
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro humble. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro rolling. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy algorithms diffdrive_bringup diffdrive_description tracked_vehicle_interfaces tracked_vehicle_simulation tracks_controller |
|
|
Repository Summary
| Description | Mobile robots playground |
| Checkout URI | https://github.com/wiktor-99/mobile_robots_playground.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-03-20 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | mobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| algorithms | 0.0.0 |
| diffdrive_bringup | 1.0.0 |
| diffdrive_description | 1.0.0 |
| tracked_vehicle_interfaces | 1.0.0 |
| tracked_vehicle_simulation | 1.0.0 |
| tracks_controller | 1.0.0 |
README
Mobile robots playground
Repo contains experiments with mobile robots. Currently repo contains:
- Nav 2 support
- Simple Diff drive robot simulation with:
- Lidar slam
- RGLGazeboPlugin
- Tracked vehicle simulation
How to set up
Clone repo with submodules:
git clone --recurse-submodules
To run in devcontainer you need to:
- Download NVidia OptiX 7.2.
- Add following to .bashrc
export OptiX_INSTALL_DIR=<your-OptiX-path>. - Open repo in the devcontainer via vscode .with devcontainer plugin.
- Run following commands.
colcon build && source install/setup.bash
export GZ_SIM_SYSTEM_PLUGIN_PATH=`pwd`/install/RGLGazeboPlugin/RGLServerPlugin:$GZ_SIM_SYSTEM_PLUGIN_PATH
export GZ_GUI_PLUGIN_PATH=`pwd`/install/RGLGazeboPlugin/RGLVisualize:$GZ_GUI_PLUGIN_PATH
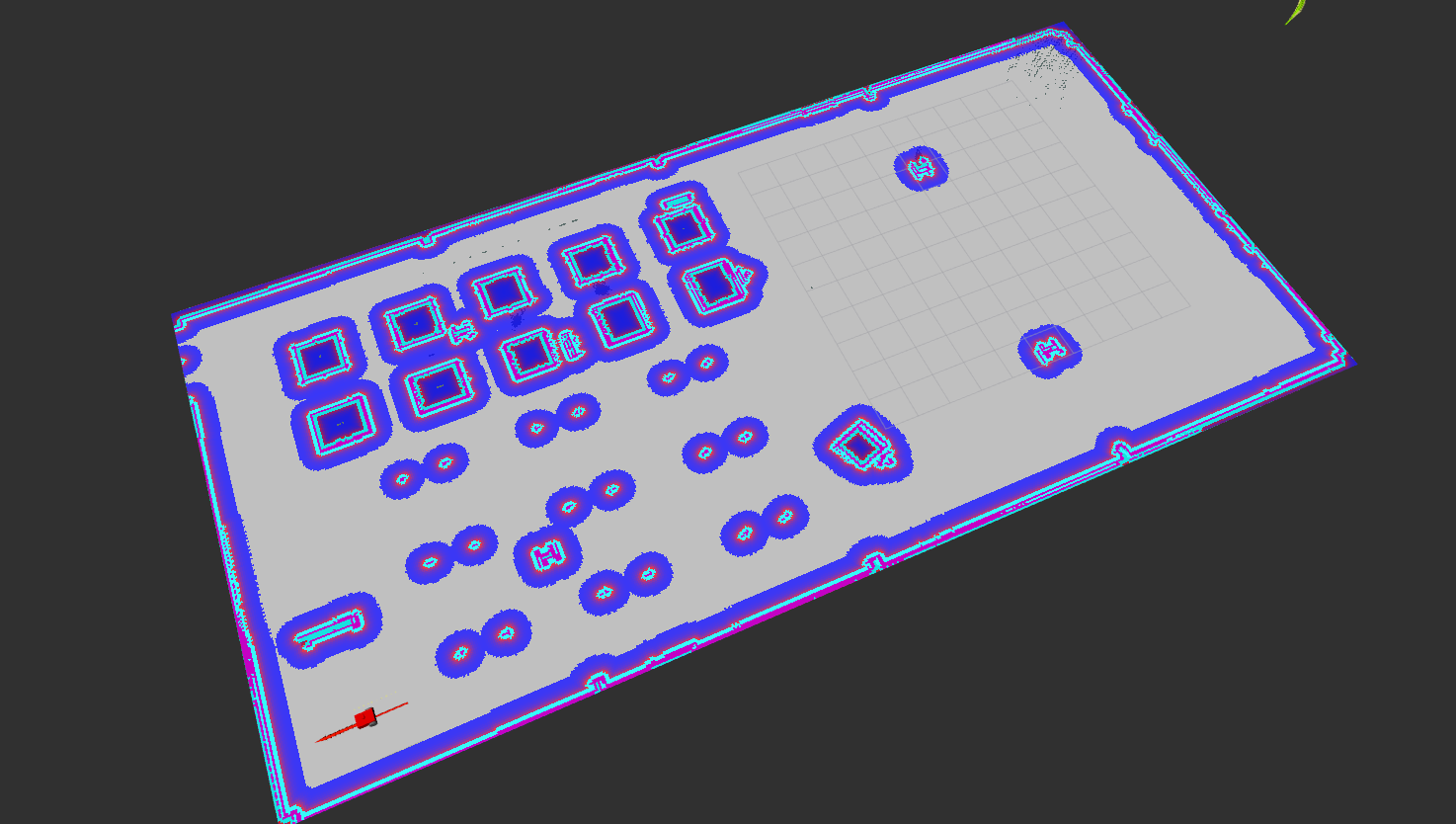
Nav 2
To start Nav 2 just run
ros2 launch diffdrive_bringup diffdrive_bringup.launch.py
Results of mapping with nav2
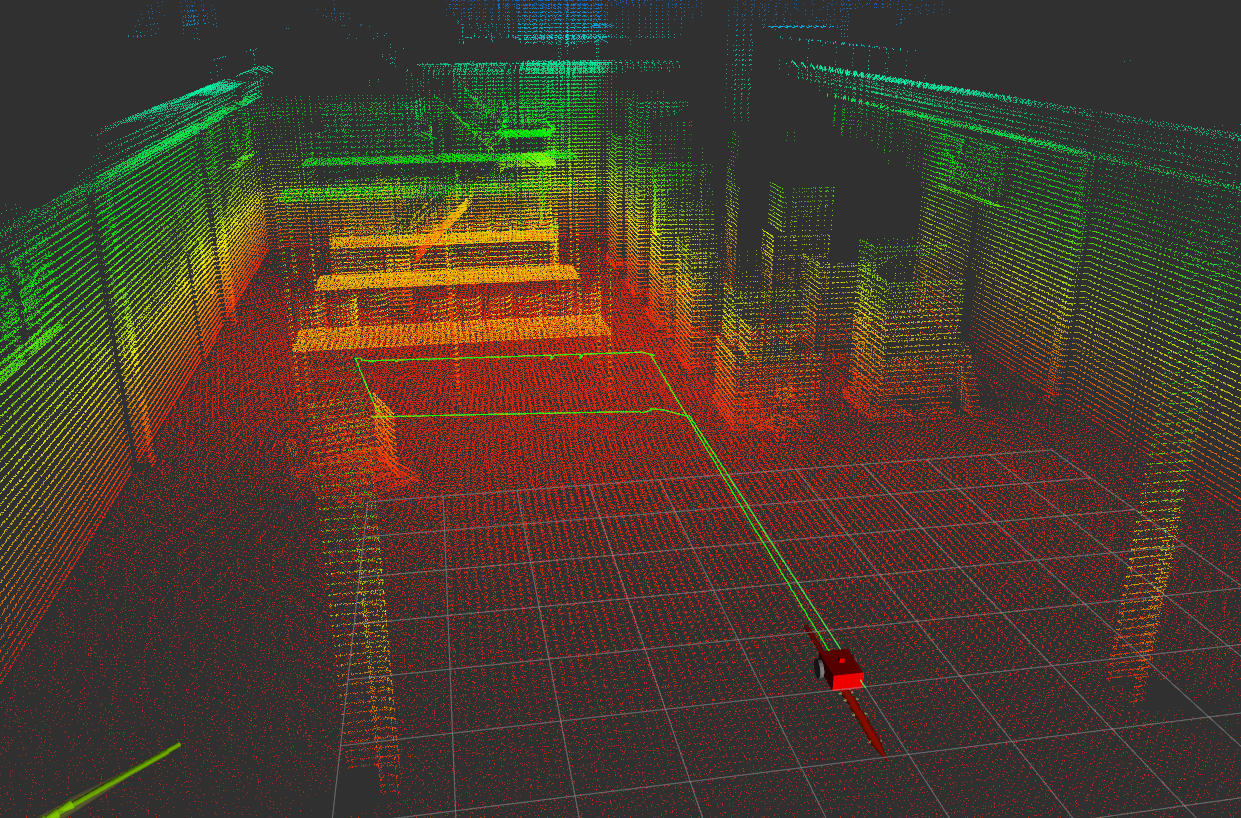
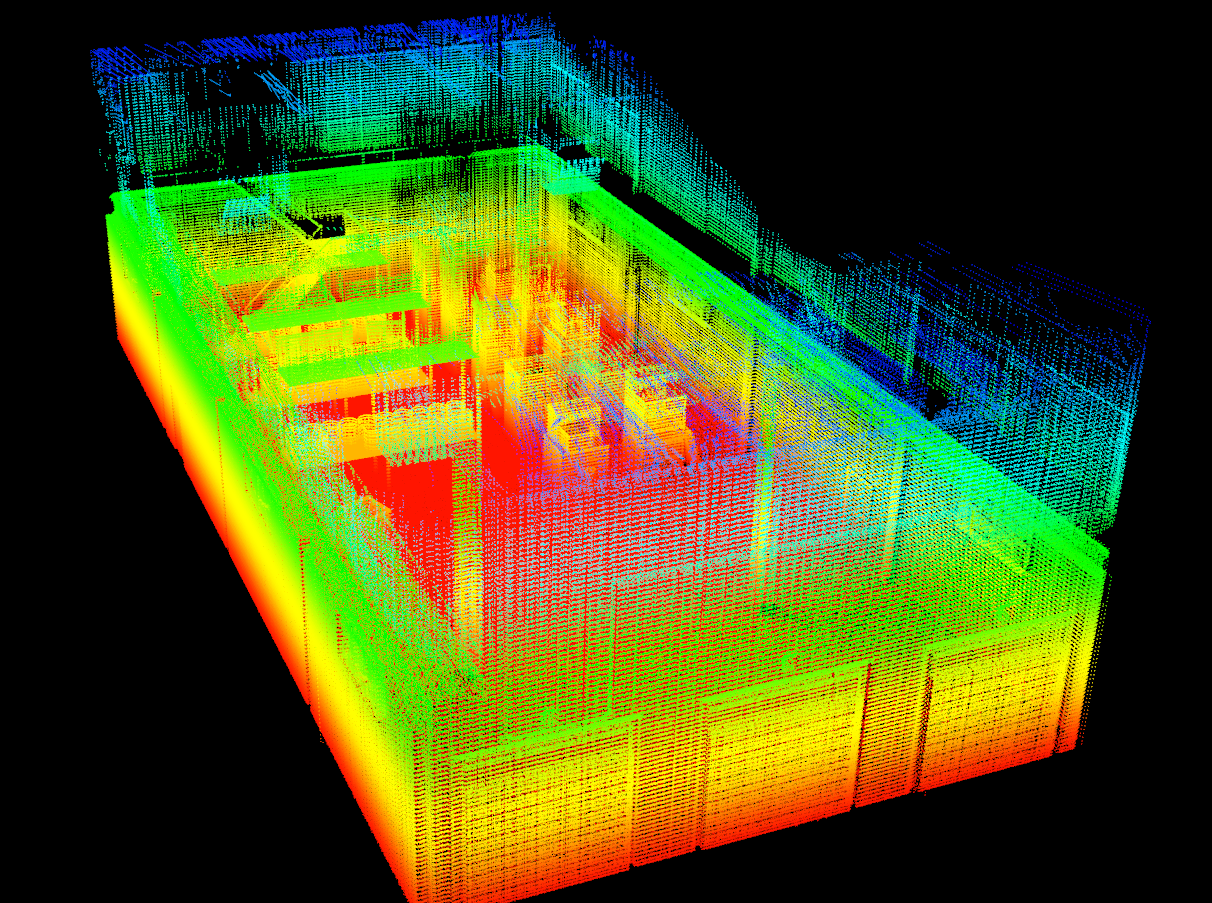
How to run diffdrive simulation with lidar slam
In the first terminal run:
ros2 launch diffdrive_bringup diffdrive_bringup.launch.py use_lidar_slam:=True
In the third terminal:
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -p stamped:=True
To save the map use:
ros2 service call /map_save std_srvs/Empty
Results of mapping with lidar slam
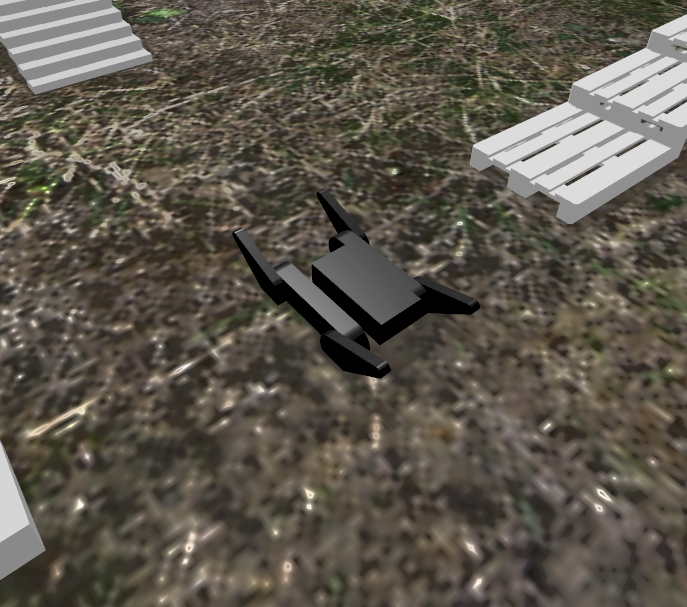
How to run tracked vehicle simulation
Just build the whole project or following packages with packages-select option:
- tracked_vehicle_interfaces
- tracked_vehicle_simulation
- tracks_controller
Run simulation with
ros2 launch tracked_vehicle_simulation tracked_vehicle_bringup.launch.py
Tracked vehicle simulation
CONTRIBUTING
No CONTRIBUTING.md found.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro noetic. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro ardent. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro crystal. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro dashing. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro galactic. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro foxy. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro iron. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro lunar. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro jade. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro indigo. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro hydro. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro kinetic. Known supported distros are highlighted in the buttons above.
|
|
mobile_robots_playground repositorymobile-robotics ros2 ekf-localization slam-algorithms 3d-lidar gazebo-simulator nav2 ros2-jazzy |
|
|
No version for distro melodic. Known supported distros are highlighted in the buttons above.