
No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | Error State Kalman Filter based Loosely-Coupled Lidar-IMU Odometry |
| Checkout URI | https://github.com/limhaeryong/eskf_lio.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-09-08 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | open3d lidar-imu-odometry ros2-humble |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| eskf_lio | 0.0.0 |
README
ESKF-LIO
This repository contains Loosely coupled Lidar-IMU Odometry based on Error-State Kalman Filter.
The implementation of ESKF is based on Quaternion kinematics for the error-state Kalman filter.
Key Features:
- Utilizes a Voxel Grid based on a hash table to store local map points.
- Uses a Voxelized GICP for Registration.
Installation
Dependencies
- Ubuntu 22.04
- ROS2(humble)
- Open3d
- Yaml-cpp
- Eigen3
- OpenMP
Download HILTI-OXFORD Dataset
- Download Exp21 Outside Building

Convert rosbag1 to rosbag2
rosbags-convert exp21_outside_building.bag
Clone the repository
cd /your/workspace/src
git clone https://github.com/LimHaeryong/ESKF_LIO.git
Modify rosbag path
- modify launch/eskf_lio.launch.py
play_rosbag = ExecuteProcess(
cmd=['ros2', 'bag', 'play', 'change/to/your/rosbag/path']
)
Colcon Build
cd /your/workspace
colcon build
source ./install/local_setup.bash
How to run
- Odometry
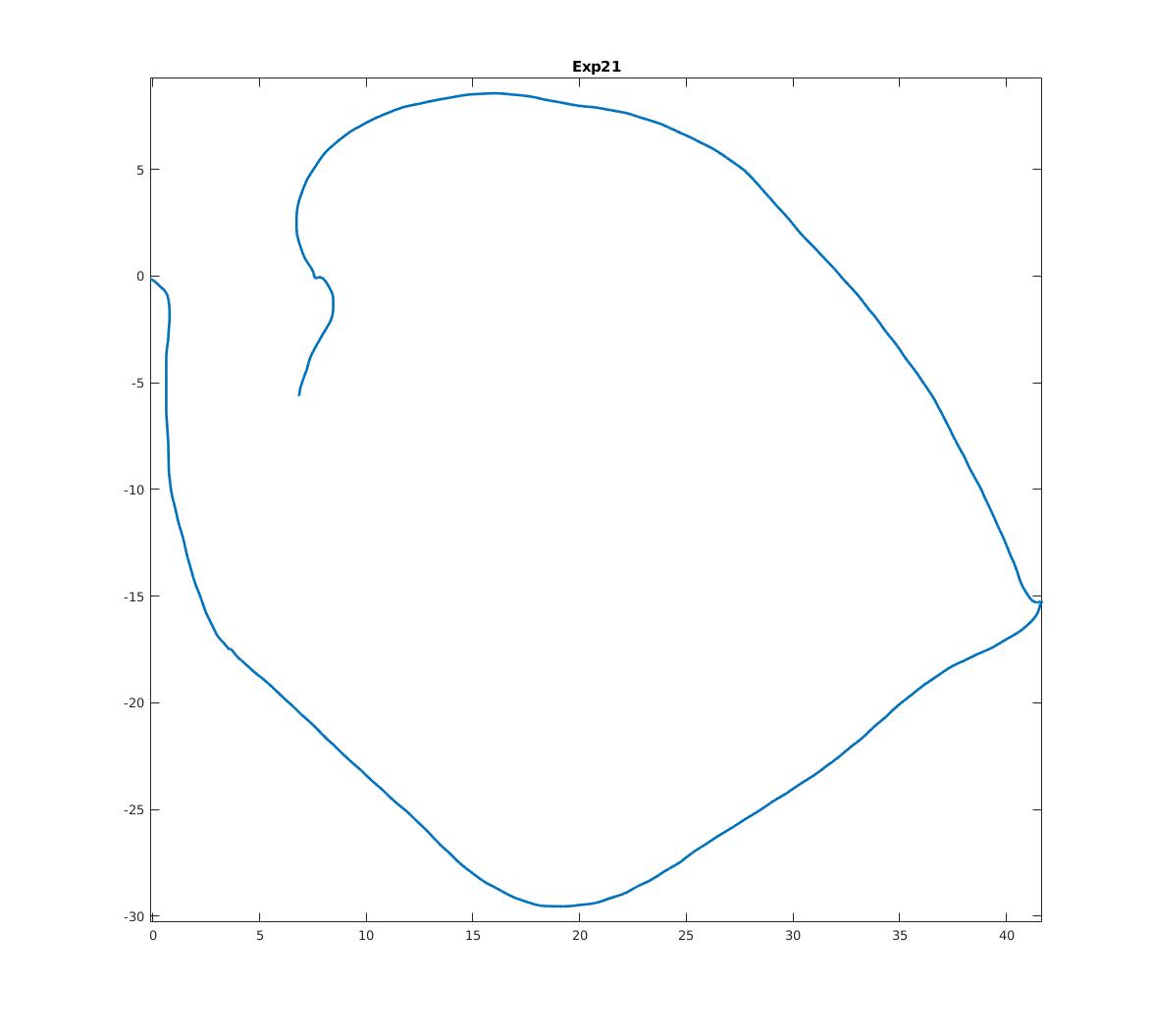
It generates the odometry information, including the point cloud map (map_cloud.pcd) and trajectory data (trajectory.json), which will be created in the “resources” directory.
ros2 launch eskf_lio eskf_lio.launch.py
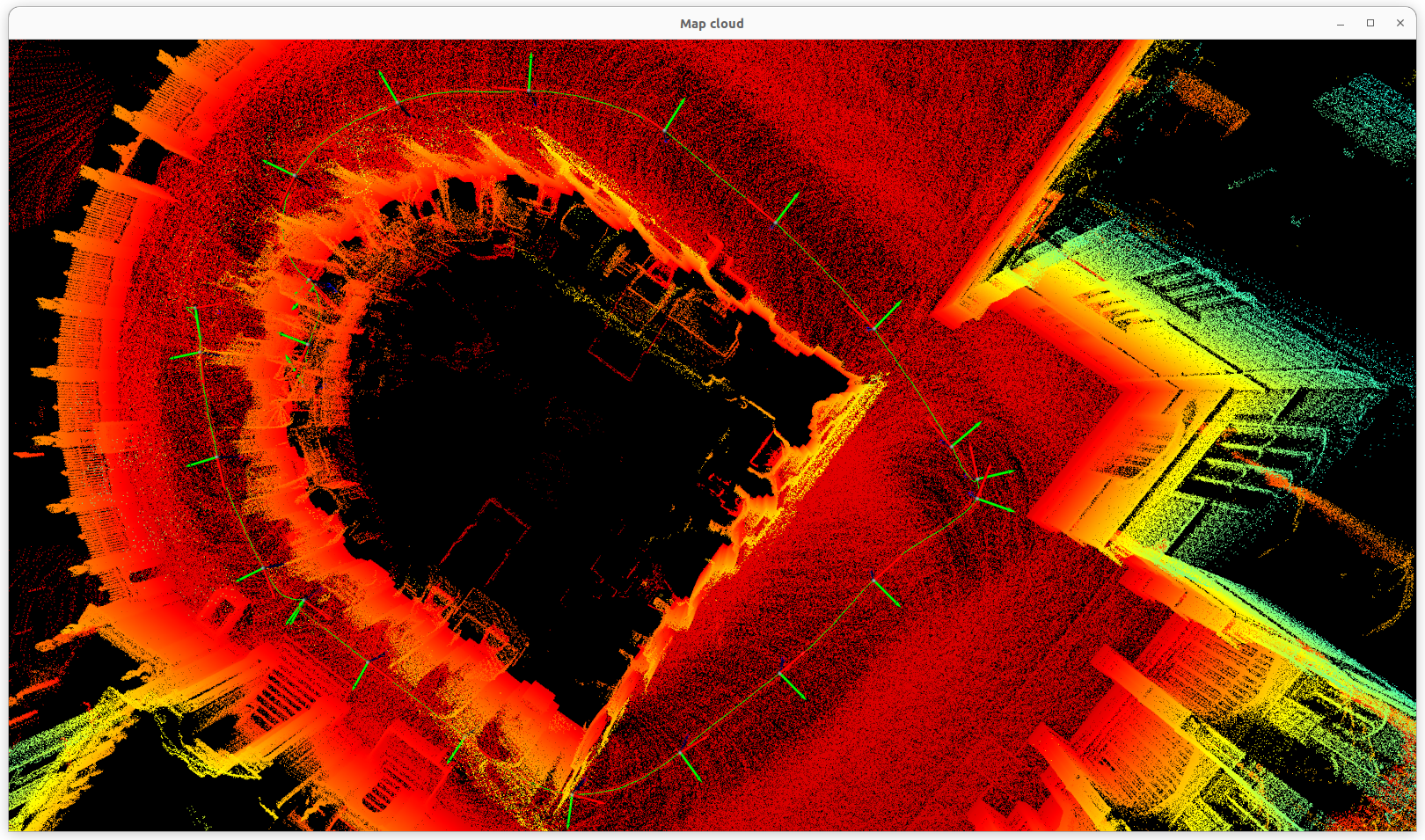
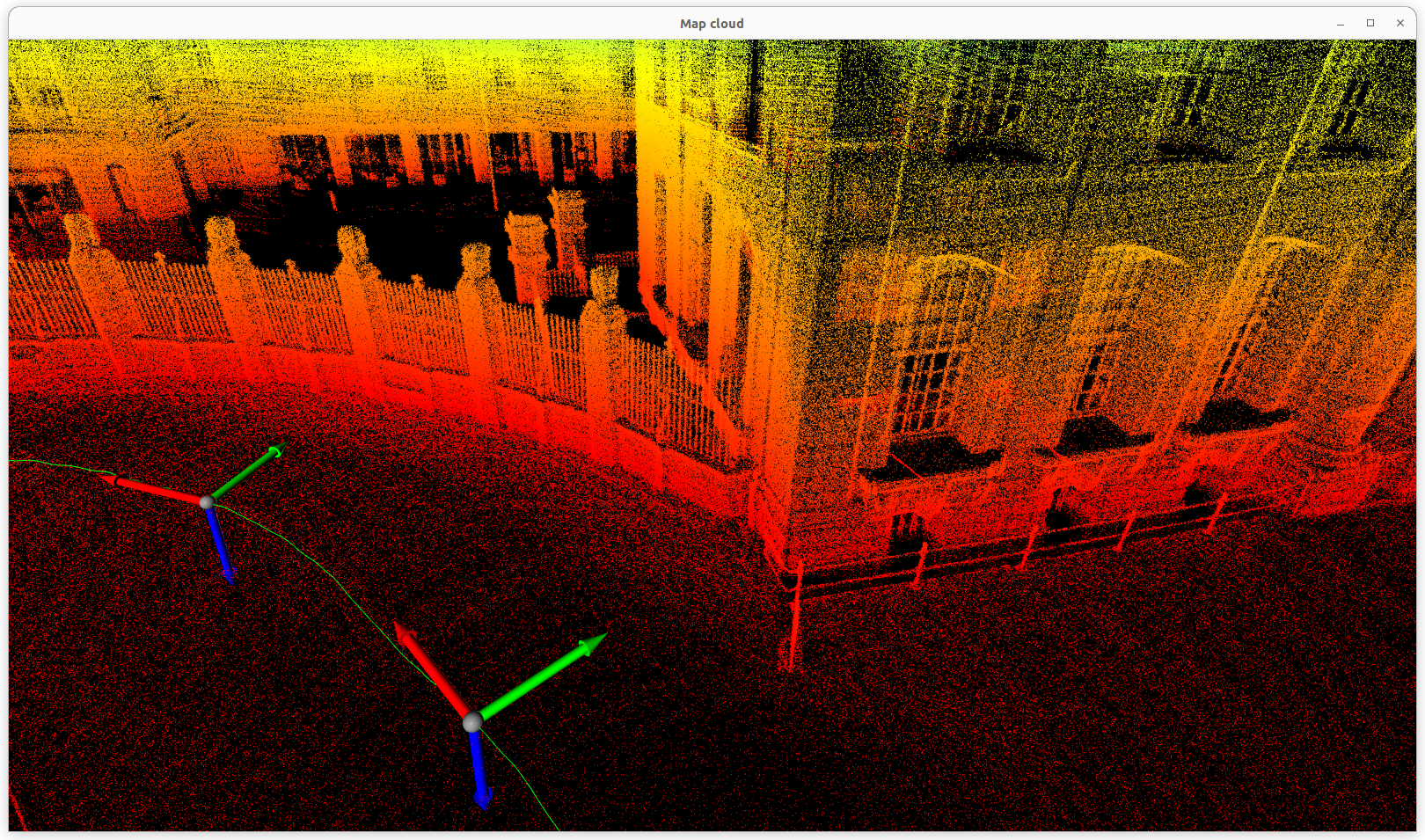
- Visualize Map Cloud
ros2 run eskf_lio eskf_lio_visualize_map_cloud
Result
CONTRIBUTING
No CONTRIBUTING.md found.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.