
|
fusionslam-unifying-instant-ngp-for-monocular-slam repositorylocalization mapping slam nerf 3d-reconstruction depth-estimation ros2 visual-slam monocular-slam superpoint instant-ngp nerfstudio |
|
|
|
|
fusionslam-unifying-instant-ngp-for-monocular-slam repositorylocalization mapping slam nerf 3d-reconstruction depth-estimation ros2 visual-slam monocular-slam superpoint instant-ngp nerfstudio |
|
|
|
|
fusionslam-unifying-instant-ngp-for-monocular-slam repositorylocalization mapping slam nerf 3d-reconstruction depth-estimation ros2 visual-slam monocular-slam superpoint instant-ngp nerfstudio |
|
|
|
|
fusionslam-unifying-instant-ngp-for-monocular-slam repositorylocalization mapping slam nerf 3d-reconstruction depth-estimation ros2 visual-slam monocular-slam superpoint instant-ngp nerfstudio |
|
|
|
|
fusionslam-unifying-instant-ngp-for-monocular-slam repositorylocalization mapping slam nerf 3d-reconstruction depth-estimation ros2 visual-slam monocular-slam superpoint instant-ngp nerfstudio ngp_ros2 |
|
|
Repository Summary
| Description | Dive into cutting-edge FusionSLAM, where SuperPoint, SuperGlue, Neural Depth Estimation, and Instant-NGP converge, elevating Monocular SLAM to unparalleled precision and performance. Redefining mapping, localization, and reconstruction in a single camera setup. |
| Checkout URI | https://github.com/jagennath-hari/fusionslam-unifying-instant-ngp-for-monocular-slam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-07-30 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | localization mapping slam nerf 3d-reconstruction depth-estimation ros2 visual-slam monocular-slam superpoint instant-ngp nerfstudio |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| ngp_ros2 | 0.0.0 |
README
FusionSLAM-Unifying-Instant-NGP-for-Monocular-SLAM
Dive into cutting-edge FusionSLAM, where SuperPoint, SuperGlue, Neural Depth Estimation, and Instant-NGP converge, elevating Monocular SLAM to unparalleled precision and performance. Redefining mapping, localization, and reconstruction in a single camera setup.
🏁 Dependencies
1) NVIDIA Driver (Official Download Link) 2) CUDA Toolkit (Official Link) 3) ZED SDK (Official Guide) 4) OpenCV CUDA (Github Guide) 5) ROS 2 Humble (Official Link) 6) Miniconda (Official Link) 7) ZED ROS 2 Wrapper (Official Github Link) 8) RTAB-Map (Official Github Link) 9) RTAB-Map ROS 2 (Official Github Link) 10) PyTorch (Official Link) 11) Instant-ngp (Official Github Link) 12) SuperPoint (Official Github Link) 13) SuperGlue (Official Github Link) 14) Nlohmann-JSON (Official Github Link)
⚙️ Install
1) Install all non ROS 2 libraries
2) Clone all ROS 2 packages into workspace
3) Clone reporsitory into ROS 2 workspace
4) colcon build --symlink-install --cmake-args -DRTABMAP_SYNC_MULTI_RGBD=ON -DRTABMAP_SYNC_USER_DATA=ON -DPYTHON_EXECUTABLE=/usr/bin/python3 -DCMAKE_BUILD_TYPE=Release --parallel-workers $(nproc) --executor sequential
5) source ~/.bashrc or source ROS 2 workspace
6) Run python trace.py and change path of SuperPoint weights, this will generate a model compatible with your version of PyTorch
7) Add libtorch path export LD_LIBRARY_PATH=LD_LIBRARY_PATH:../miniconda3/envs/rtabmap/lib/python3.10/site-packages/torch/lib${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}} ensure the path is correct else RTAB-Map will not work
⌛️ SLAM
1) Run SLAM to generate dataset
2) ros2 launch ngp_ros2 slam.launch.py rgb_topic:=/zed2i/zed_node/rgb/image_rect_color depth_topic:=/zed2i/zed_node/depth/depth_registered camera_info_topic:=/zed2i/zed_node/rgb/camera_info odom_topic:=/zed2i/zed_node/odom imu_topic:=/zed2i/zed_node/imu/data scan_cloud_topic:=/zed2i/zed_node/point_cloud/cloud_registered superpoint_model_path:=../SuperPointPretrainedNetwork/superpoint_v1.pt pydetector_path:=../rtabmap_superpoint.py pymatcher_path:=../rtabmap_superglue.py detection_rate:=1 image_path:=../images/ transform_path:=../transforms.json
SLAM
Your dataset should get created in the image_path along with transforms.json in the transform_path
🖼️ Instant-NGP
1) cd /instant-ngp/build
2) ./instant-ngp ../PATH give the path to your dataset where image_path and transforms.json are located
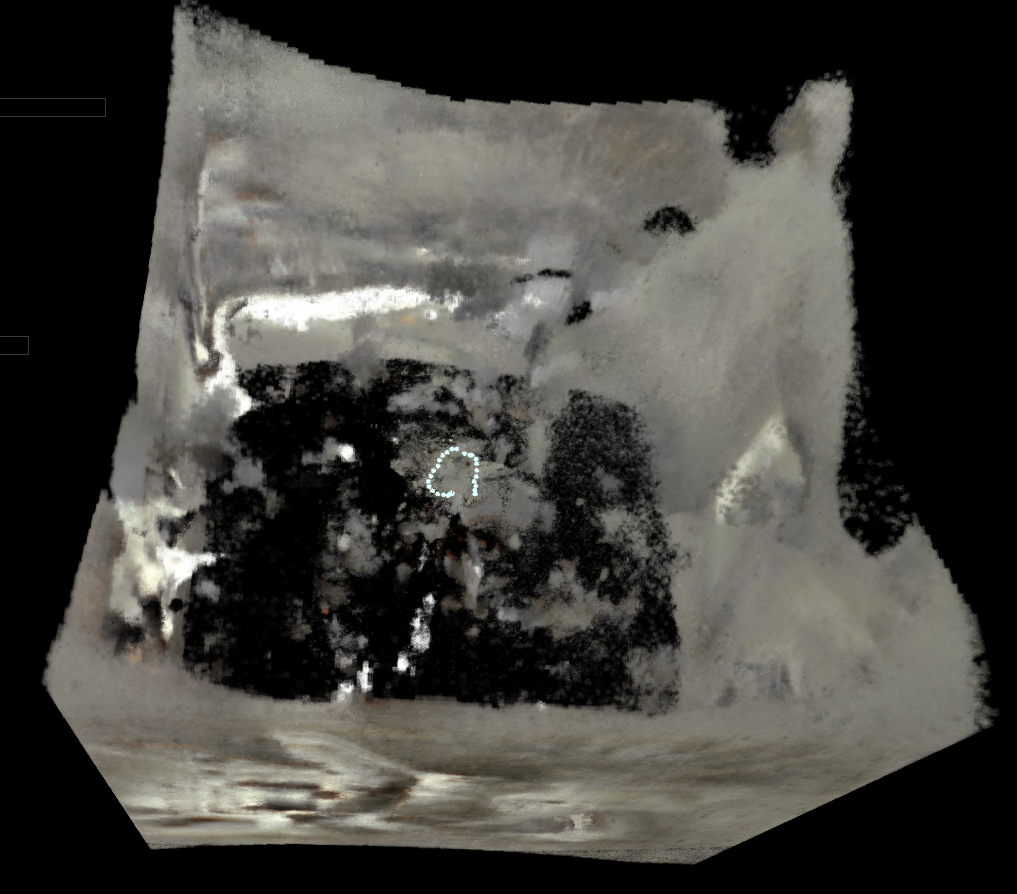
NERF
⚠️ Note
1) Ensure ZED ROS 2 Wrapper is set to run using Neural Depth Mode and Image quality is set to HD1080 for best renders 2) This Render uses Depth Supervision, feel free to change RTAB-Map and instant-ngp parameters to generate better renders
🔮 Future Updates
1) Use Pose-Graph from RTAB-Map to include loop closures for better renders 2) Add Segmentation masks using Semantic Segmentation Network 3) Generate render using Multi-camera SLAM
CONTRIBUTING
|
|
fusionslam-unifying-instant-ngp-for-monocular-slam repositorylocalization mapping slam nerf 3d-reconstruction depth-estimation ros2 visual-slam monocular-slam superpoint instant-ngp nerfstudio |
|
|
|
|
fusionslam-unifying-instant-ngp-for-monocular-slam repositorylocalization mapping slam nerf 3d-reconstruction depth-estimation ros2 visual-slam monocular-slam superpoint instant-ngp nerfstudio |
|
|
|
|
fusionslam-unifying-instant-ngp-for-monocular-slam repositorylocalization mapping slam nerf 3d-reconstruction depth-estimation ros2 visual-slam monocular-slam superpoint instant-ngp nerfstudio |
|
|
|
|
fusionslam-unifying-instant-ngp-for-monocular-slam repositorylocalization mapping slam nerf 3d-reconstruction depth-estimation ros2 visual-slam monocular-slam superpoint instant-ngp nerfstudio |
|
|