
|
isaac_ros_image_pipeline repositorygpu cv image-processing ros nvidia stereo-vision jetson ros2 ros2-humble |
|
|
|
|
isaac_ros_image_pipeline repositorygpu cv image-processing ros nvidia stereo-vision jetson ros2 ros2-humble |
|
|
|
|
isaac_ros_image_pipeline repositorygpu cv image-processing ros nvidia stereo-vision jetson ros2 ros2-humble |
|
|
|
|
isaac_ros_image_pipeline repositorygpu cv image-processing ros nvidia stereo-vision jetson ros2 ros2-humble |
|
|
|
|
isaac_ros_image_pipeline repositorygpu cv image-processing ros nvidia stereo-vision jetson ros2 ros2-humble isaac_ros_depth_image_proc gxf_isaac_depth_image_proc gxf_isaac_image_flip gxf_isaac_rectify gxf_isaac_sgm gxf_isaac_tensorops isaac_ros_image_pipeline isaac_ros_image_proc isaac_ros_stereo_image_proc |
|
|
Repository Summary
| Description | NVIDIA-accelerated ROS 2 packages for camera image processing. |
| Checkout URI | https://github.com/nvidia-isaac-ros/isaac_ros_image_pipeline.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-02-28 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | gpu cv image-processing ros nvidia stereo-vision jetson ros2 ros2-humble |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| isaac_ros_depth_image_proc | 3.2.5 |
| gxf_isaac_depth_image_proc | 3.2.5 |
| gxf_isaac_image_flip | 3.2.5 |
| gxf_isaac_rectify | 3.2.5 |
| gxf_isaac_sgm | 3.2.5 |
| gxf_isaac_tensorops | 3.2.5 |
| isaac_ros_image_pipeline | 3.2.5 |
| isaac_ros_image_proc | 3.2.5 |
| isaac_ros_stereo_image_proc | 3.2.5 |
README
Isaac ROS Image Pipeline
NVIDIA-accelerated Image Pipeline.



Overview
Isaac ROS Image Pipeline is a metapackage of functionality for image processing. Camera output often needs pre-processing to meet the input requirements of multiple different perception functions. This can include cropping, resizing, mirroring, correcting for lens distortion, and color space conversion. For stereo cameras, additional processing is required to produce disparity between left + right images and a point cloud for depth perception.
This package is accelerated using the GPU and specialized hardware
engines for image computation, replacing the CPU-based
image_pipeline metapackage.
Considerable effort has been made to ensure that replacing
image_pipeline with isaac_ros_image_pipeline on a Jetson or GPU
is as painless a transition as possible.
[!Note] Some image pre-processing functions use specialized hardware engines, which offload the GPU to make more compute available for other tasks.
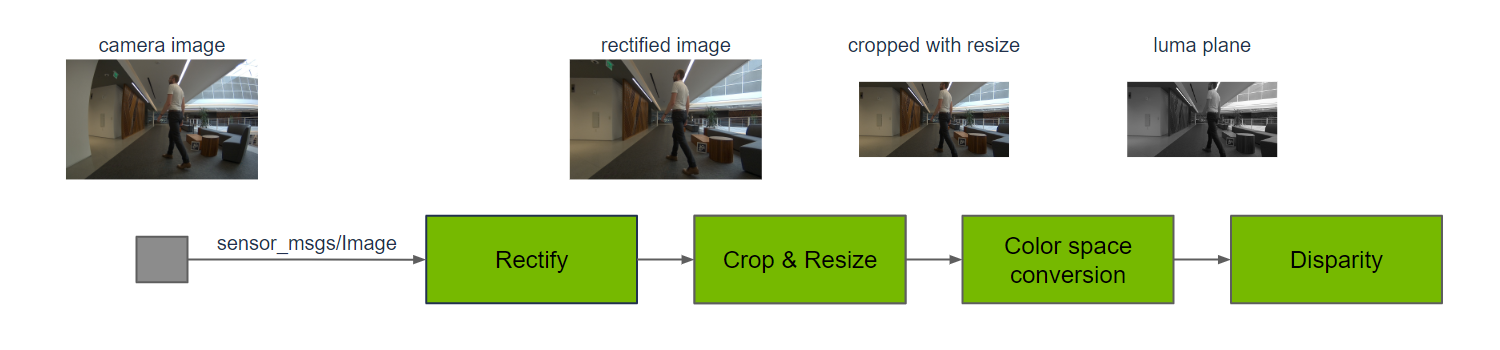
Rectify corrects for lens distortion from the received camera sensor
message. The rectified image is resized to the input resolution for
disparity, using a crop before resizing to maintain image aspect ratio.
The image is color space converted to YUV from RGB using the luma
channel (the Y in YUV) to compute disparity using
SGM. This
common graph of nodes can be performed without the CPU processing a
single pixel using isaac_ros_image_pipeline; in comparison, using
image_pipeline, the CPU would process each pixel ~3 times.
The Isaac ROS Image Pipeline metapackage offloads the CPU from common image processing tasks so it can perform robotics functions best suited for the CPU.
Isaac ROS NITROS Acceleration
This package is powered by NVIDIA Isaac Transport for ROS (NITROS), which leverages type adaptation and negotiation to optimize message formats and dramatically accelerate communication between participating nodes.
Performance
| Sample Graph |
Input Size |
AGX Orin |
Orin NX |
Orin Nano Super 8GB |
x86_64 w/ RTX 4090 |
|---|---|---|---|---|---|
|
Rectify Node |
1080p |
800 fps 2.8 ms @ 30Hz |
572 fps 3.3 ms @ 30Hz |
595 fps 3.8 ms @ 30Hz |
2500 fps 0.57 ms @ 30Hz |
|
Stereo Disparity Node |
1080p |
118 fps 11 ms @ 30Hz |
78.1 fps 14 ms @ 30Hz |
83.8 fps 13 ms @ 30Hz |
943 fps 1.6 ms @ 30Hz |
|
Stereo Disparity Graph |
1080p |
111 fps 15 ms @ 30Hz |
72.2 fps 18 ms @ 30Hz |
77.4 fps 18 ms @ 30Hz |
692 fps 4.6 ms @ 30Hz |
Documentation
Please visit the Isaac ROS Documentation to learn how to use this repository.
Packages
-
isaac_ros_depth_image_proc -
isaac_ros_image_pipeline -
isaac_ros_image_proc -
isaac_ros_stereo_image_proc
Latest
Update 2024-12-10: Added new alpha blending node
CONTRIBUTING
Isaac ROS Contribution Rules
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise, any Contribution intentionally submitted for inclusion in the Work by You to the Licensor shall be under the terms and conditions of this License, without any additional terms or conditions. Notwithstanding the above, nothing herein shall supersede or modify the terms of any separate license agreement you may have executed with Licensor regarding such Contributions.
Contributors must sign-off each commit by adding a Signed-off-by: ...
line to commit messages to certify that they have the right to submit
the code they are contributing to the project according to the
Developer Certificate of Origin (DCO).
|
|
isaac_ros_image_pipeline repositorygpu cv image-processing ros nvidia stereo-vision jetson ros2 ros2-humble |
|
|
|
|
isaac_ros_image_pipeline repositorygpu cv image-processing ros nvidia stereo-vision jetson ros2 ros2-humble |
|
|
|
|
isaac_ros_image_pipeline repositorygpu cv image-processing ros nvidia stereo-vision jetson ros2 ros2-humble |
|
|
|
|
isaac_ros_image_pipeline repositorygpu cv image-processing ros nvidia stereo-vision jetson ros2 ros2-humble |
|
|