
|
inferencehelper_sample_ros repositorycpp deeplearning ros2 onnx tensorflow-lite inference_helper_sample_ros inference_helper_sample_ros_interface |
|
|
Repository Summary
| Description | DNN Node Collection using Inference Helper in ROS2 |
| Checkout URI | https://github.com/iwatake2222/inferencehelper_sample_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-04-24 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | cpp deeplearning ros2 onnx tensorflow-lite |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| inference_helper_sample_ros | 0.0.0 |
| inference_helper_sample_ros_interface | 0.0.0 |
README
InferenceHelper_Sample_ROS
- DNN node collection using Inference Helper (https://github.com/iwatake2222/InferenceHelper ) in ROS2
Node Collection
| Node | Tested frameworks | Description |
|——|——————-| ———– |
| transport | None | Just transport input image |
| cls_mobilenet_v2 | <ul><li>INFERENCE_HELPER_ENABLE_TFLITE_DELEGATE_XNNPACK</li><li>INFERENCE_HELPER_ENABLE_ONNX_RUNTIME</li><li>INFERENCE_HELPER_ENABLE_MNN</li><li>INFERENCE_HELPER_ENABLE_NCNN</li><li>INFERENCE_HELPER_ENABLE_OPENCV</li></ul> | Classification by MobileNetV2 |
| det_yolox | <ul><li>INFERENCE_HELPER_ENABLE_TFLITE_DELEGATE_XNNPACK</li><li>INFERENCE_HELPER_ENABLE_ONNX_RUNTIME</li><li>INFERENCE_HELPER_ENABLE_MNN</li><li>INFERENCE_HELPER_ENABLE_NCNN</li></ul> | Detection by YOLOX-Nano
Light |
| seg_paddleseg_cityscapessota | <ul><li>INFERENCE_HELPER_ENABLE_TFLITE_DELEGATE_XNNPACK</li><li>INFERENCE_HELPER_ENABLE_ONNX_RUNTIME</li></ul> | Segmentation by PaddleSeg CityScapesSOTA
Very heavy |
| depth_lapdepth | <ul><li>INFERENCE_HELPER_ENABLE_TFLITE_DELEGATE_XNNPACK</li><li>INFERENCE_HELPER_ENABLE_ONNX_RUNTIME</li></ul> | Depth by LapDepth, Point Cloud
Heavy |
- There are lots of projects which haven’t been ported. You can add more by referring the following repos
- https://github.com/iwatake2222/InferenceHelper_Sample
- https://github.com/iwatake2222/play_with_tflite
- https://github.com/iwatake2222/play_with_tensorrt
- https://github.com/iwatake2222/play_with_ncnn
- https://github.com/iwatake2222/play_with_mnn
-
Tested frameworksabove are just frameworks I tested. You can try another framework- I haven’t tried but it’s recommended to use TensorRT (GPU) for heavy models
Tested Environment
- Host PC
- Ubuntu 20.04
- Ubuntu 20.04 + Docker
- Windows 11 + WSL2 (Ubuntu 20.04)
- ROS2 version
- Foxy
How to Run
Create docker container for ROS2
- This is just an example. You can skip this if you have your ROS2 environment in you PC
xhost local: # if needed
docker run -it --name ros2_foxy_1 -e DISPLAY=$DISPLAY --net=host osrf/ros:foxy-desktop
# docker start ros2_foxy_1
# docker exec -it ros2_foxy_1 /ros_entrypoint.sh bash
Install software
# export DISPLAY=192.168.1.2:0 # if needed
apt update && apt install -y libopencv-dev ros-foxy-image-pipeline unzip
Create ROS2 workspace and download this repo
source /opt/ros/foxy/setup.bash
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
git clone https://github.com/iwatake2222/InferenceHelper_Sample_ROS.git
cd InferenceHelper_Sample_ROS
git submodule update --init
sh inference_helper_sample_ros/src/inference_helper/third_party/download_prebuilt_libraries.sh
sh download_resource.sh
Build
cd ~/dev_ws
rosdep install -i --from-path src --rosdistro foxy -y
colcon build --cmake-args -DINFERENCE_HELPER_ENABLE_TFLITE_DELEGATE_XNNPACK=OFF -DINFERENCE_HELPER_ENABLE_ONNX_RUNTIME=ON
# colcon build --cmake-args -DINFERENCE_HELPER_ENABLE_TFLITE_DELEGATE_XNNPACK=ON -DINFERENCE_HELPER_ENABLE_ONNX_RUNTIME=OFF
- Enable one of
INFERENCE_HELPER_ENABLE_***options when you build. - Above commands are just an example. Refer to https://github.com/iwatake2222/InferenceHelper#cmake-options to find more build options
- Note
- Some frameworks may not be supported in your environment
- Some models may not be supported in your environment / framework you selected
Set library path
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:build/inference_helper_sample_ros/
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:src/InferenceHelper_Sample_ROS/inference_helper_sample_ros/src/inference_helper/third_party/onnxruntime_prebuilt/linux-x64/lib/
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:src/InferenceHelper_Sample_ROS/inference_helper_sample_ros/src/inference_helper/third_party/mnn_prebuilt/ubuntu/lib/
- You need to specify framework library path in the same terminal as you run the node later
- There may be a way to avoid it. HELP WANTED!!
Run
- Run manually
- You need 3 terminals
cd ~/dev_ws
. install/setup.bash
ros2 run image_publisher image_publisher_node src/InferenceHelper_Sample_ROS/resource/dog.jpg
ros2 run inference_helper_sample_ros det_yolox_exe
ros2 run image_view image_view --ros-args --remap image:=/transported_image_raw
- Run launch file
cd ~/dev_ws
. install/setup.bash
ros2 launch inference_helper_sample_ros cls_mobilenet_v2.launch.py image_filename:=src/InferenceHelper_Sample_ROS/resource/parrot.jpg
ros2 launch inference_helper_sample_ros det_yolox.launch.py
ros2 launch inference_helper_sample_ros depth_lapdepth.launch.py
ros2 launch inference_helper_sample_ros seg_paddleseg_cityscapessota.launch.py image_filename:=src/InferenceHelper_Sample_ROS/resource/dashcam_02.jpg
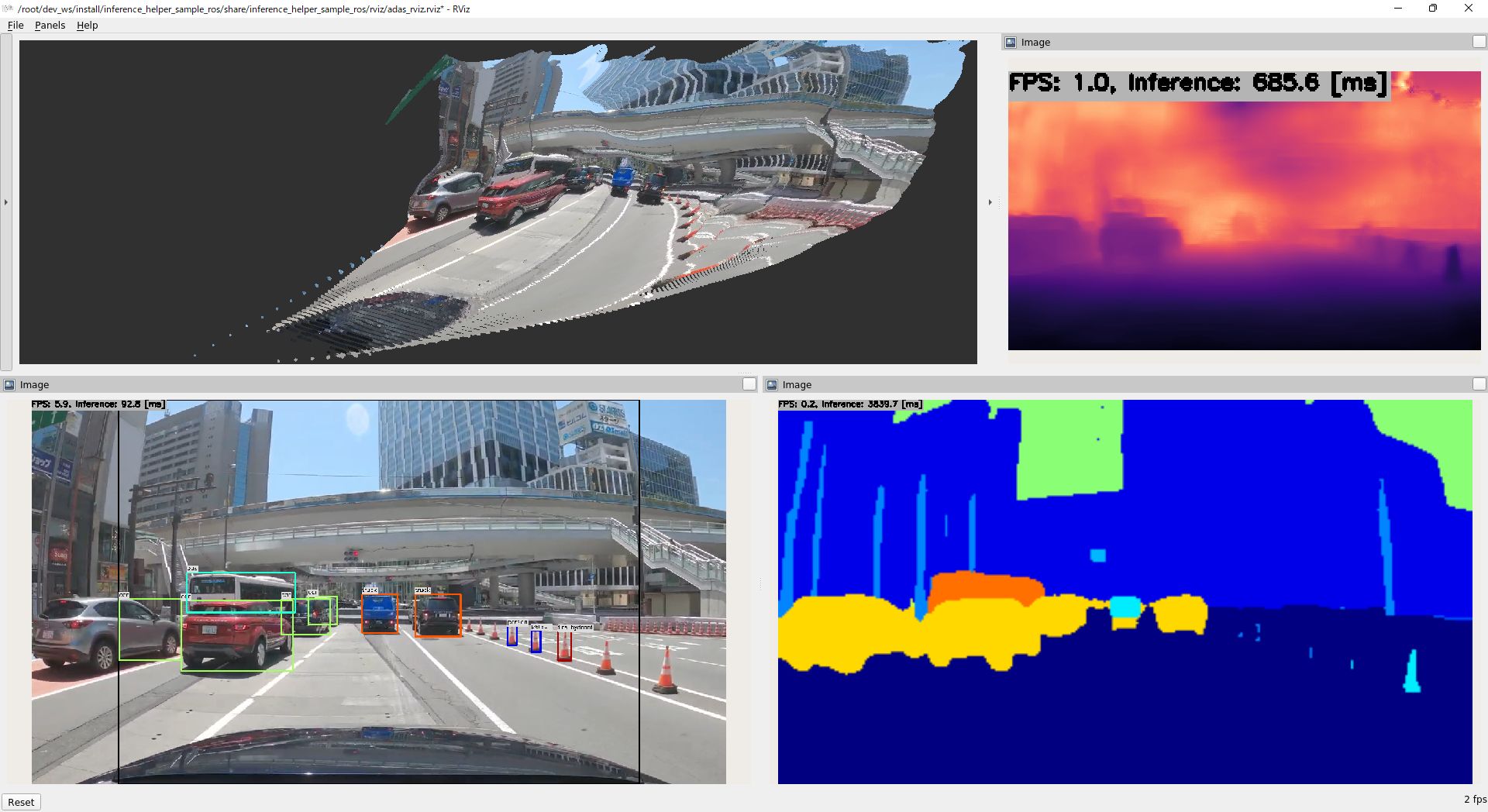
- Run ADAS demo
- Notice: this demo is very heavy
cd ~/dev_ws
. install/setup.bash
ros2 launch inference_helper_sample_ros adas.launch.py
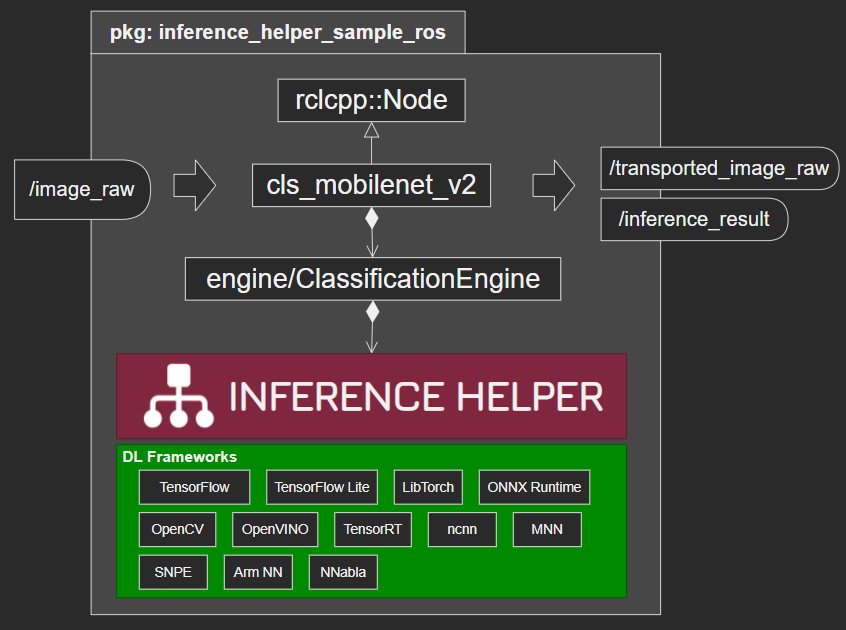
Node Specs

- Subscribed Topics
-
/image_raw(sensor_msgs/msg/Image)
-
- Published Topics
-
/transported_image_raw(sensor_msgs/msg/Image) -
/inference_result- inference_helper_sample_ros_interface/msg/Classification.msg, BoundingBoxList.msg, etc.
-
sensor_msgs/msg/PointCloud2(depth)
-
- Parameters
-
topic_image_sub/image_raw
-
topic_image_pub/transported_image_raw
-
topic_result_pub/inference_result
-
work_dir/root/dev_ws/src/InferenceHelper_Sample_ROS/resource/
-
thread_num- 4
-
License
- Copyright 2022 iwatake2222
- Licensed under the Apache License, Version 2.0
Acknowledgements
- This project utilizes OSS (Open Source Software)