No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
eskf-gnss-imu-localization repositoryopengl localization ros2 error-state-kalman-filter eskf_gnss_imu_localization |
|
|
Repository Summary
| Description | GNSS-IMU Localization based on Error-State Kalman Filter |
| Checkout URI | https://github.com/limhaeryong/eskf-gnss-imu-localization.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-12-18 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | opengl localization ros2 error-state-kalman-filter |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| eskf_gnss_imu_localization | 0.0.0 |
README
ESKF BASED GNSS-IMU LOCALIZATION
This repository contains GNSS-IMU Localization based on Error-State Kalman Filter.
The implementation of ESKF is based on Quaternion kinematics for the error-state Kalman filter.
OpenGL is used to visualize GNSS/Filtered Position in realtime and 3D space.
Installation
Dependencies
- Ubuntu 20.04
- ROS2(foxy)
- Eigen3
- GeographicLib
- yaml-cpp
- OpenGL
- nmea_msgs(ROS package)
- nmea_navsat_driver(ROS package)
Install EU Long-term Dataset with Multiple Sensors for Autonomous Driving
EU Long-term Dataset with Multiple Sensors for Autonomous Driving

Convert rosbag1 to rosbag2
rosbags-convert utbm_robocar_dataset_20190131_noimage.bag
Clone the repository
cd /your/workspace/src
git clone https://github.com/LimHaeryong/eskf-gnss-imu-localization.git
Modify rosbag path
- modify launch/eskf_gnss_imu_localization.launch.py
play_rosbag = ExecuteProcess(
cmd=['ros2', 'bag', 'play', 'change/to/your/rosbag/path']
)
Colcon Build
cd /your/workspace
colcon build
source ./install/local_setup.bash
How to run
ros2 launch eskf_gnss_imu_localization eskf_gnss_imu_localization.launch.py
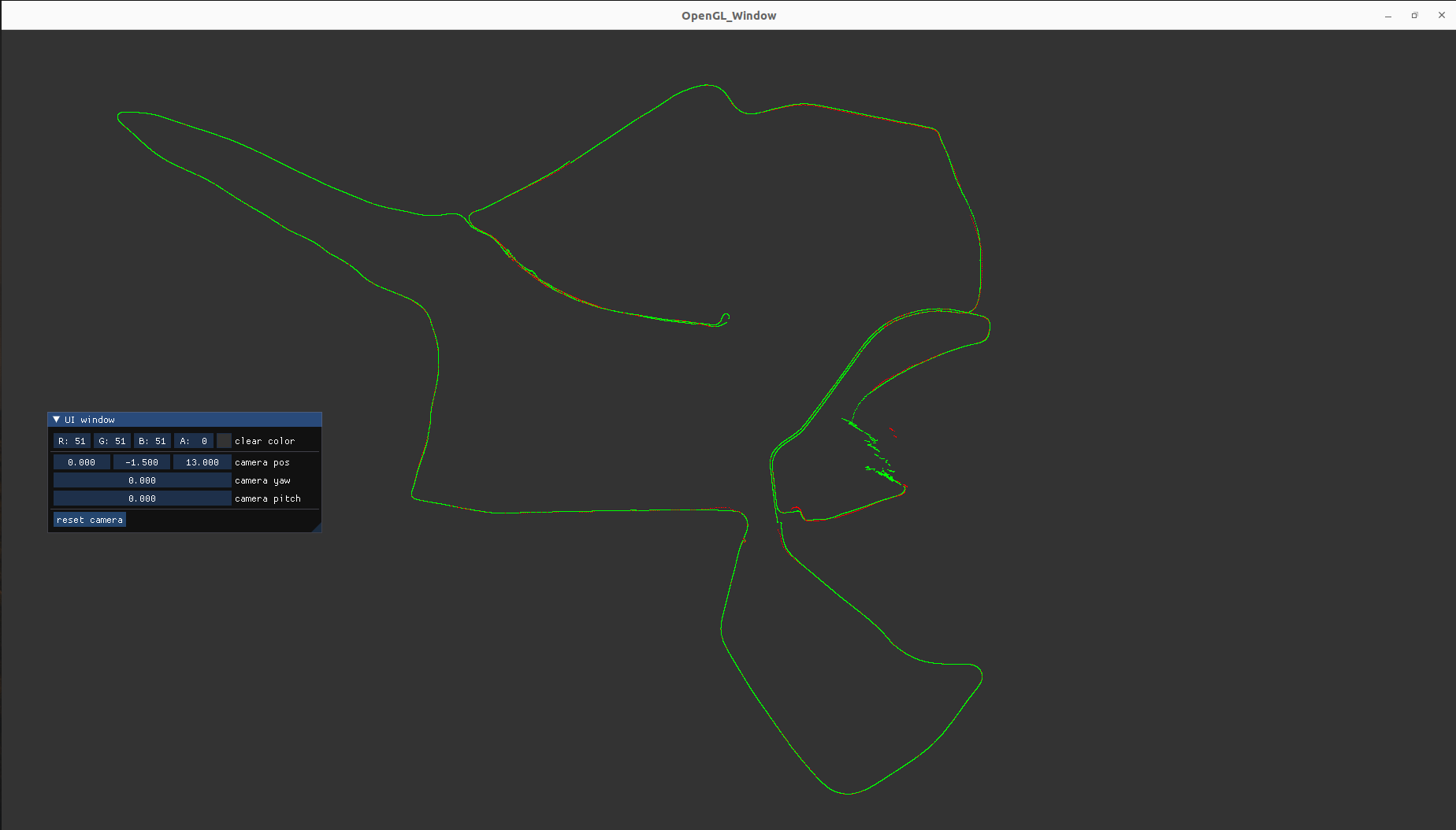
Result
- GNSS position(Red)
- Filtered position(Green)
CONTRIBUTING
No CONTRIBUTING.md found.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.