
Repository Summary
| Description | fake joint driver for ros_control framework |
| Checkout URI | https://github.com/tork-a/fake_joint.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-01-26 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| fake_joint | 0.0.4 |
| fake_joint_driver | 0.0.4 |
| fake_joint_launch | 0.0.4 |
README
fake_joint 
What is this?
This repositry contains the packages for simulating ‘fake’ (i.e. dummy or loop-back) joint driver for the ros_control framework.
Why we need this?
You may know MoveIt! has own controller manager and
moveit_fake_controller to simulate the robot motion. However, the
interface and code are different from ros_control framework. We have
experienced our jog_control
package doesn’t work with moveit_fake_controller while it works fine
with ros_control. One solution is to make ‘fake’ joint driver for
ros_control and not to use moveit_fake_controller.
You can simulate the joint controller using gazebo plugin. However, sometimes it is overkill for the purpose. Gazebo is rather CPU consuming for powerless PC or CI environments. And not all of the robot support gazebo model.
When some problems occured, say in MoveIt!, it could be difficult to
know whether the problem is from MoveIt! setting or joint controller
parameters. fake_joint guarantees the controller works perfectly,
means it simulates the precice motion as commended. This package
eliminates the possibility of controller side in your debugging.
Quick start
‘fake_joint_launch’ contains some launch and config files for several robots. You can easily try this package. They simulate real robot interface like joint trajectory action, so you can use MoveIt! on it.
UR3/UR5
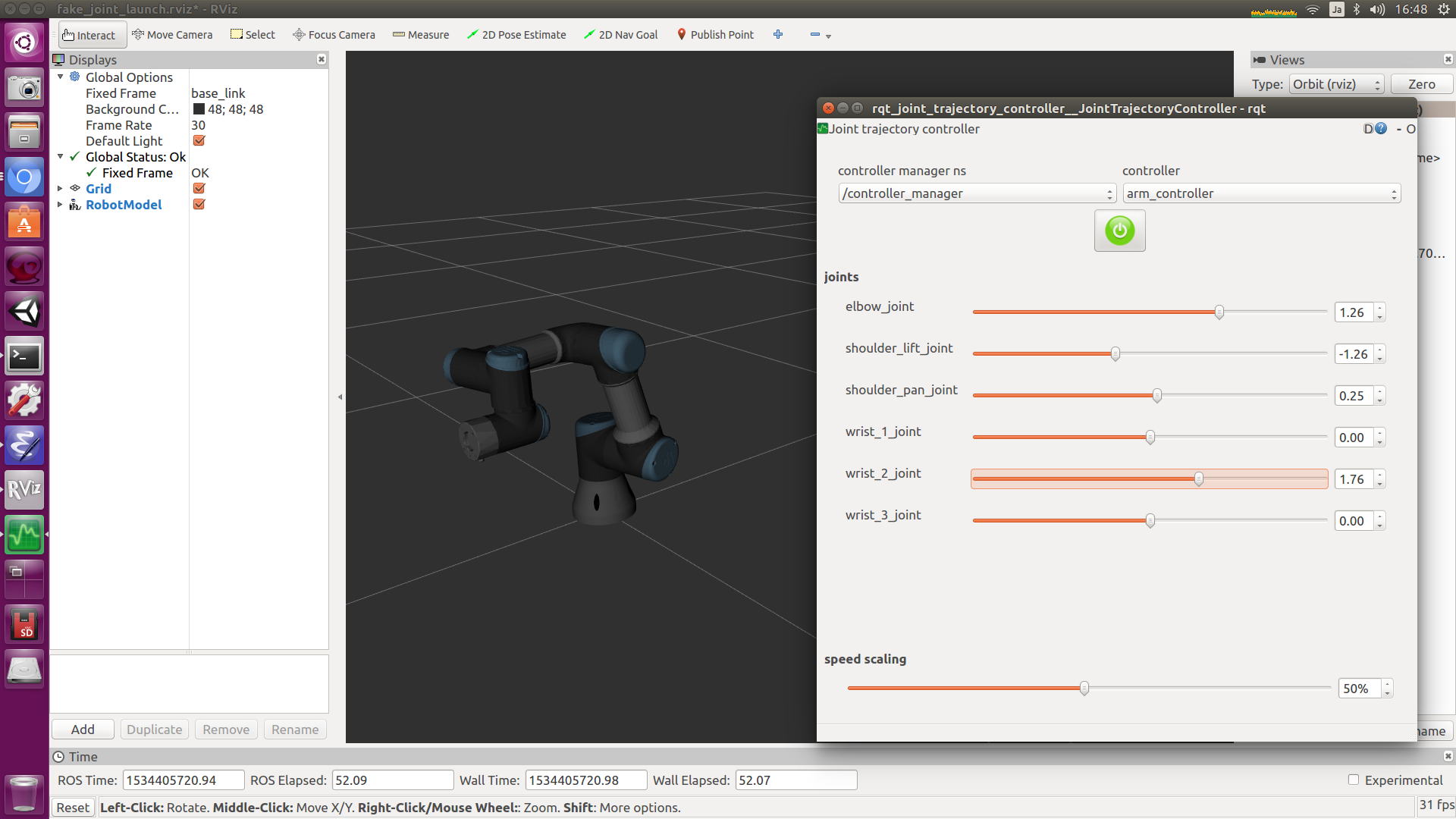
To use just fake driver and rqt plugin:
$ roslaunch fake_joint_launch ur3.launch use_rqt:=true
To use fake driver and MoveIt!:
$ roslaunch fake_joint_launch ur3.launch use_rviz:=false
$ roslaunch ur3_moveit_config ur3_moveit_planning_execution.launch sim:=true
$ roslaunch ur3_moveit_config moveit_rviz.launch config:=true
TRA1
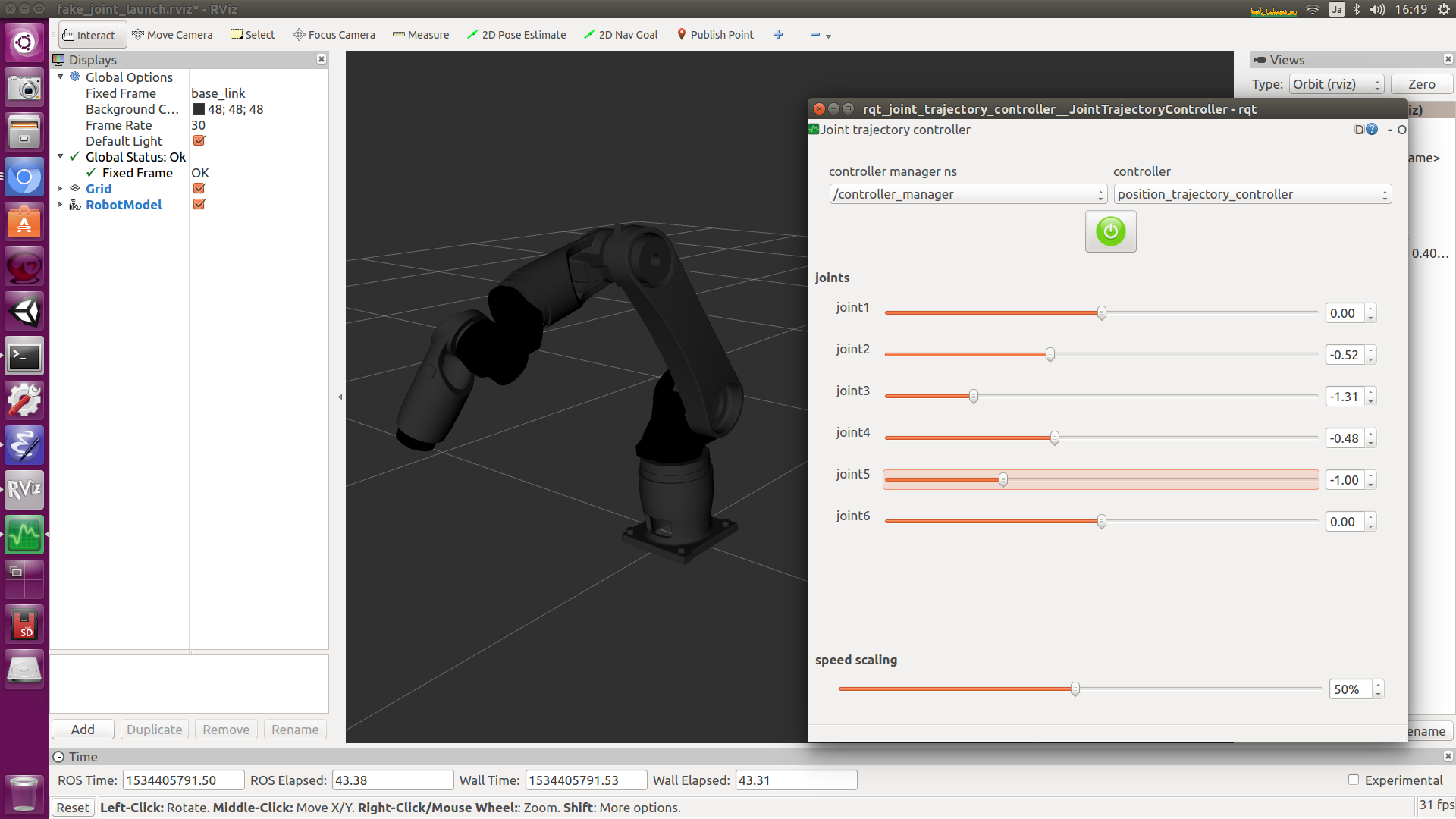
To use just fake driver and rqt plugin:
$ roslaunch fake_joint_launch tra1.launch use_rqt:=true
To use fake driver and MoveIt!:
$ roslaunch fake_joint_launch tra1.launch use_rviz:=false
$ roslaunch tra1_bringup tra1_moveit.launch
PR2
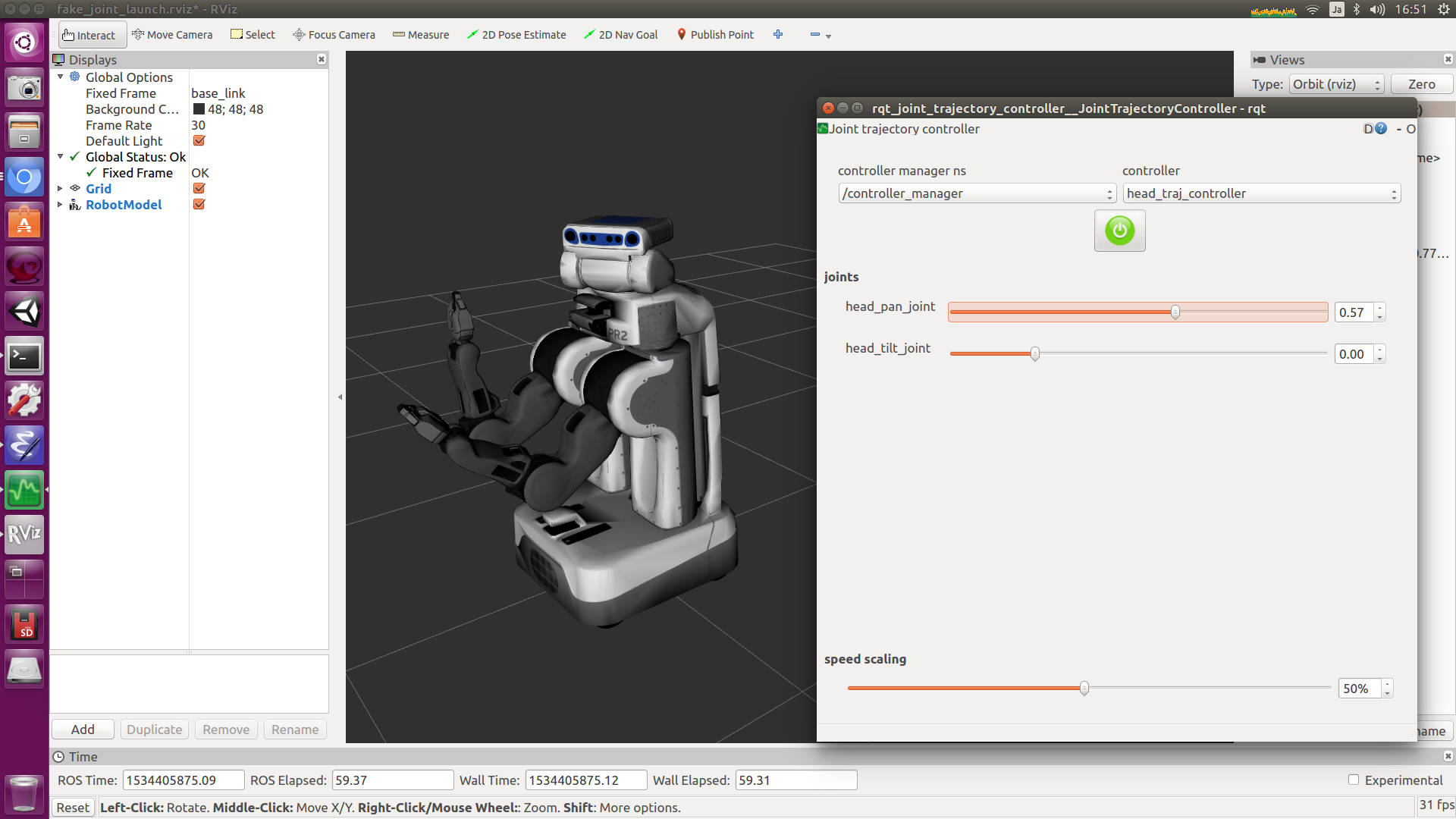
To use just fake driver and rqt plugin:
$ roslaunch fake_joint_launch pr2.launch use_rqt:=true
I can’t find MoveIt! files for actual robot :-(