Repository Summary
| Description | A set of RViz plugins to display HRI-related ROS messages and 3D human skeletons |
| Checkout URI | https://github.com/ros4hri/hri_rviz.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-09-19 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| hri_rviz | 2.1.0 |
README
hri_rviz
This package provides a list of rviz2 plugins for human-related
data visualisation. It is part of the ROS4HRI ecosystem.
Plugins
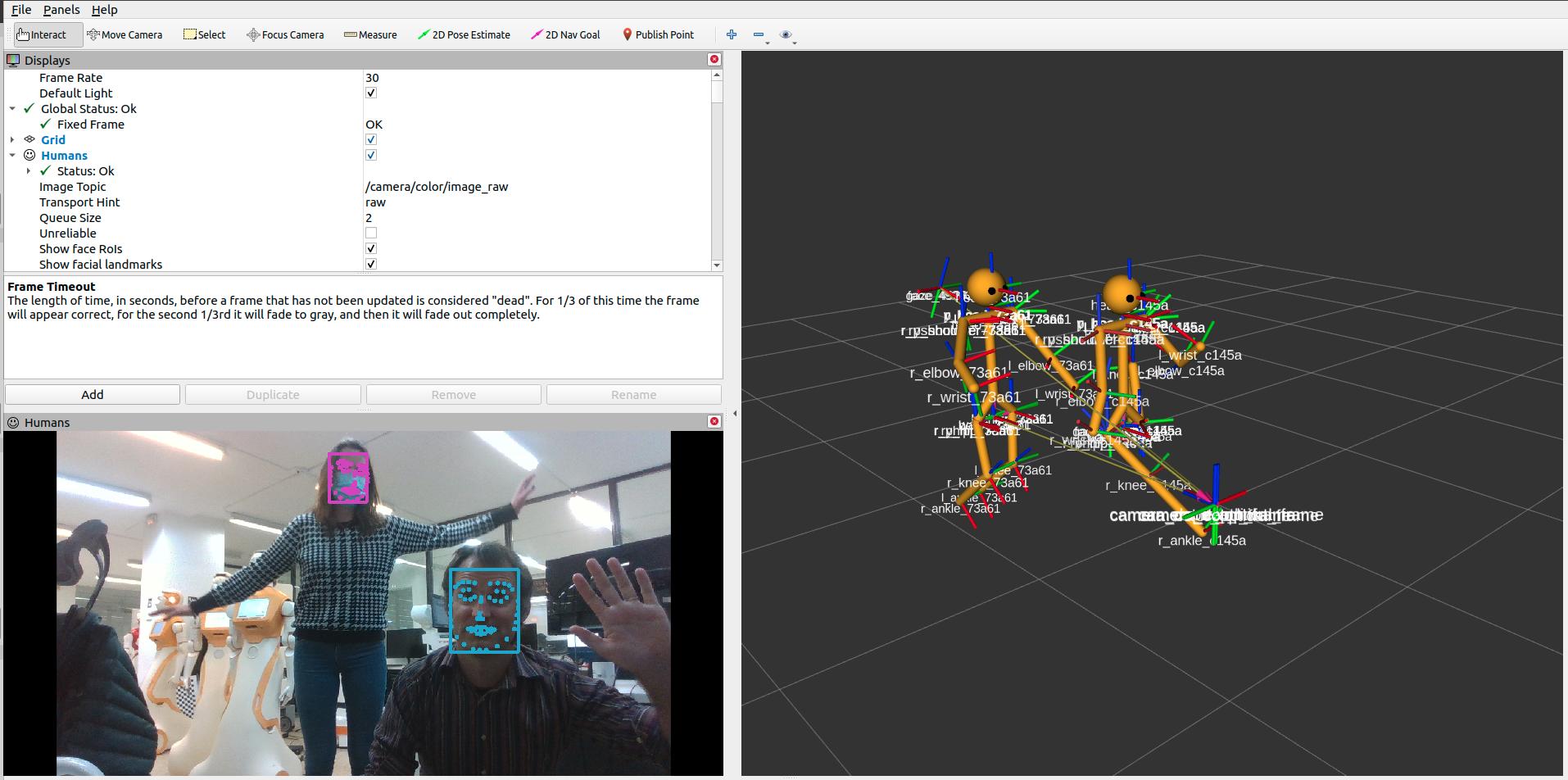
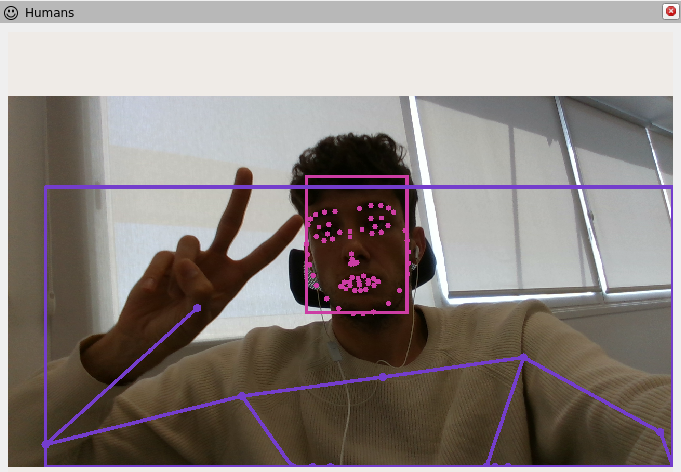
Humans
A plugin for visualising 2D information overlayed on a camera stream (ideally, the stream used to detect it). Currently, the plugin can visualise:
- Face bounding boxes
- Face landmarks
- Body bounding boxes
- 2D skeleton keypoints
How to use it
- If not already available, add a
Displays panel; - press the
Addbutton at the bottom to istantiate a new plugin; - select
By topic; - among the available topics, select the
Humansplugin for the camera stream you are interested in; - once created the plugin, select which type of information you want to visualise (face bounging boxes, skeleton landmarks, etc.);
- enjoy!
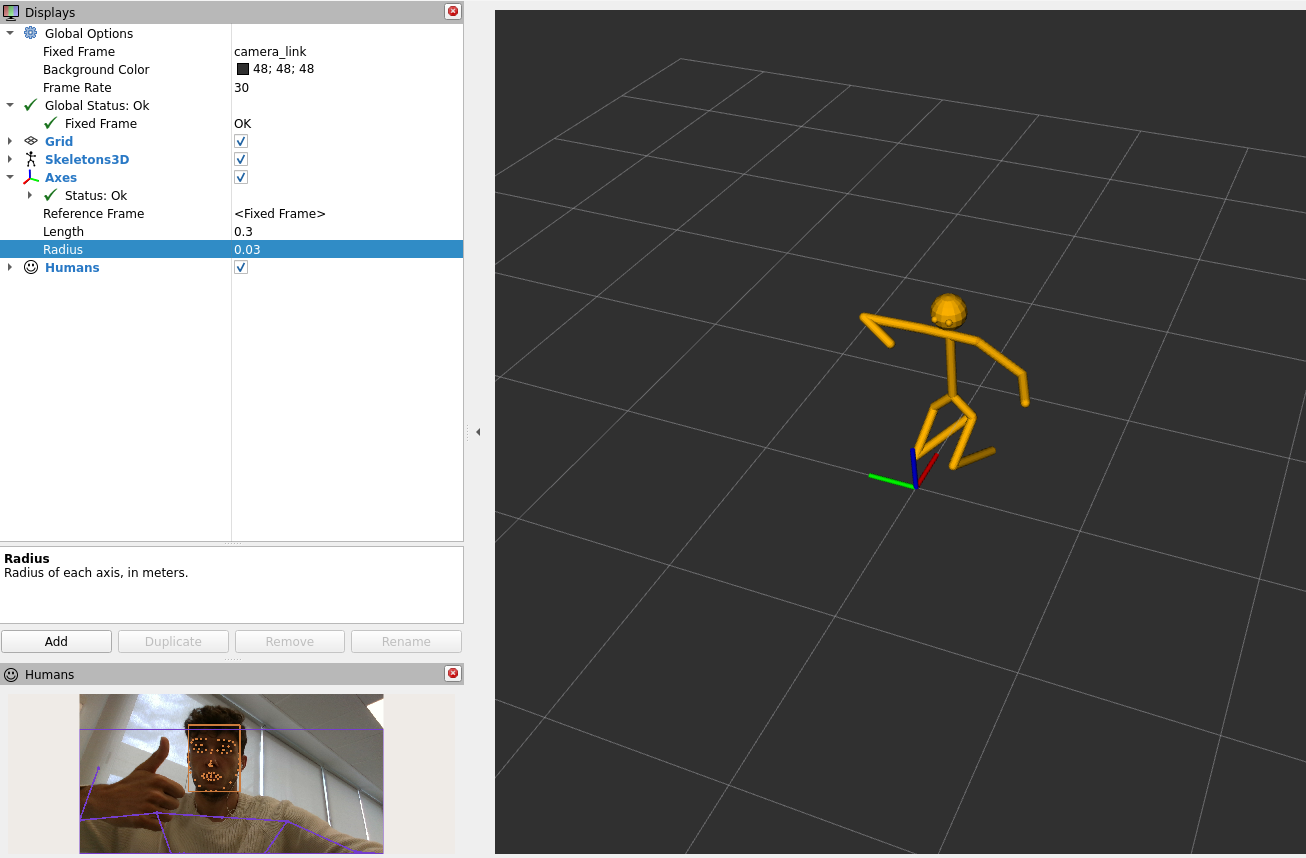
Skeletons3D
A plugin for visualising the estimated 3D poses of the detected humans.
How to use it
- If not already available, add a
Displays panel; - press the
Addbutton at the bottom to istantiate a new plugin; - select
By display type; - select
Skeletons3D; - enjoy!
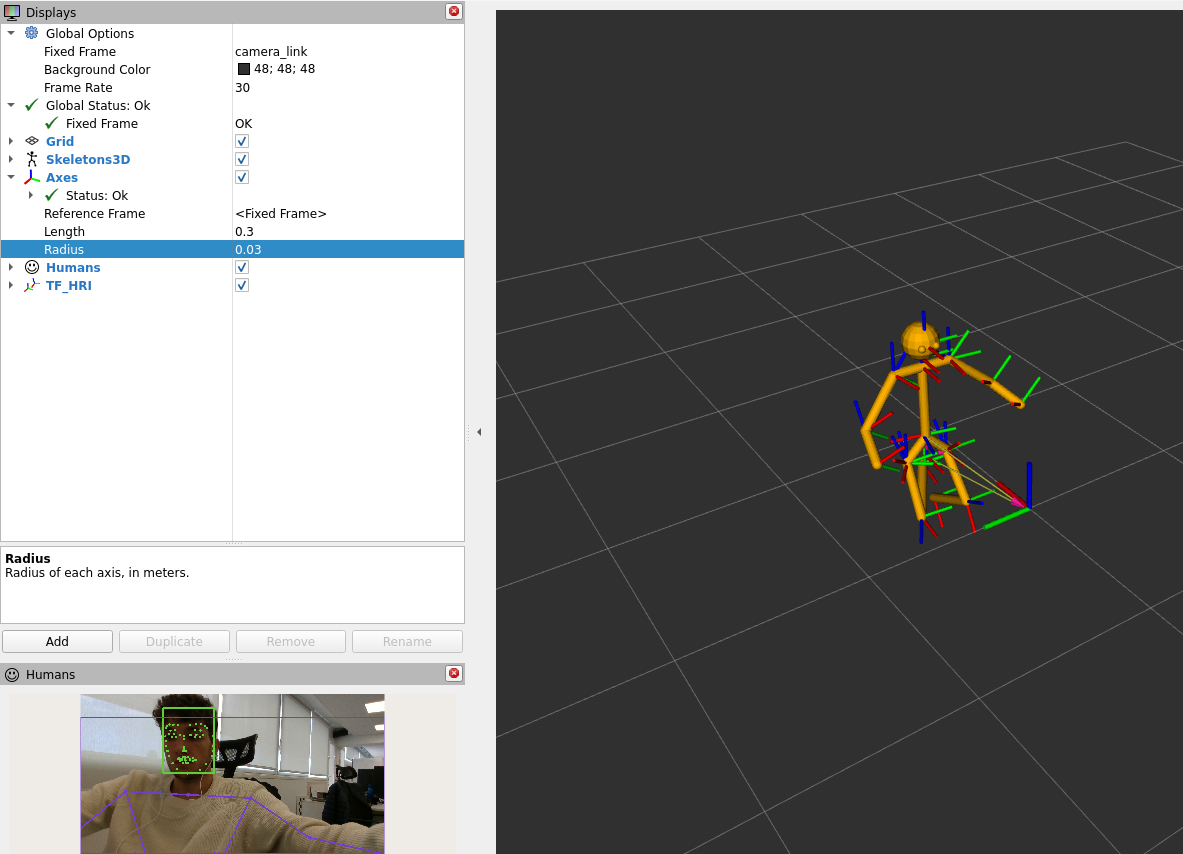
TF_HRI
A plugin for visualising the human-related TF frames. These are higly dynamical,
appearing and disappearing in a matter of seconds. Using the classic TF plugin
would result in a crowded and chaotic frames visualisation. This plugin:
- looks over the detected faces and bodies;
- only displays the face and bodies TF frames for the currently detected bodies and faces;
- readily remove the TF frames for those bodies and faces that are no more tracked, avoiding the disappearing phase observed in the original TF frame for the non-updated frames. It is possible to select which human frames to visualise among:
- face frames;
- gaze frames;
- body frames;
How to use it
- If not already available, add a
Displays panel; - press the
Addbutton at the bottom to istantiate a new plugin; - select
By display type; - select
TF_HRI; - enjoy!
Test
To test the hri_rviz plugins:
- Download
hri_face_detectandhri_fullbody; - build them;
- start an RGB camera stream;
- start face and body detection:
ros2 launch hri_face_detect face_detect.launch.py filtering_frame:=<camera_frame> rgb_camera:=<rgb_camera_stream_ns>-
ros2 launch hri_fullbody hri_fullbody.launch.py rgb_camera:=<rgb_camera_stream_ns>where<rgb_camera_stream_ns>is the RGB camera stream namespace (e.g.,/camera/color). This expects the raw RGB images to be published on<rgb_camera_stream_ns>/image_raw. Check thelaunchfiles parameters for different options.
- start the plugins as previously described.
CONTRIBUTING
Contributing Guidelines
Thank you for your interest in contributing to this project Whether it’s a bug report, new feature, correction, or additional documentation, we greatly value feedback and contributions from our community.
Please read through this document before submitting any issues or pull requests to ensure we have all the necessary information to effectively respond to your bug report or contribution.
Reporting Bugs/Feature Requests
We welcome you to use the GitHub issue tracker to report bugs or suggest features.
When filing an issue, please check existing open issues, or recently closed, issues to make sure somebody else hasn’t already reported the issue. Please try to include as much information as you can. Details like these are incredibly useful:
- A reproducible test case or series of steps
- The version of our code being used
- Any modifications you’ve made relevant to the bug
- Anything unusual about your environment or deployment
Contributing via Pull Requests
Contributions via pull requests are much appreciated. Before sending us a pull request, please ensure that:
- You are working against the latest source on the master branch.
- You check existing open, and recently merged, pull requests to make sure someone else hasn’t addressed the problem already.
- You open an issue to discuss any significant work - we would hate for your time to be wasted.
To send us a pull request, please:
- Fork the repository.
- Modify the source; please focus on the specific change you are contributing. If you also reformat all the code, it will be hard for us to focus on your change.
- Ensure local tests pass. (
colcon test) - Commit to your fork using clear commit messages.
- Send a pull request, answering any default questions in the pull request interface.
- Pay attention to any automated CI failures reported in the pull request, and stay involved in the conversation.
GitHub provides additional documentation on forking a repository and creating a pull request.
Licensing
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Description | A set of RViz plugins to display HRI-related ROS messages and 3D human skeletons |
| Checkout URI | https://github.com/ros4hri/hri_rviz.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-10-18 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| hri_rviz | 0.4.2 |
README
hri_rviz
A suite of RViz plugins for HRI-related messages and human kinmetaic models.