
No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | A ROS2 package to provide gazebo-classic plugin for Livox Series LiDAR |
| Checkout URI | https://github.com/stm32f303ret6/livox_laser_simulation_ro2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-10-19 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| ros2_livox_simulation | 0.0.0 |
README
livox_laser_simulation for ROS2
This is a ros2 port of the original repo: https://github.com/Livox-SDK/livox_laser_simulation.
Tested in ros2 foxy and humble.
In this simulation project, Livox series lidars will publish two types of messages:
livox_ros_driver2/msg/CustomMsg </br> sensor_msgs/msg/PointCloud2
Therefore, by subscribing to the CustomMsg message, you can use the FAST_LIO algorithm in the your simulation.
Install
- Clone this repo in your ros2 workspace
git clone https://github.com/LihanChen2004/livox_laser_simulation_ros2.git
-
build your ros2 workspace (if there are warnings that do not allow the compilation, run the build again and you will see that the error disappears)
colcon build && source install/setup.bash
Usage
- include the lidar sensor in your URDF file, for example:
<xacro:include filename="$(find ros2_livox_simulation)/urdf/mid70.xacro" />
- attach the sensor to your robot in the URDF (or xacro) file, for example:
<xacro:mid70 name="livox" parent="base_link" topic="mid70">
<origin xyz="0 0 0.025" rpy="0 0 0"/>
</xacro:mid70>
you need to specify the parent link (usually base_link)
that's it. the example that i gave you is for mid70, but you can use mid40, mid70, mid360 and so on.
thanks to the original repo, you can find more info in it.
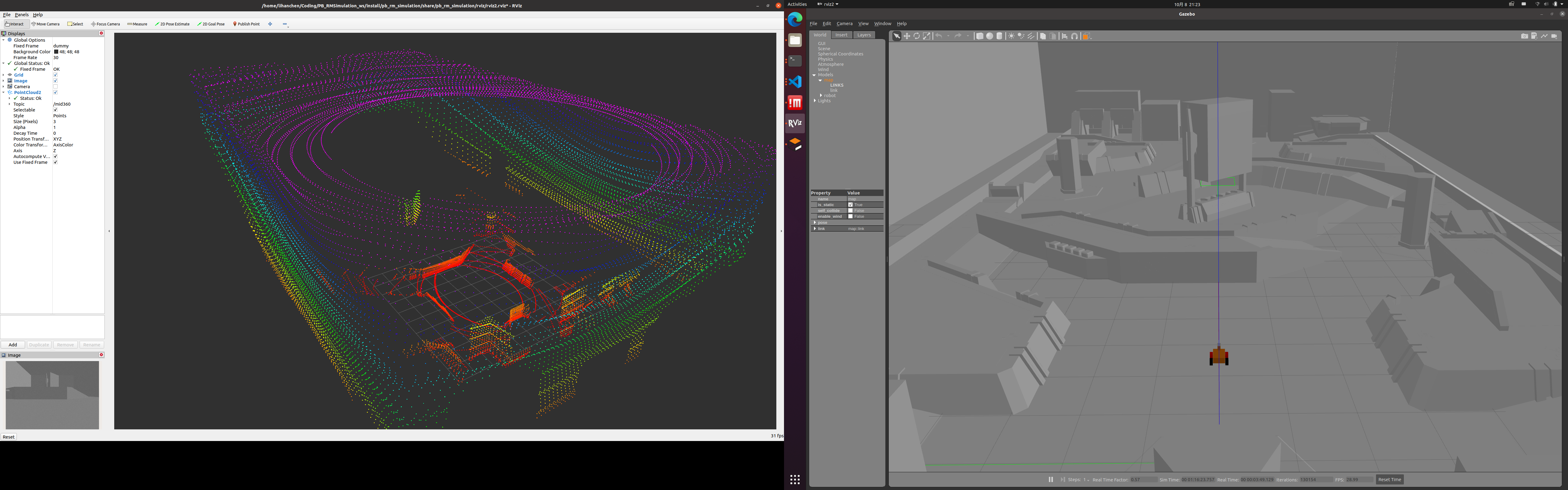
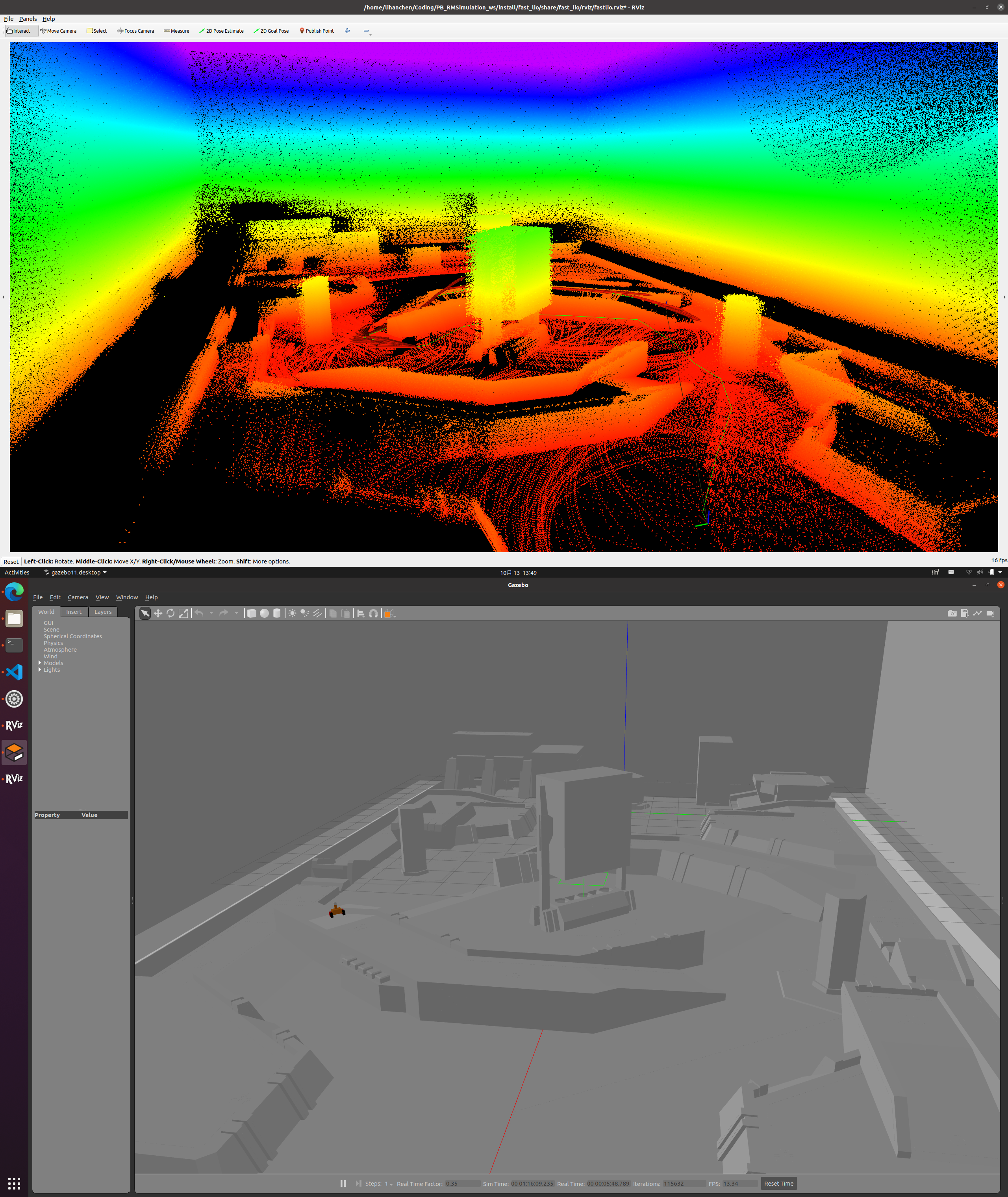
Example
-
ROS2-Gazebo simulation package for RoboMaster University Championship
You can use FAST_LIO by taking it as an example :)
CONTRIBUTING
No CONTRIBUTING.md found.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.