
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro humble. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro rolling. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 eddiebot_bringup eddiebot_description eddiebot_gazebo eddiebot_msgs eddiebot_nav eddiebot_odom eddiebot_rviz eddiebot_vel_controller |
|
|
Repository Summary
| Description | ROS2 packages for Parallax Eddie robot along with simulations using Gazebo (formerly ignition gazebo) |
| Checkout URI | https://github.com/arashsm79/eddiebot-ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-02-28 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | navigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| eddiebot_bringup | 0.0.0 |
| eddiebot_description | 0.0.0 |
| eddiebot_gazebo | 0.0.0 |
| eddiebot_msgs | 0.0.0 |
| eddiebot_nav | 0.0.0 |
| eddiebot_odom | 0.0.0 |
| eddiebot_rviz | 0.0.0 |
| eddiebot_vel_controller | 0.0.0 |
README
Eddiebot ROS
ROS2 packages for Parallax Eddie robot along with simulations using Gazebo (formerly ignition gazebo)
For an in depth tutorial on how to use this package check out the accompanying tutorial: robotics lab
Packages
- eddiebot_bringup: The driver for the Eddie robot board. It establishes a connection to the board using UART and acts as a bridge between ROS2 and Eddie commands that the firmware on the board understands. For more details about the commands please checkout the documentation directory.
-
eddiebot_description: This package defines structure of the robot using URDF modelsf for every component of the robot. These models are used for generating kinematic and tf information. It uses the
diff_driveplugin for differential drive control of the robot. The launch files startrobot_state_publisherthat reads the URDF model and generates static TF transforms, andjoint_state_publisherthat sends out dynamic TF transforms for joint position updates. - eddiebot_gazebo: Contains some sample worlds to test the robot in, along with a bunch of launch files that are able to setup Gazebo, spawn Eddie into the world, and necessary bridges for ROS2 and Gazebo communication.
- eddiebot_nav: Contains the launch files for the setup and launch of the navigation stack using nav2, slam_toolbox, depthimage_to_laserscan, and various other packages.
- eddiebot_msgs: Definition of specific topics and services for Eddie robot.
-
eddiebot_odom: Publishes odometry information useful for mapping and localization. It publishes the transform between the frames
/odomand/base_footprint. - eddiebot_rviz: Rviz configurations and launch files for visualizing and monitoring various aspects of Eddie.
- eddiebot_vel_controller: A converter between different velocity types.
Screeenshots
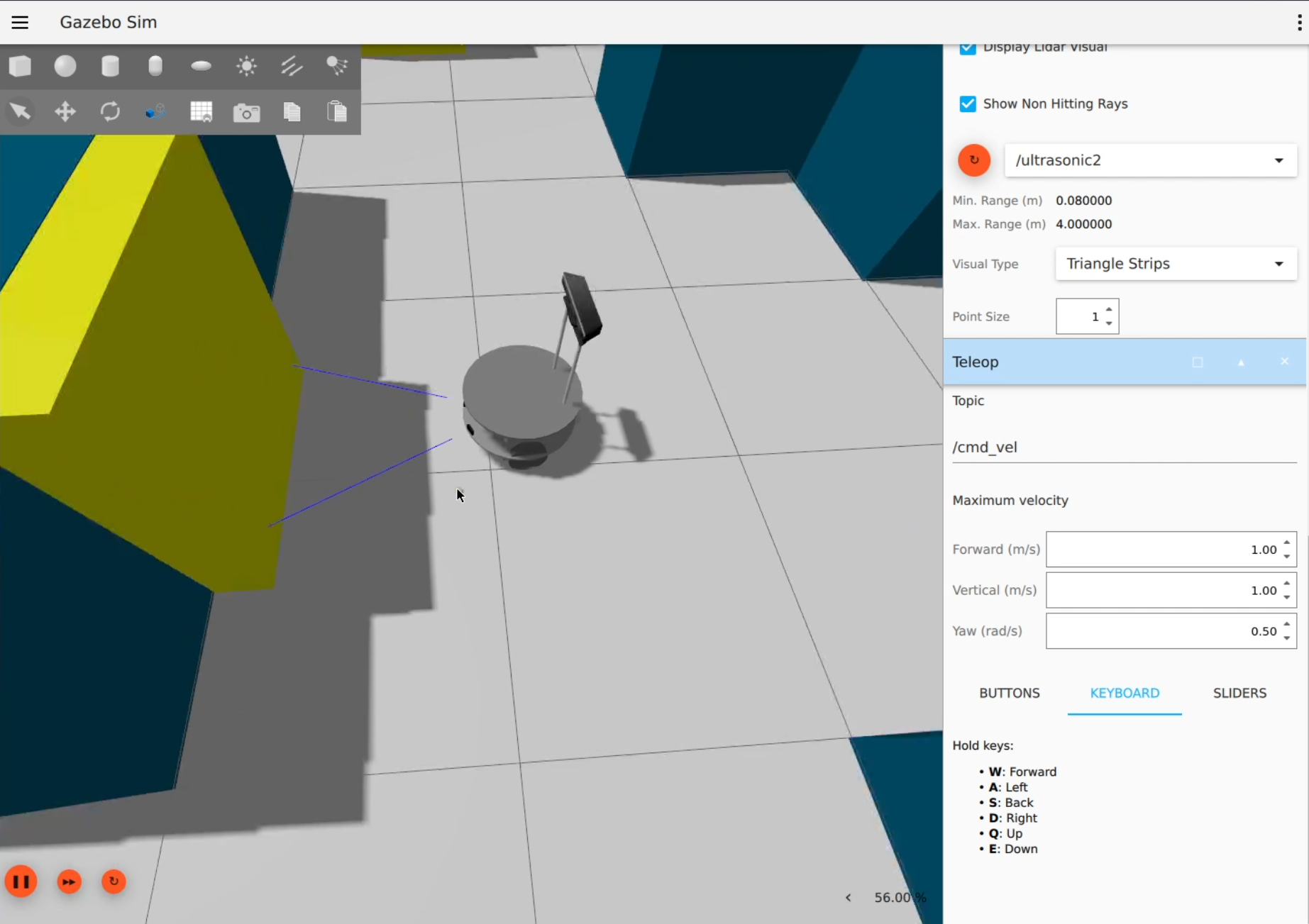
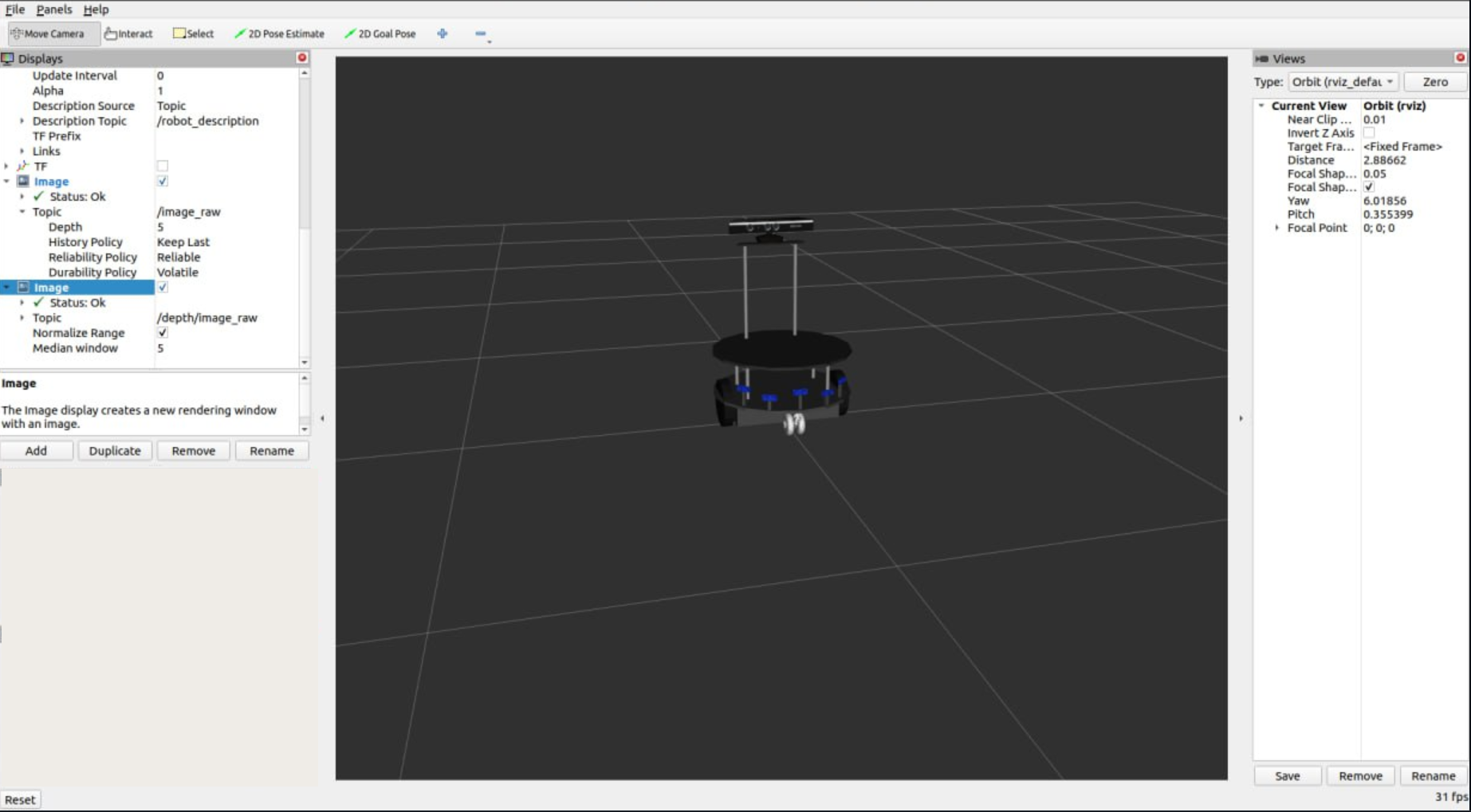
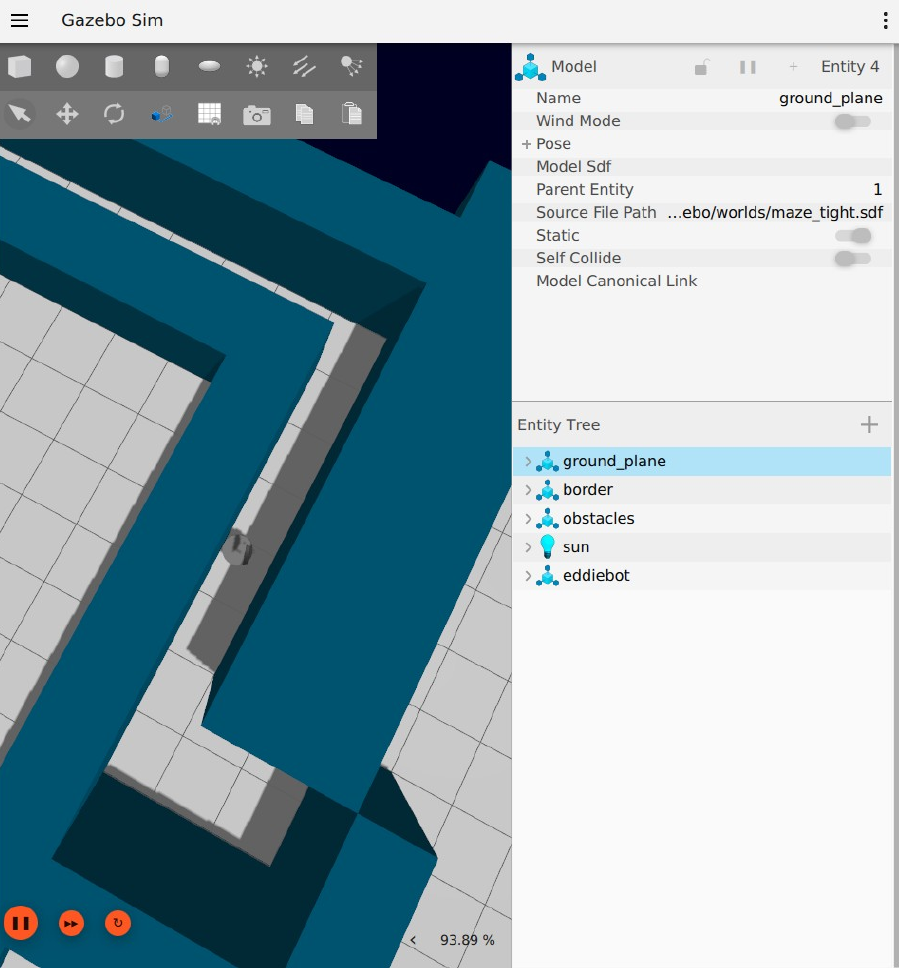
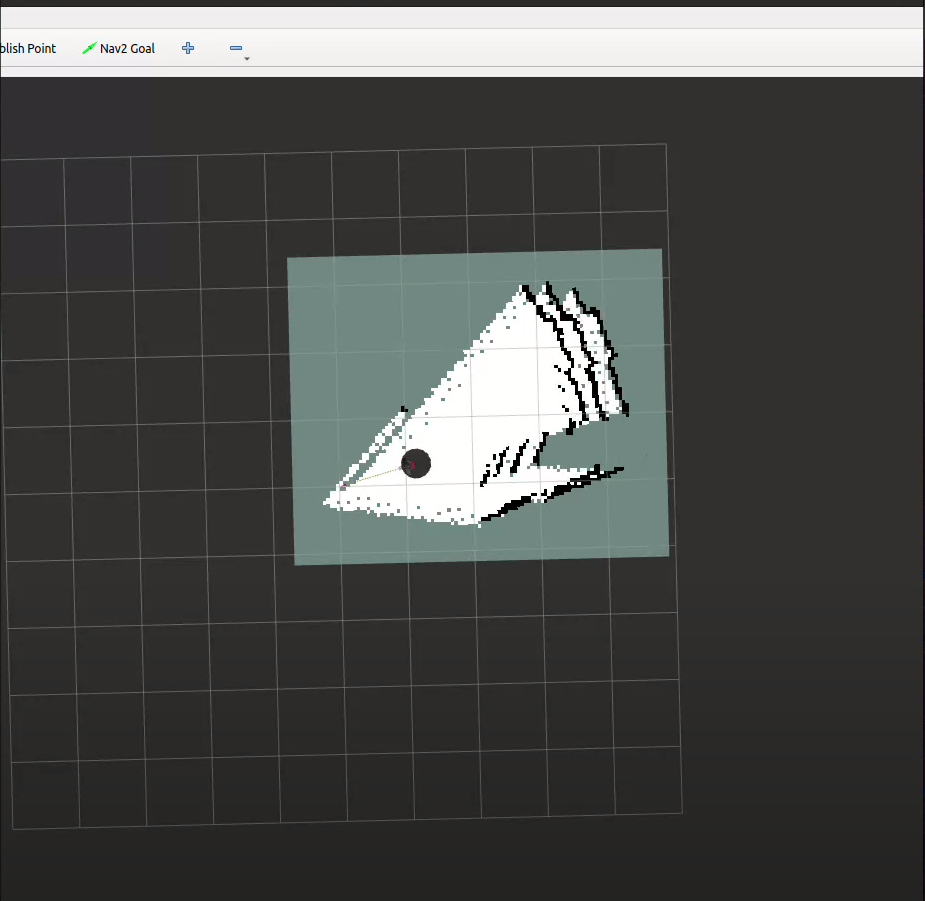
https://github.com/arashsm79/eddiebot-ros/assets/57039957/af5bc3b8-e1a9-4ce3-84b5-ed4566440294
Features
- How to convert a legacy ROS1 codebase to ROS2
- Example of hooks for setting GZ_SIM_RESOURCE_PATH
- Robot description launch with robot_state_publisher, joint_state_publisher, and joint_state_publisher_gui
- Kinect, Depth, Ultrasonic and infrared sensors in new Gazebo (
gpu_lidar,gz::sim::systems::Sensors,rgbd_camera,gz-sim-sensors-system) - Use of
gz-sim-diff-drive-systemgz::sim::systems::DiffDrivefor differential drive control. - Employing xacro files for easier management of robot structure defitnition.
- Launch files for launching Gazebo and Spawning a robot using
ros_gz_simandros_gz - Use of
pointcloud_to_laserscanfor depth camera. - Examples of
ros_gz_bridgefor bridging ROS2 with Gazebo. - Modern nav2, slam_toolbox, and rtabmap launch and configuration files.
- Computation and publishing of odometry.
- rviz launch files with proper TF transformation along with different configuration files.
- Use of the new Gazebo (formerly ignition gazebo)
CONTRIBUTING
No CONTRIBUTING.md found.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro noetic. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro ardent. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro crystal. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro dashing. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro galactic. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro foxy. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro iron. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro lunar. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro jade. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro indigo. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro hydro. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro kinetic. Known supported distros are highlighted in the buttons above.
|
|
eddiebot-ros repositorynavigation gazebo urdf slam odometry eddie turtlebot ros2 differential-drive bringup parallex rtabmap rviz2 ignition-gazebo slam-toolbox nav2 |
|
|
No version for distro melodic. Known supported distros are highlighted in the buttons above.