
Repository Summary
| Description | 基于Json文件解析的行为树,为机器人宏观决策设计 |
| Checkout URI | https://github.com/tup-robomaster/jsonfilebased_robotdecision.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-09-24 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| fake_msg_publisher | 0.0.0 |
| global_interface | 0.0.0 |
| robot_decision | 0.0.0 |
README
JsonFileBased_RobotDecision
基于Json文件解析的行为树,为机器人宏观决策设计
基于Json文件的机器人决策系统(JsonFileBased RobotDecision),为RoboMaster参赛机器人宏观决策设计。通过修改指定Json文件,快速修改机器人运行逻辑并约束移动区域,提供高自由度、高定制化的机器人决策逻辑定制功能。带有可视化GUI,可直观查看机器人决策状态。另有虚假消息发布者,以模拟虚拟环境来提供离线调试功能。程序运行在ROS2(Robot Operating System 2) Galactic框架下。
Version:1.2a
节点(Node) 介绍:
robot_decision:
ros2 run robot_decision robot_decision_node
订阅:
| 话题 | 消息 | 描述 |
|---|---|---|
| /obj_hp | global_interface::msg::ObjHP | 场上兵种/设施血量 |
| /car_pos | global_interface::msg::CarPos | 场上各兵种位置 |
| /game_info | global_interface::msg::GameInfo | 比赛相关信息 |
| /serial_msg | global_interface::msg::Serial | 车辆模式、弹速等信息 |
| /joint_states | sensor_msgs::msg::JointState | 云台yaw、pitch轴角度 |
| perception_detector/perception_array | global_interface::msg::DetectionArray | 感知识别信息 |
| navigate_through_poses/_action/feedback | nav2_msgs::action::NavigateThroughPoses::Impl::FeedbackMessage | Nav2 Action反馈信息 |
| navigate_through_poses/_action/status | action_msgs::msg::GoalStatusArray | Nav2 Action Goal 状态 |
| /armor_detector/armor_msg | global_interface::msg::Autoaim | 自瞄检测信息 |
发布:
| 话题 | 消息 | 描述 |
|---|---|---|
| robot_decision/aim_yaw | std_msgs::msg::Float32 | 车辆目标朝向偏角 |
| robot_decision/decision | global_interface::msg::Decision | 车辆当前决策信息 |
动作:
| Name | Action | 描述 |
|---|---|---|
| navigate_through_poses | nav2_msgs::action::NavigateThroughPoses | 发送Nav2路径导航动作 |
参数:
| Name | 类型 | 描述 |
|---|---|---|
| distance_thr | float | 路径点计算距离阈值 |
| seek_thr | float | 感知索敌距离阈值 |
| IsRed | bool | 红蓝方标志位 |
| IfShowUI | bool | 是否显示可视化GUI |
| SelfIndex | int | 车辆自身ID(索引) |
| friendOutPostIndex | int | 我方前哨站ID(索引) |
fake_msg_publisher:
ros2 run fake_msg_publisher fake_msg_publisher_node
发布:
| 话题 | 消息 | 描述 |
|---|---|---|
| /obj_hp | global_interface::msg::ObjHP | 场上兵种/设施血量 |
| /car_pos | global_interface::msg::CarPos | 场上各兵种位置 |
| /game_info | global_interface::msg::GameInfo | 比赛相关信息 |
| /serial_msg | global_interface::msg::Serial | 车辆模式、弹速等信息 |
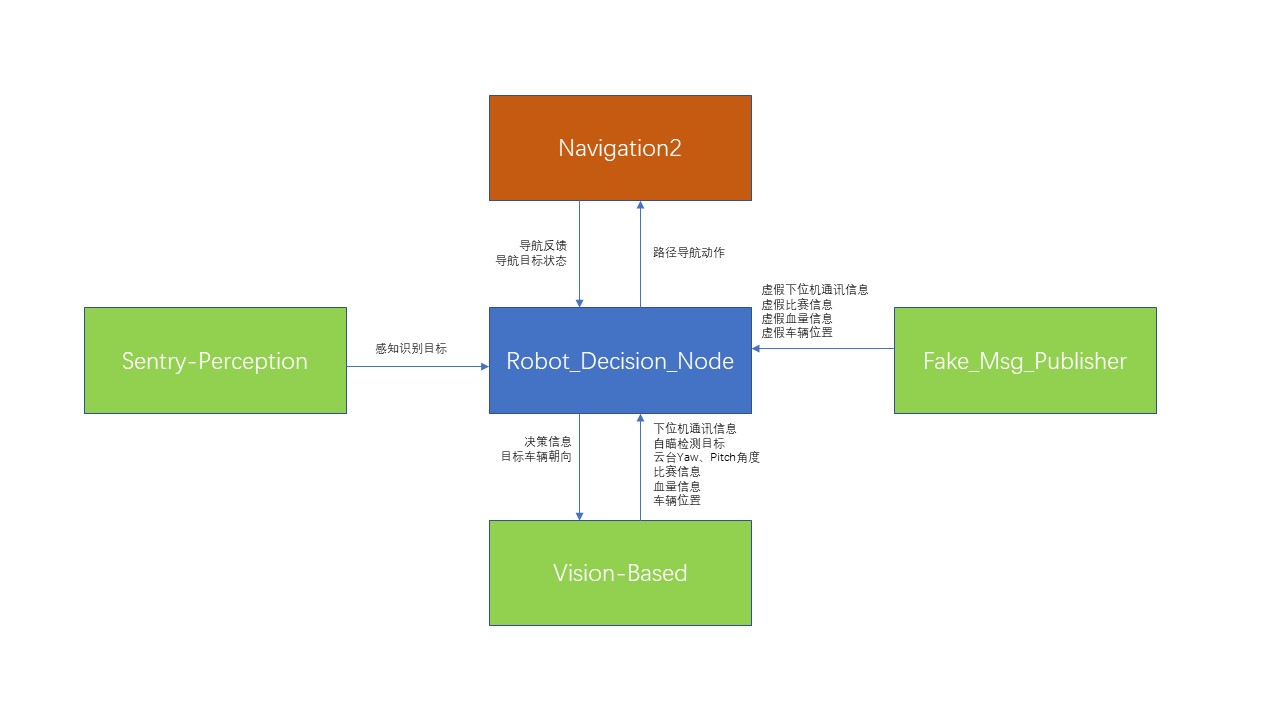
节点关系图
项目结构 (OUT-OF-DATA)
├── images //图片目录
├── LICENSE //开源协议
├── README.md //项目自述文件
└── src //项目源码目录
├── fake_msg_publisher //假消息发布者功能包目录
│ ├── fake_msg_publisher
│ │ ├── fake_msg_publisher_node.py //节点源码
│ │ ├── init.py
│ │ └── pycache //python缓存
│ │ ├── fake_msg_publisher_node.cpython-38.pyc
│ │ └── init.cpython-38.pyc
│ ├── package.xml //功能包依赖xml文件
│ ├── resource //功能包资源文件
│ │ └── fake_msg_publisher
│ ├── setup.cfg //ROS2 setup.cfg
│ ├── setup.py //ROS2 setup.py
│ └── test
│ ├── test_copyright.py
│ ├── test_flake8.py
│ └── test_pep257.py
├── global_interface //定义全局通用消息文件
│ ├── CMakeLists.txt //功能包CMakeLists.txt
│ ├── msg //消息目录
│ │ ├── CarPos.msg //车辆位置消息
│ │ ├── Decision.msg //决策消息
│ │ ├── DetectionArray.msg //感知识别消息
│ │ ├── Detection.msg //自瞄识别消息
│ │ ├── GameInfo.msg //比赛信息消息
│ │ ├── ObjHP.msg //血量消息
│ │ ├── Point2f.msg //2D点消息
│ │ └── Serial.msg //下位机通讯消息
│ └── package.xml //功能包依赖xml文件
└── robot_decision //决策功能包
├── CMakeLists.txt //功能包CMakeLists.txt
├── include //头文件目录
│ ├── Json //Json处理库头文件
│ │ ├── json-forwards.h
│ │ └── json.h
│ ├── robot_decision //决策系统头文件目录
│ │ ├── public.h //公共头文件
│ │ ├── RobotDecision.h //决策系统头文件
│ │ └── structs.h //结构体定义
│ └── robot_decision_node.hpp //决策节点头文件
├── launch //launch目录
│ └── decision_node_launch.py //带参数节点启动launch文件
├── package.xml //功能包依赖xml文件
├── resources //资源目录
│ └── RMUL.png //RMUL赛场障碍图
├── sample //Json样例目录
│ ├── decisions.json //决策Json样例
│ └── waypoints.json //路径点Json样例
└── src //源码目录
├── Json //Json处理库源码
│ └── jsoncpp.cpp
├── robot_decision //决策系统源码
│ └── RobotDecision.cpp
└── robot_decision_node.cpp //决策节点源码
决策主要流程图
graph LR
A[订阅者消息回调] --> B{消息是否合法?};
B -- NO ---> C[终止本次决策];
B -- YES ---> D[处理车辆位置信息];
D --> E{是否存在感知目标?};
E -- YES ---> F[使用感知信息更新车辆位置];
F --> G[提取自身位置并分离敌我车辆位置];
E -- NO --->G;
G --> H{是否存在TF2坐标系转换关系};
H -- YES ---> I[使用TF2坐标系转换更新自身位置];
I --> J{自身位置是否合法?};
H -- NO ---> K{是否存在Nav2反馈信息};
K -- YES ---> L[使用Nav2反馈信息更新自身位置];
L --> J;
K -- NO ---> J;
J -- NO ----->M[终止本次决策];
J -- YES ---->N[根据敌方位置决策车辆朝向];
N --> O[根据当前条件选取当前决策];
O --> P{检查上次决策是否执行完成};
P -- NO --> Q{当前决策权重是否高于上次决策};
Q -- YES ---> R[取消上次决策执行];
Q -- NO --> V;
R --> T[根据决策计算路径];
P -- YES ---> T;
T --> U[执行\发布决策];
U --> V[更新GUI];
程序采用时间相近协议同步接收 /obj_hp 、/car_pos 、/game_info 、/serial_msg 话题的消息,异步接收 /joint_states 、 perception_detector/perception_array 、navigate_through_poses/_action/feedback 、 navigate_through_poses/_action/status的消息,每次回调固定处理车辆朝向和目标决策。
决策由车辆当前位置、车辆当前模式、当前比赛时间、己方前哨站当前血量、己方车辆位置、敌方车辆位置共同决定,在有多个决策符合条件的情况下,取权重最高的决策。
机器人移动路径点由决策给出,分为直达和连续两种情况。直达情况下,直接给出最终路径点,连续情况下,由图深度优先搜索算法计算一系列连续路径点,可适当缓解Nav2导航问题。
车辆朝向由敌方车辆位置决定,通过计算索敌圈内最近敌人方位,得出视野外敌方角度,被障碍遮挡但仍被检测到的敌方位置通过间段采样的方法滤除。
GUI
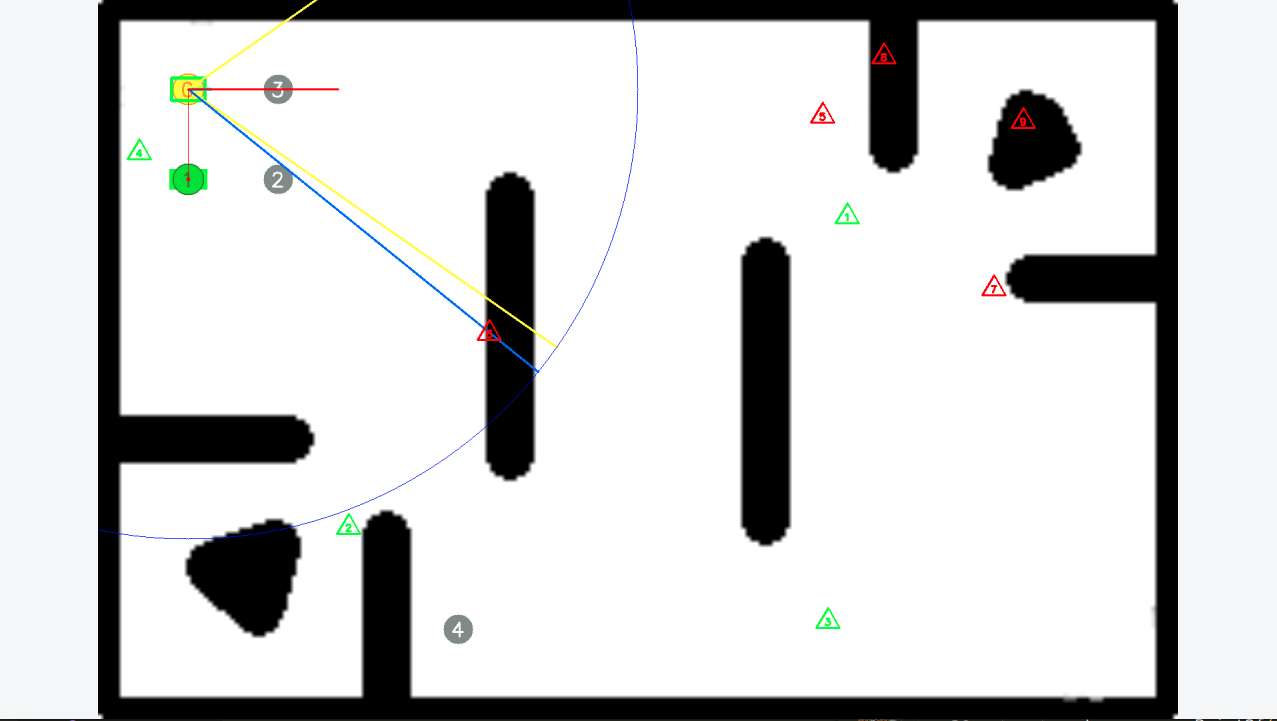
GUI可直观显示车辆当前状态、路径点、决策状态、敌我位置与索敌情况。路径点分为当前、符合条件但未被选择、符合条件且被选择和不符合条件四种状态。路径点上的敌我接近情况也被显示。(PS:图上敌我位置由虚假消息发布者随机给出)
模板
决策:
{
"data" : [
{
"id" : 0, //决策ID
"name" : "test1", //决策命名
"wayPointID" : [-1], //决策所属路径点,填写多个时,只要当前路径点在列表内,便通过判断,-1不作判断
"weight" : 500, //决策权重,符合条件的决策中优先取权重大的,大权重决策可覆盖正在执行的决策
"start_time" : -1, //决策容许时间范围起始,-1不作判断
"end_time" : 420, //决策容许时间范围结束,-1不作判断
"robot_mode" : 0, //当前机器人模式,-1不作判断
"minHP" : -1, //决策容许血量范围起始,-1不作判断
"maxHP" : -1, //决策容许血量范围结束,-1不作判断
"decide_mode" : 0, //决策决定机器人模式[6:正常巡航,7:扭腰巡航,8:自瞄]
"decide_wayPoint" : 0, //决策决定目标路径点(id)
"out_post_HP_min": 0, //决策容许前哨站血量线,-1不作判断
"if_succession" : false, //决策路径是否连续,否为直达
"if_reverse" : true, //是否返程
"enemyPosition" : [[-1],[-1],[-1],[-1],[-1],[-1]], //敌方车辆当前路径点ID,填写多个时,只要目标单位所在路径点在列表内,便通过判断,-1不作判断 顺序: 英雄 工程 3,4,5步兵,哨兵(UNTESTED)
"friendPosition" : [[-1],[-1],[-1],[-1],[-1],[-1]] //友方车辆当前路径点ID,填写多个时,只要目标单位所在路径点在列表内,便通过判断,-1不作判断 顺序: 英雄 工程 3,4,5步兵,哨兵(UNTESTED)
},
...
]
}
路径点:
{
"data": [
{
"id": 0, //路径点ID
"name": "test1", //路径点命名
"type": 0, //路径点类型(UNUSED)
"x": 1.0, //路径点坐标x(真实坐标)
"y": 1.0, //路径点坐标y(真实坐标)
"angle": 0.0, //路径点上车辆朝向(弧度制)(UNTESTED)
"connect": [ //路径点邻接表(配合决策if_succession使用)
1
],
"enemyWeights": [ //路径点上敌方选择权重,-1不作判断(UNUSED)
-1,
-1,
-1,
-1,
-1
]
},
...
]
}
CONFIG 配置文件:
“Debug” : false, //是否Debug(UNUSED)
“WayPointsPATH” : “waypoints.json”, //shared/JsonFile文件夹下路径点文件命名
“DecisionsPATH” : “decisions.json”, //shared/JsonFile文件夹下决策文件命名
“MAP_PATH” : “RMUL.png”, //shared/resources文件夹下map命名
“REAL_WIDTH” : 12.0, //场地真实宽度
“REAL_HEIGHT”: 8.0, //场地真实高度
“GOAL_TIME_THR_SEC” : 2, //目标执行时间阈值(UNUSED)
“TIME_THR” : 1, //消息有效时间(秒)
“CAR_SEEK_FOV” : 70.0, //车辆自瞄FOV
“INIT_DISTANCE_THR” : 1.0, //路径点判断用距离阈值(米)
“INIT_SEEK_THR” : 5.0, //索敌圈半径(米)
“INIT_ISBLUE” : false, //红蓝方判断标志位 赛前修改 !important
“INIT_IFSHOWUI” : true, //是否显示UI
“INIT_SELFINDEX” : 5, //车辆当前索引(0-5)[英雄 工程 3,4,5步兵 哨兵]
“INIT_FRIENDOUTPOSTINDEX” : 6, //前哨站当前索引(0-7)[英雄 工程 3,4,5步兵 哨兵 前哨站 基地]
“INIT_FRIENDBASEINDEX” : 7, //基地当前索引(0-7)[英雄 工程 3,4,5步兵 哨兵 前哨站 基地]
“STEP_DISTANCE” : 0.1, //障碍判断步进(米)
“GAME_TIME” : 420 //比赛持续时间(秒)
决策、路径点文件编写注意事项:
1.对于红蓝方,路径点文件应编写两个以适应场地换向
2.不论决策还是路径点文件,决策与路径点的ID应唯一
3.应尽量少的使用-1来跳过判断,避免出现意料外的情况
4.决策中,决策所属路径点与目标路径点一致时可达成原地驻留的效果
5.血量区间与时间区间应尽量减少重合
6.同一执行级别下的决策权重应保持一致