
|
manymove repositorymanymove_bringup manymove_cpp_trees manymove_hmi manymove_msgs manymove_object_manager manymove_planner manymove_py_trees manymove_signals |
|
|
Repository Summary
| Description | To plan and execute moves with manipulators in ROS2 |
| Checkout URI | https://github.com/pastoriomarco/manymove.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-26 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| manymove_bringup | 0.1.0 |
| manymove_cpp_trees | 0.1.0 |
| manymove_hmi | 0.0.0 |
| manymove_msgs | 0.1.0 |
| manymove_object_manager | 0.1.0 |
| manymove_planner | 0.1.0 |
| manymove_py_trees | 0.1.0 |
| manymove_signals | 0.1.0 |
README
ManyMove project - ROS2 humble

DISCLAIMER
This repository is intended primarily for my own use as a roboticist, to deploy cobots in production using ROS2.
This is HIGHLY EXPERIMENTAL and comes with no warranty of stability or safety: USE AT YOUR OWN RISK.
IMPORTANT SAFETY NOTICE: this repository does not cover safety functions. Safety MUST be implemented using the internal safety system of the robot’s controller and/or an appropriate safety controller, in compliance with your country’s regulations. Before deploying on a real robot, ensure that safety mechanisms are correctly configured.
Description
The manymove project is meant for roboticists to ease the transition to ROS2 coming from the classic frameworks of major manufacturers.
It provides a simplified, generalized framework for building robotic manipulator control logic using ROS 2 and MoveIt 2.
This series of packages was created around Ufactory Lite6 and UF850 cobots, but it is structured in a way that can extend to other robots. Also included is an example using Franka Emika Panda, which is the default demo model for Moveit in ROS2 Humble.
Prerequisites
-
Install ROS2 Humble, Moveit2 and xarm_ros2:
- You can follow the instructions on the Humble branch of my fork of xarm_ros2 on github to install all the required packages.
Quick start
-
Define your
workspace dir:- You can use for example ~/dev_ws as in xarm_ros2 repo, or define an appropriate workspace.
- From here on I’ll refer to the installation directory of the workspace as
<workspace_dir>
-
Clone
manymovehumble branch:- From
<workspace_dir>/src:
- From
git clone --branch=humble https://github.com/pastoriomarco/manymove.git
- Install the dependencies
- From
<workspace_dir>:
rosdep install --from-paths . --ignore-src --rosdistro $ROS_DISTRO -y
-
Copy the auxiliary files to run all examples with the right configuration:
- Create the
otherfolder in xarm_description/meshes and copy pneumatic gripper’s mesh there. Also copy the user param file in xarm_api/config. - From
<workspace_dir>run:
- Create the
mkdir -p ./src/xarm_ros2/xarm_description/meshes/other
cp ./src/manymove/manymove_object_manager/meshes/custom_end_tools/* ./src/xarm_ros2/xarm_description/meshes/other/
cp ./src/manymove/manymove_planner/config/xarm_user_params.yaml ./src/xarm_ros2/xarm_api/config/
-
Build the packages from
<workspace_dir>:
colcon build
-
Don’t forget to source!
- From
<workspace_dir>:
- From
source ./install/setup.bash
Bring you own robot
If you want to create a new application in ManyMove, once you have a working moveit config package you just need the following information:
- Base frame/link of the robot
- TCP (end effector) frame/link
- traj_controller action server name
- Robot’s name/model
- Planner type: moveitcpp or movegroup
When using an actuated gripper you also need:
- The name of the action server to control the gripper
- The list of the gripper’s links to exclude from collision checking
When using multiple robots with a single URFD, you’ll need a prefix for each robot (see the dual_* examples).
These values will be used to start up the following nodes:
- action_server_node: the core of the planners
- manymove_py_trees_node: the BT logic node
- manymove_hmi_node: the HMI interface
- manymove_signals: on a real robot, handles the service calls to get/set signals (currently taylored for Ufactory robots)
A little side note on Panda examples: the reference TCP frame there is not actually centered between gripper’s fingers, as ‘panda_link8’ represents the center of the flange. But since it’s aligned to the ideal TCP, you can just offset the poses when you need to refer to the TCP, without having to create a new link. In the Panda example, the -0.102 in the following line represents this offset:
blackboard->set("pick_pre_transform_xyz_rpy_1_key", std::vector<double>{-0.102, 0.0, 0.0, 0.0, 1.57, 0.0});
Right now the most extensive executable examples are found in manymove_cpp_trees repo: you can start from one of the executables there, taking care to use valid joint targets and poses for your robot. Also take some time setting up move.hpp coherently with the speed limits of your robot and planning pipeline of your choice. When you go through the code, you’ll notice I explain what each section does and how to use it: I tried to keep it updated while modifying the repo, but some comments may be outdated or not relevant anymore. Please let me know if something is not clear!
## Project Structure
This repository is composed of several sub-packages, each handling different responsibilities in the overall robotic application:
-
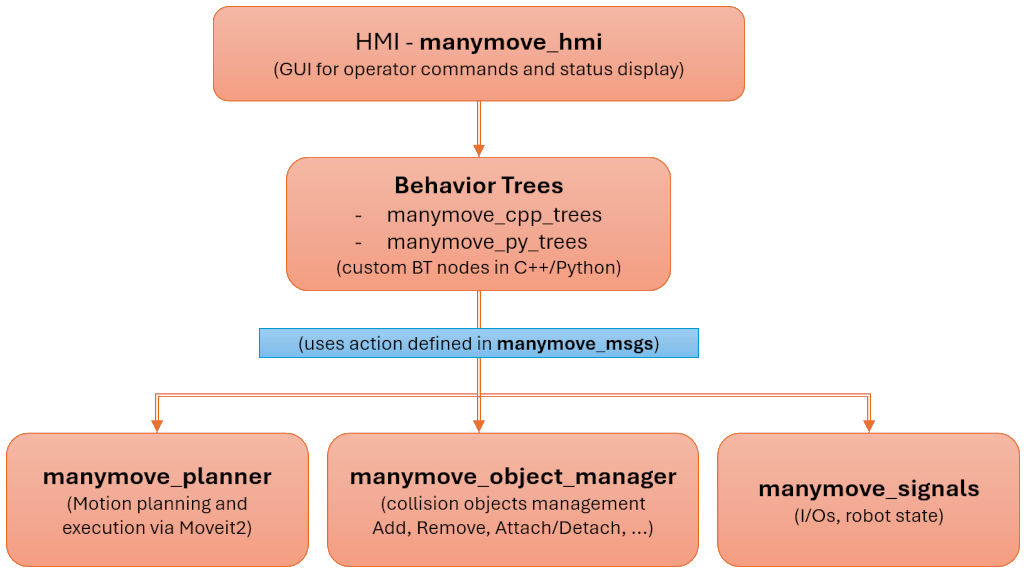
manymove_msgs- Holds all the custom action definitions (e.g.
MoveManipulator,AttachDetachObject,GetInput, etc.) and custom messages required for robot manipulation, collision object management, and I/O signaling. - These definitions are shared across other packages to keep interfaces consistent.
- Holds all the custom action definitions (e.g.
-
manymove_planner- Implements the motion-planning logic using MoveIt 2 and ROS 2 action servers.
- Offers the Action Server
move_manipulatorso other modules can request motion plans and execute trajectories. - Contains configuration files for MoveIt 2 (e.g.,
moveit_cpp.yaml) and example launch files for single or dual robot setups.
-
manymove_object_manager- Manages collision objects in the planning scene.
- Provides actions like
AddCollisionObject,RemoveCollisionObject,AttachDetachObject, etc., which can be called by higher-level logic to handle objects in the environment. - Includes mesh files and YAML configuration for objects.
-
manymove_signals- Handles digital I/O signals and checks the robot’s state via dedicated actions (e.g.,
CheckRobotState,SetOutput,GetInput). - Useful for toggling end-effector tools or reading sensor inputs in a flexible, standardized way.
- Handles digital I/O signals and checks the robot’s state via dedicated actions (e.g.,
-
manymove_cpp_trees- A C++ BehaviorTree.CPP framework that integrates with the actions exposed by the planner, object manager, and signals packages.
- Offers custom BT nodes (e.g., planning, object manipulation, signal I/O, conditions, etc.) so you can compose robotic behaviors in a modular, visual manner.
- Contains a BT client nodes (e.g.
bt_client.cpp) that demonstrates how to build, run, and manage complex behavior trees at runtime.
-
manymove_py_trees- A Python-based alternative using py_trees to build or test similar control flows.
- Useful if you prefer Python or need quick scripting for behavior logic.
- Mirrors some capabilities found in the C++ trees package.
-
manymove_hmi- Implements a basic Human–Machine Interface (HMI).
- Provides a GUI (
hmi_gui) and related tools (ros2_worker) so that operators can issue commands, monitor status, or set parameters. - Can be integrated with the behavior trees (or any other logic) to pause, stop, or resume execution.
-
manymove_bringup- Contains the launchers for the complete multi-package examples listed below (and more).
Examples
Launching the Examples
- Lite6, uf850 and xarm7 manipulators with MoveItCPP and BehaviorTree.CPP:
ros2 launch manymove_bringup lite_moveitcpp_fake_cpp_trees.launch.py
with MoveItCPP and BehaviorTree.CPP:
ros2 launch manymove_bringup uf850_moveitcpp_fake_cpp_trees.launch.py
with MoveItCPP and BehaviorTree.CPP:
ros2 launch manymove_bringup xarm7_moveitcpp_fake_cpp_trees.launch.py
with MoveGroupInterface and BehaviorTree.CPP:
ros2 launch manymove_bringup lite_movegroup_fake_cpp_trees.launch.py
ros2 launch manymove_bringup uf850_movegroup_fake_cpp_trees.launch.py
ros2 launch manymove_bringup xarm7_movegroup_fake_cpp_trees.launch.py
with MoveGroupInterface and py_trees (minimal):
ros2 launch manymove_bringup lite_movegroup_fake_py_trees.launch.py
- Dual robot (Lite 6 + UF850)
ros2 launch manymove_bringup dual_moveitcpp_fake_cpp_trees.launch.py
-
Panda Manipulator (requires the installation of moveit2_tutorials )
Standalone launchers for MoveItCPP or MoveGroup with Panda robot (you need the moveit2_tutorials package sourced):
with BehaviorTree.CPP:
ros2 launch manymove_bringup panda_moveitcpp_fake_cpp_trees.launch.py
ros2 launch manymove_bringup panda_movegroup_fake_cpp_trees.launch.py
with py_trees:
ros2 launch manymove_bringup panda_movegroup_fake_py_trees.launch.py
Alternative with standard panda demo launch and manymove started from a separate launcher:
In terminal 1 (with moveit2_tutorials installed and sourced):
ros2 launch moveit2_tutorials demo.launch.py
In terminal 2, with MoveGroupInterface and BehaviorTree.CPP:
ros2 launch manymove_planner panda_fake_cpp_trees.launch.py
Alternative: in terminal 2, with MoveGroupInterface and py_trees (minimal):
ros2 launch manymove_planner panda_fake_py_trees.launch.py
These launch files spin up the appropriate environment (fake or real) plus the nodes that handle planning, object management, signals, and optional HMI components. You can then interact with these action servers and send them requests using the provided C++ or Python-based behavior tree clients.
For launchers that use NVIDIA cuMotion planning library, refer to THIS POST on NVIDIA Developers Forums.
Credits
-
BehaviorTree.CPP v3.8 installed through ROS dependencies (
ros-humble-behaviortree-cpp-v3)
and its visualizer Groot.- Groot is to be installed manually following the instructions in the github page
- py_trees_ros from splintered-reality/py_trees_ros, installed through ROS dependencies, including its visualizer ros-humble-py-trees-ros-viewer.
- The MoveIt 2 community and xarm_ros2 on GitHub for the underlying robot drivers and examples.
Notes & Disclaimer
- Experimental: This entire project is under development and may change rapidly.
- No Safety Features: Robot safety must be handled by separate hardware or controller-level solutions.
- Feedback Welcome: Please open an issue or pull request if you find improvements or have suggestions.
Enjoy experimenting with ManyMove in your ROS2 environment, but remember to keep safety a top priority!