
|
lidarslam_ros2 repositorylocalization robotics mapping ros lidar slam ros2 graph_based_slam lidarslam lidarslam_msgs scanmatcher |
|
|
Repository Summary
| Description | ROS 2 package of 3D lidar slam using ndt/gicp registration and pose-optimization |
| Checkout URI | https://github.com/rsasaki0109/lidarslam_ros2.git |
| VCS Type | git |
| VCS Version | develop |
| Last Updated | 2025-03-19 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | localization robotics mapping ros lidar slam ros2 |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| graph_based_slam | 0.0.0 |
| lidarslam | 0.0.0 |
| lidarslam_msgs | 0.0.0 |
| scanmatcher | 0.0.0 |
README
lidarslam_ros2
ros2 slam package of the frontend using OpenMP-boosted gicp/ndt scan matching and the backend using graph-based slam.
mobile robot mapping
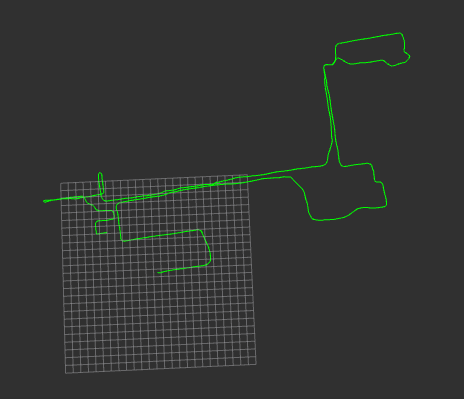
Green: path with loopclosure
(the 25x25 grids in size of 10m × 10m)
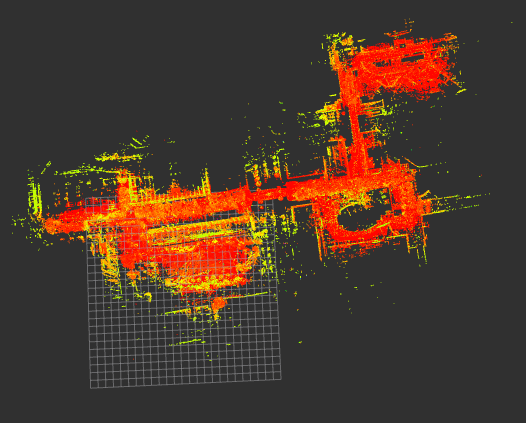
Red and yellow: map
summary
lidarslam_ros2 is a ROS2 package of the frontend using OpenMP-boosted gicp/ndt scan matching and the backend using graph-based slam.
I found that even a four-core laptop with 16GB of memory could work in outdoor environments for several kilometers with only 16 line LiDAR.
(WIP)
requirement to build
You need ndt_omp_ros2 for scan-matcher
clone
(If you forget to add the –recursive option when you do a git clone, run git submodule update --init --recursive in the lidarslam_ros2 directory)
cd ~/ros2_ws/src
git clone --recursive https://github.com/rsasaki0109/lidarslam_ros2
cd ..
rosdep install --from-paths src --ignore-src -r -y
build
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
io
frontend(scan-matcher)
-
input
/input_cloud (sensor_msgs/PointCloud2)
/tf(from “base_link” to LiDAR’s frame)
/initial_pose (geometry_msgs/PoseStamed)(optional)
/imu (sensor_msgs/Imu)(optional)
/tf(from “odom” to “base_link”)(Odometry)(optional) -
output
/current_pose (geometry_msgs/PoseStamped)
/map (sensor_msgs/PointCloud2)
/path (nav_msgs/Path)
/tf(from “map” to “base_link”)
/map_array(lidarslam_msgs/MapArray)
backend(graph-based-slam)
- input
/map_array(lidarslam_msgs/MapArray) -
output
/modified_path (nav_msgs/Path)
/modified_map (sensor_msgs/PointCloud2) - srv
/map_save (std_srvs/Empty)
how to save the map
pose_graph.g2o and map.pcd are saved in loop closing or using the following service call.
ros2 service call /map_save std_srvs/Empty
params
- frontend(scan-matcher)
| Name | Type | Default value | Description |
|---|---|---|---|
| registration_method | string | “NDT” | “NDT” or “GICP” |
| ndt_resolution | double | 5.0 | resolution size of voxel[m] |
| ndt_num_threads | int | 0 | threads using ndt(if 0 is set, maximum alloawble threads are used.)(The higher the number, the better, but reduce it if the CPU processing is too large to estimate its own position.) |
| gicp_corr_dist_threshold | double | 5.0 | the distance threshold between the two corresponding points of the source and target[m] |
| trans_for_mapupdate | double | 1.5 | moving distance of map update[m] |
| vg_size_for_input | double | 0.2 | down sample size of input cloud[m] |
| vg_size_for_map | double | 0.05 | down sample size of map cloud[m] |
| use_min_max_filter | bool | false | whether or not to use minmax filter |
| scan_max_range | double | 100.0 | max range of input cloud[m] |
| scan_min_range | double | 1.0 | min range of input cloud[m] |
| scan_period | double | 0.1 | scan period of input cloudsec |
| map_publish_period | double | 15.0 | period of map publish[sec] |
| num_targeted_cloud | int | 10 | number of targeted cloud in registration(The higher this number, the less distortion.) |
| debug_flag | bool | false | Whether or not to display the registration information |
| set_initial_pose | bool | false | whether or not to set the default pose value in the param file |
| initial_pose_x | double | 0.0 | x-coordinate of the initial pose value[m] |
| initial_pose_y | double | 0.0 | y-coordinate of the initial pose value[m] |
| initial_pose_z | double | 0.0 | z-coordinate of the initial pose value[m] |
| initial_pose_qx | double | 0.0 | Quaternion x of the initial pose value |
| initial_pose_qy | double | 0.0 | Quaternion y of the initial pose value |
| initial_pose_qz | double | 0.0 | Quaternion z of the initial pose value |
| initial_pose_qw | double | 1.0 | Quaternion w of the initial pose value |
| publish_tf | bool | true | Whether or not to publish tf from global frame to robot frame |
| use_odom | bool | false | whether odom is used or not for initial attitude in point cloud registration |
| use_imu | bool | false | whether 9-axis imu(Angular velocity, acceleration and orientation must be included.) is used or not for point cloud distortion correction.(Note that you must also set the scan_period.) |
| debug_flag | bool | false | Whether or not to display the registration information |
- backend(graph-based-slam)
| Name | Type | Default value | Description |
|---|---|---|---|
| registration_method | string | “NDT” | “NDT” or “GICP” |
| ndt_resolution | double | 5.0 | resolution size of voxel[m] |
| ndt_num_threads | int | 0 | threads using ndt(if 0 is set, maximum alloawble threads are used.) |
| voxel_leaf_size | double | 0.2 | down sample size of input cloud[m] |
| loop_detection_period | int | 1000 | period of searching loop detection[ms] |
| threshold_loop_closure_score | double | 1.0 | fitness score of ndt for loop clousure |
| distance_loop_closure | double | 20.0 | distance far from revisit candidates for loop clousure[m] |
| range_of_searching_loop_closure | double | 20.0 | search radius for candidate points from the present for loop closure[m] |
| search_submap_num | int | 2 | the number of submap points before and after the revisit point used for registration |
| num_adjacent_pose_cnstraints | int | 5 | the number of constraints between successive nodes in a pose graph over time |
| use_save_map_in_loop | bool | true | Whether to save the map when loop close(If the map saving process in loop close is too heavy and the self-position estimation fails, set this to false.) |
demo
trial environment
demo data(ROS1) is hdl_400.bag in hdl_graph_slam
The Velodyne VLP-32 was used in this data.
To use rosbag in ROS1, use rosbags
ros2 launch lidarslam lidarslam.launch.py
ros2 bag play hdl_400/
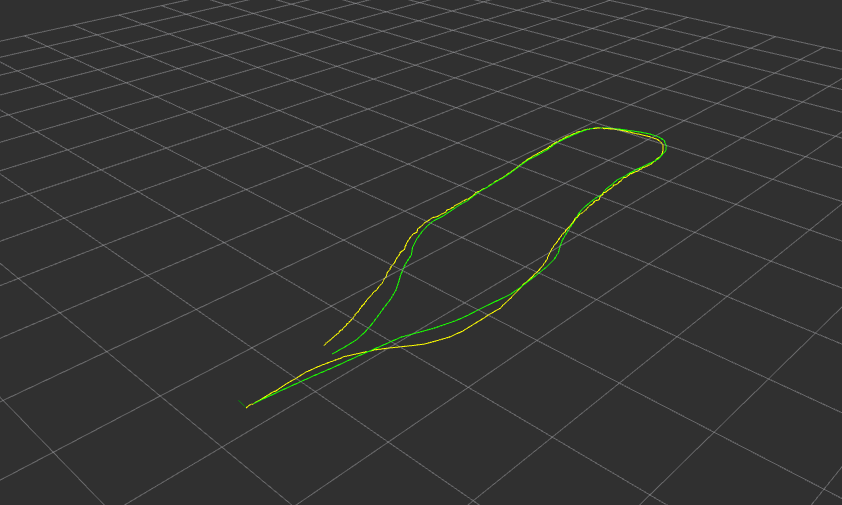
Green: path with loopclosure, Yellow: path without loopclosure
The larger environment
(This data is not available at the moment…)
demo data(ROS1) by Autoware Foundation
https://data.tier4.jp/rosbag_details/?id=212
The Velodyne VLP-16 was used in this data.
ros2 launch lidarslam lidarslam_tukuba.launch.py
ros2 bag play tc_2017-10-15-15-34-02_free_download/
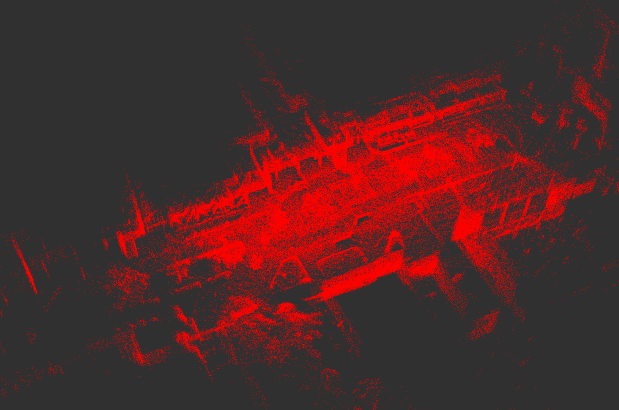
Green: path
Red and yellow: map
Used Libraries
- Eigen
- PCL(BSD3)
- g2o(BSD2 except a part)
- ndt_omp (BSD2)
Related packages
- li_slam_ros2 (BSD2)