
|
isaac_ros_image_segmentation repositoryai gpu inference dnn nvidia image-segmentation jetson ros2 tensorrt ros2-humble |
|
|
|
|
isaac_ros_image_segmentation repositoryai gpu inference dnn nvidia image-segmentation jetson ros2 tensorrt ros2-humble |
|
|
|
|
isaac_ros_image_segmentation repositoryai gpu inference dnn nvidia image-segmentation jetson ros2 tensorrt ros2-humble |
|
|
|
|
isaac_ros_image_segmentation repositoryai gpu inference dnn nvidia image-segmentation jetson ros2 tensorrt ros2-humble |
|
|
|
|
isaac_ros_image_segmentation repositoryai gpu inference dnn nvidia image-segmentation jetson ros2 tensorrt ros2-humble gxf_isaac_ros_segment_anything gxf_isaac_ros_unet isaac_ros_peoplesemseg_models_install isaac_ros_segformer isaac_ros_segment_anything isaac_ros_unet |
|
|
Repository Summary
| Description | NVIDIA-accelerated, deep learned semantic image segmentation |
| Checkout URI | https://github.com/nvidia-isaac-ros/isaac_ros_image_segmentation.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-02-28 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | ai gpu inference dnn nvidia image-segmentation jetson ros2 tensorrt ros2-humble |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| gxf_isaac_ros_segment_anything | 3.2.5 |
| gxf_isaac_ros_unet | 3.2.5 |
| isaac_ros_peoplesemseg_models_install | 3.2.5 |
| isaac_ros_segformer | 3.2.5 |
| isaac_ros_segment_anything | 3.2.5 |
| isaac_ros_unet | 3.2.5 |
README
Isaac ROS Image Segmentation
NVIDIA-accelerated, deep learned semantic image segmentation

Overview
Isaac ROS Image Segmentation contains ROS packages for semantic image segmentation.
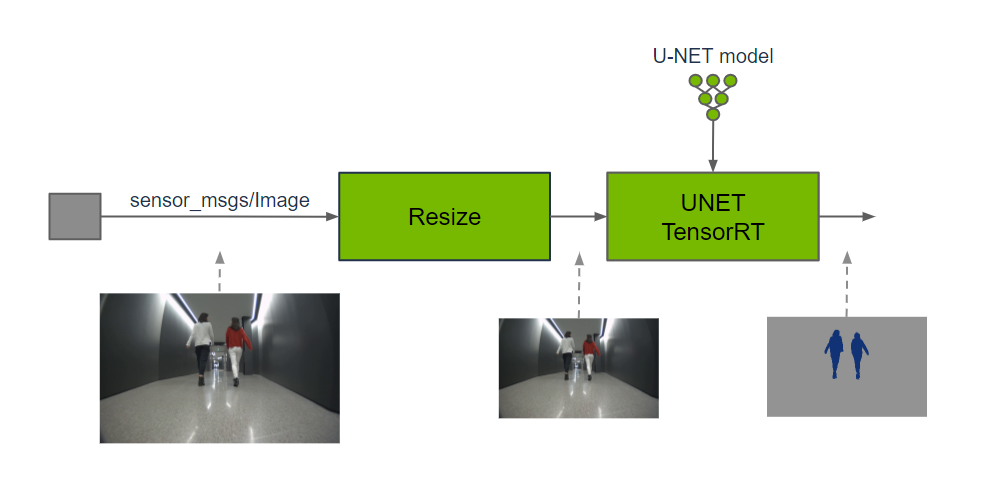
These packages provide methods for classification of an input image at the pixel level by running GPU-accelerated inference on a DNN model. Each pixel of the input image is predicted to belong to a set of defined classes. The output prediction can be used by perception functions to understand where each class is spatially in a 2D image or fuse with a corresponding depth location in a 3D scene.
| Package | Model Architecture | Description |
|---|---|---|
| Isaac ROS U-NET | U-NET | Convolutional network popular for biomedical imaging segmentation models |
| Isaac ROS Segformer | Segformer | Transformer-based network that works well for objects of varying scale |
| Isaac ROS Segment Anything | Segment Anything | Segments any object in an image when given a prompt as to which one |
Input images may need to be cropped and resized to maintain the aspect ratio and match the input resolution expected by the DNN model; image resolution may be reduced to improve DNN inference performance, which typically scales directly with the number of pixels in the image.

Image segmentation provides more information and uses more compute than object detection to produce classifications per pixel, whereas object detection classifies a simpler bounding box rectangle in image coordinates. Object detection is used to know if, and where spatially in a 2D image, the object exists. On the other hand, image segmentation is used to know which pixels belong to the class. One application is using the segmentation result, and fusing it with the corresponding depth information in order to know an object location in a 3D scene.
Isaac ROS NITROS Acceleration
This package is powered by NVIDIA Isaac Transport for ROS (NITROS), which leverages type adaptation and negotiation to optimize message formats and dramatically accelerate communication between participating nodes.
Performance
| Sample Graph |
Input Size |
AGX Orin |
Orin NX |
Orin Nano Super 8GB |
x86_64 w/ RTX 4090 |
|---|---|---|---|---|---|
|
SAM Image Segmentation Graph Full SAM |
720p |
2.22 fps 390 ms @ 30Hz |
– |
– |
14.6 fps 74 ms @ 30Hz |
|
SAM Image Segmentation Graph Mobile SAM |
720p |
8.40 fps 120 ms @ 30Hz |
2.22 fps 240 ms @ 30Hz |
2.22 fps 230 ms @ 30Hz |
62.5 fps 22 ms @ 30Hz |
|
TensorRT Graph PeopleSemSegNet |
544p |
436 fps 10 ms @ 30Hz |
212 fps 13 ms @ 30Hz |
224 fps 13 ms @ 30Hz |
587 fps 3.7 ms @ 30Hz |
Documentation
Please visit the Isaac ROS Documentation to learn how to use this repository.
Packages
Latest
Update 2024-12-10: Update to be compatible with JetPack 6.1
CONTRIBUTING
Isaac ROS Contribution Rules
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise, any Contribution intentionally submitted for inclusion in the Work by You to the Licensor shall be under the terms and conditions of this License, without any additional terms or conditions. Notwithstanding the above, nothing herein shall supersede or modify the terms of any separate license agreement you may have executed with Licensor regarding such Contributions.
Contributors must sign-off each commit by adding a Signed-off-by: ...
line to commit messages to certify that they have the right to submit
the code they are contributing to the project according to the
Developer Certificate of Origin (DCO).
|
|
isaac_ros_image_segmentation repositoryai gpu inference dnn nvidia image-segmentation jetson ros2 tensorrt ros2-humble |
|
|
|
|
isaac_ros_image_segmentation repositoryai gpu inference dnn nvidia image-segmentation jetson ros2 tensorrt ros2-humble |
|
|
|
|
isaac_ros_image_segmentation repositoryai gpu inference dnn nvidia image-segmentation jetson ros2 tensorrt ros2-humble |
|
|
|
|
isaac_ros_image_segmentation repositoryai gpu inference dnn nvidia image-segmentation jetson ros2 tensorrt ros2-humble |
|
|