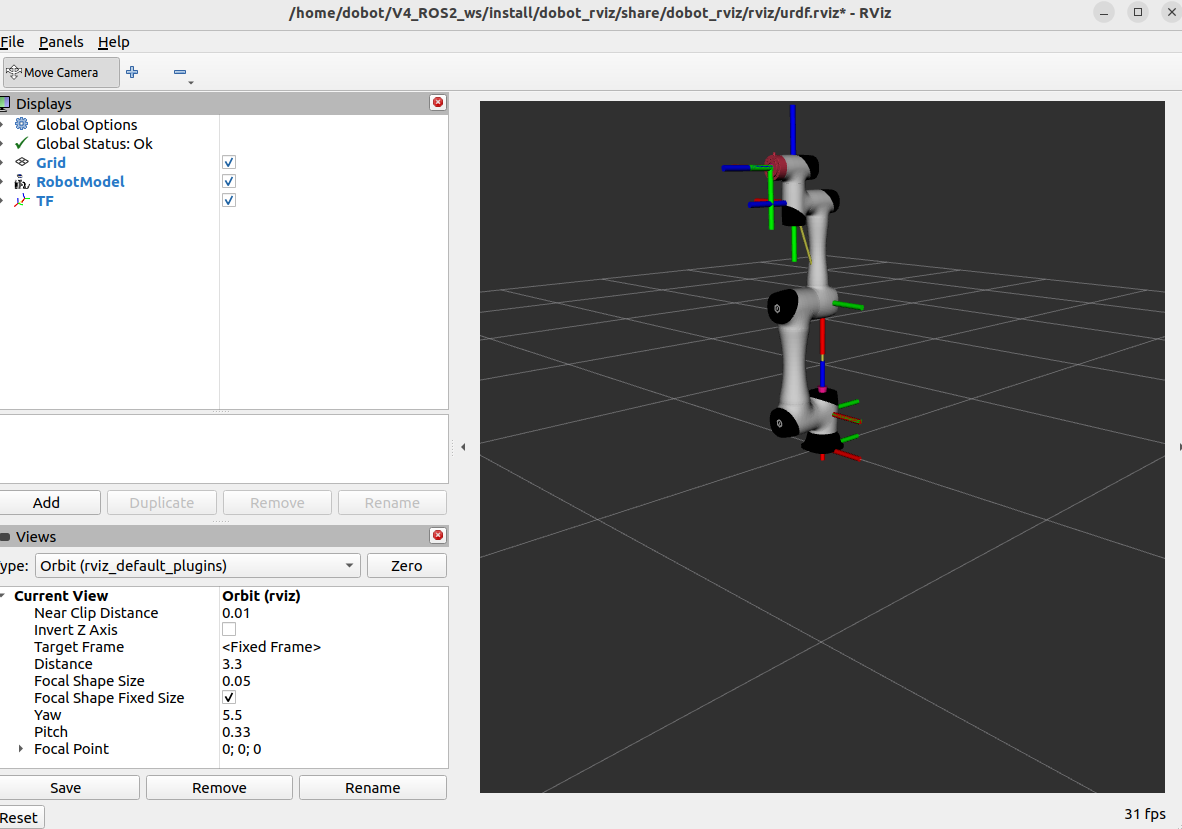
rviz 显示
ros2 launch dobot_rviz dobot_rviz.launch.py
可通过加载 joint_state_publisher_gui 调节各关节的角度,在 rviz 上看到其显示效果
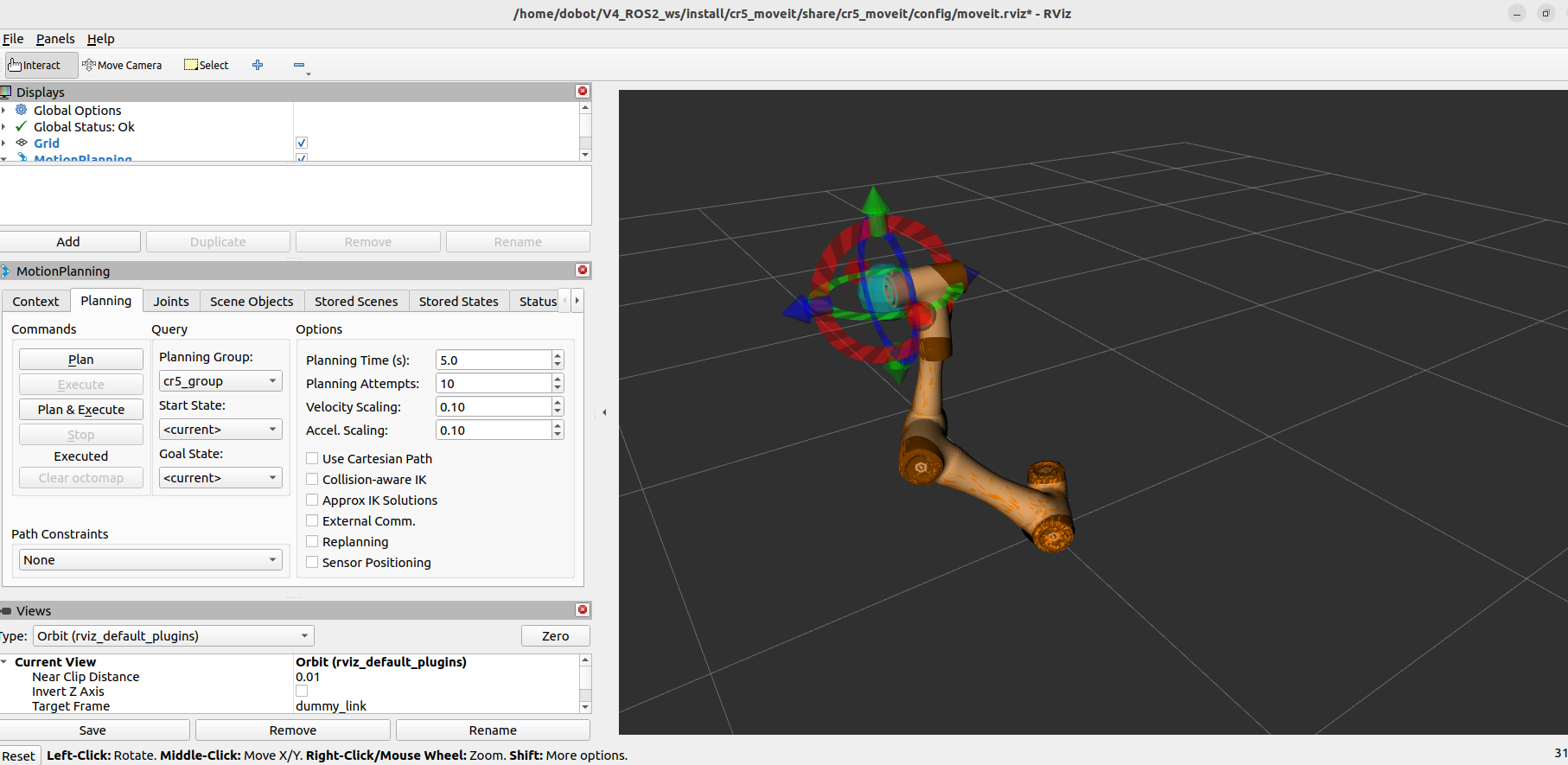
moveit 控制
- 使用如下命令启动 moveit
ros2 launch dobot_moveit dobot_moveit.launch.py
- 鼠标将关节拖到任意的角度,点击 “Plan and Execute” 即可看到运行效果
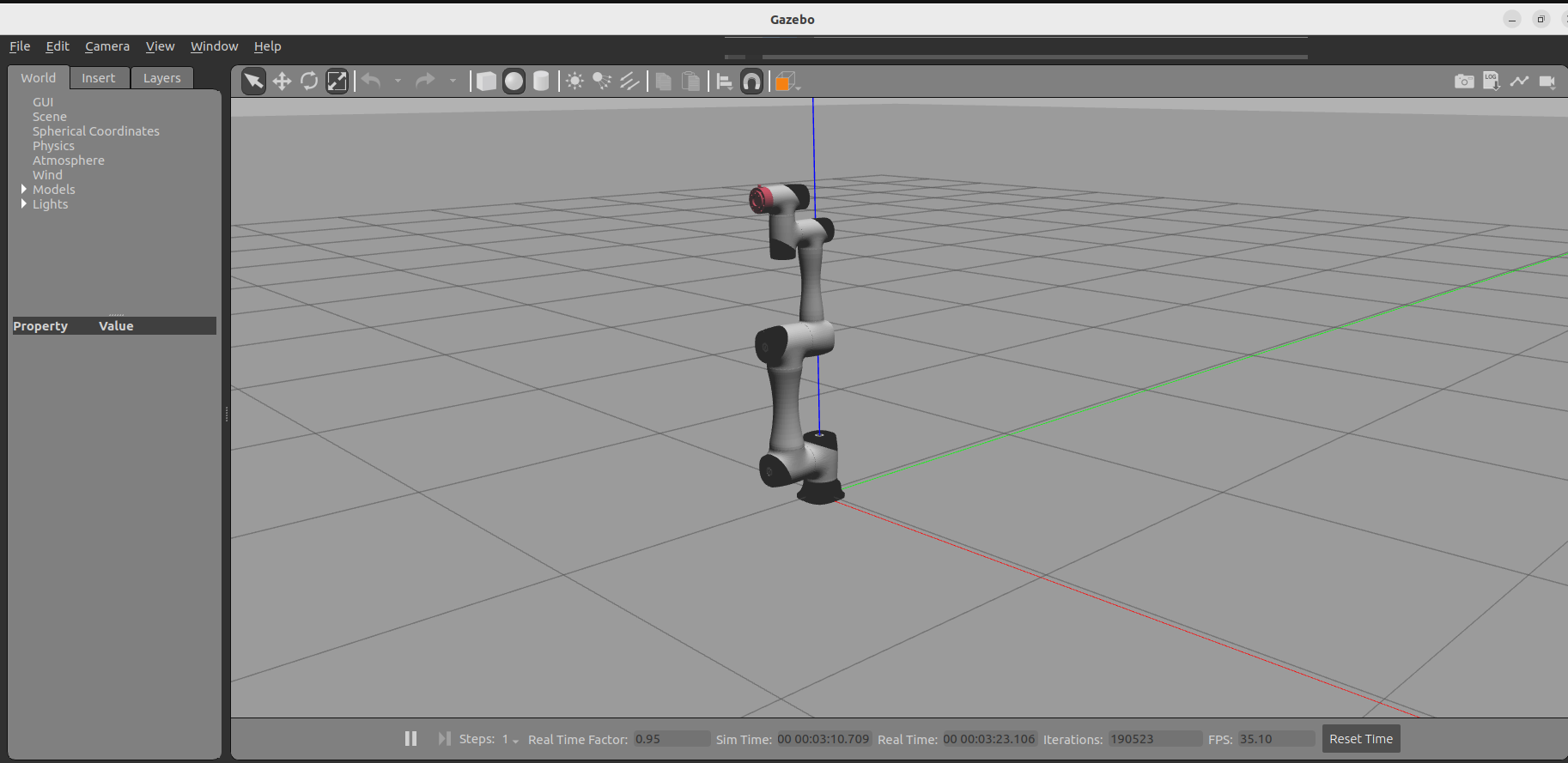
gazebo 仿真
- 使用如下命令启动 gazebo
ros2 launch dobot_gazebo dobot_gazebo.launch.py
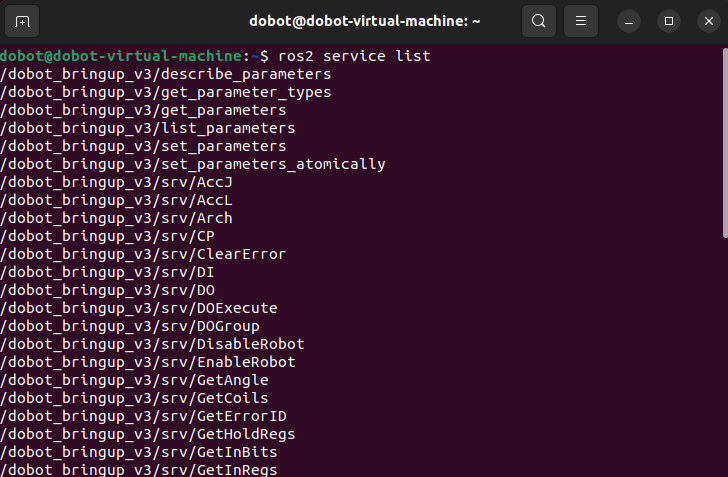
控制真实机械臂
- 使用如下命令连接机械臂
ros2 launch dobot_bringup_v3 dobot_bringup_ros2.launch.py
- 使用如下命令查看服务
ros2 service list
CONTRIBUTING
No CONTRIBUTING.md found.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro ardent. Known supported distros are highlighted in the buttons above.
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
No version for distro crystal. Known supported distros are highlighted in the buttons above.
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
No version for distro dashing. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro foxy. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro lunar. Known supported distros are highlighted in the buttons above.
No version for distro jade. Known supported distros are highlighted in the buttons above.
No version for distro indigo. Known supported distros are highlighted in the buttons above.
No version for distro hydro. Known supported distros are highlighted in the buttons above.
No version for distro kinetic. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.