No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
lidar_graph_slam repositoryros2 gtsam lidar-odometry lidar-slam graph-based-slam graph_based_slam lidar_graph_slam lidar_graph_slam_msgs lidar_graph_slam_utils lidar_scan_matcher points_prefiltering |
|
|
Repository Summary
| Description | 3D Graph Based SLAM |
| Checkout URI | https://github.com/ryuyamamoto/lidar_graph_slam.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-09-09 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | ros2 gtsam lidar-odometry lidar-slam graph-based-slam |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| graph_based_slam | 0.1.0 |
| lidar_graph_slam | 0.1.0 |
| lidar_graph_slam_msgs | 0.1.0 |
| lidar_graph_slam_utils | 1.0.0 |
| lidar_scan_matcher | 0.1.0 |
| points_prefiltering | 0.1.0 |
README
LiDAR Graph SLAM
InProgress
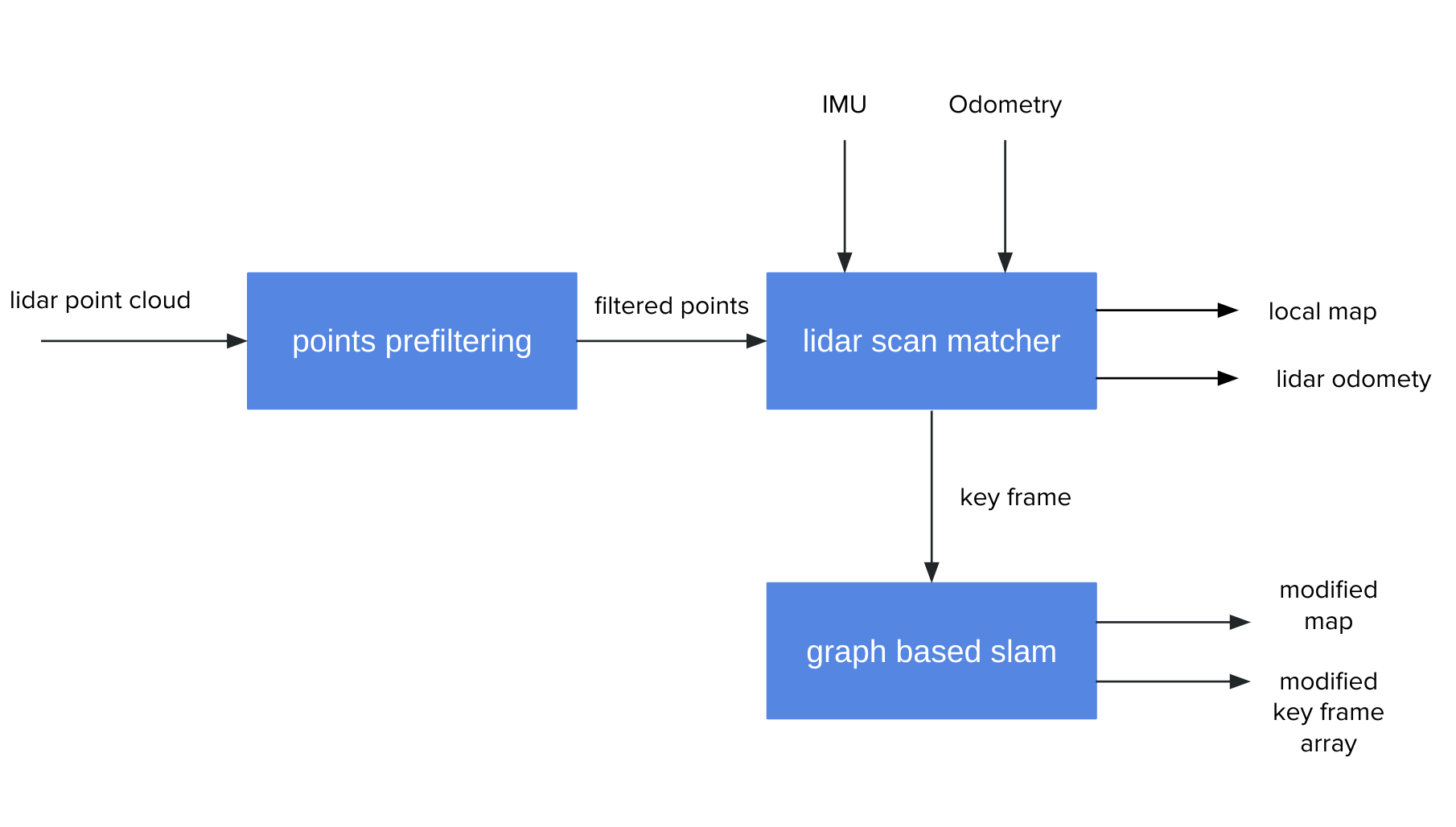
System OverView
1. Install
Build lidar_graph_slam
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone --recursive git@github.com:RyuYamamoto/lidar_graph_slam.git
cd ../
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
2. run
ros2 launch lidar_graph_slam lidar_graph_slam.launch.xml
3. save map
ros2 service call /save_map lidar_graph_slam_msgs/srv/SaveMap "{resolution: 0.2, path: "<MAP PATH>"}"
ToDo
- graph based SLAM(loop detect)
- save map
- improve loop detection
- implement other lidar odometry algorithm
- use FPFH
- use original KD-Tree
CONTRIBUTING
No CONTRIBUTING.md found.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.