
|
|
Repository Summary
| Description | A Fleet of Unitree GOs (GO1 and GO2) capable of Heterogeneous Collaborative Exploration. |
| Checkout URI | https://github.com/sayantani-bhattacharya/multi-hetero-agent-exploration-on-unitreegos.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-25 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| go1_description | 0.0.0 |
| go2_description | 1.0.0 |
| go2_exploration | 0.0.0 |
| go2_exploration_interfaces | 0.0.0 |
| ros2_unitree_legged_msgs | 0.4.0 |
| unitree_exploration | 0.0.0 |
| unitree_legged_real | 0.0.0 |
| unitree_nav | 0.0.0 |
| unitree_nav_interfaces | 0.0.0 |
| unitree_nav_launch_module | 0.0.0 |
README
Multi Hetero Agent Exploration by Unitree GOs
Author: Sayantani Bhattacharya
Project Overview
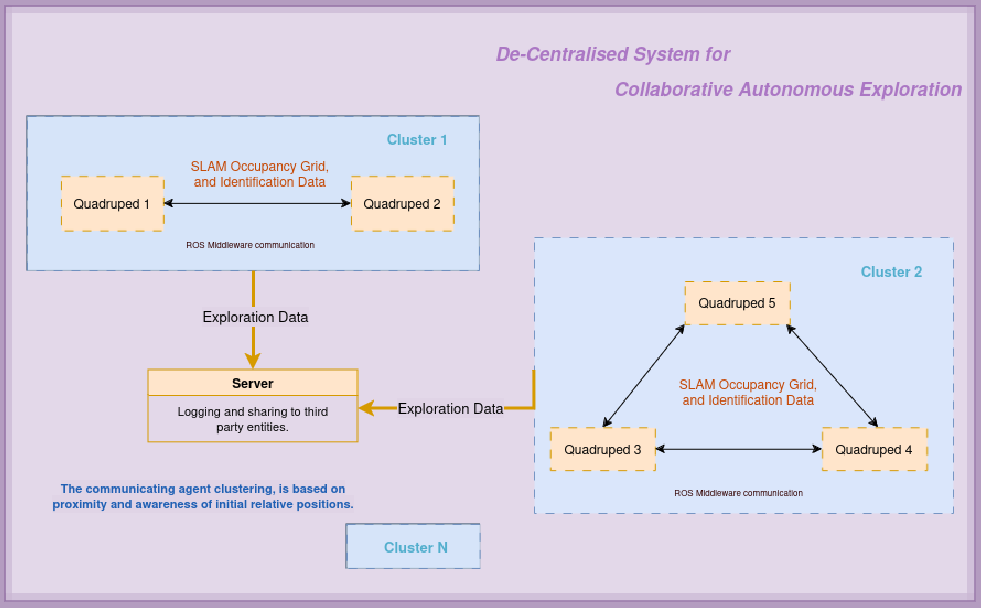
In times of disaster, every second counts, and reaching survivors in hazardous terrains poses significant challenges. Imagine a coordinated team of agile, four-legged robots, working together to navigate treacherous environments like dense forests or mines. These quadrupedal robots autonomously perform simultaneous localization and mapping (SLAM), creating real-time detailed maps of their surroundings. By employing decentralized collaborative system, these robots can share and merge their individual maps, creating a comprehensive understanding of the complete area without relying on a central system. This approach enhances the robustness and speed of search operations, as the failure of a single unit does not compromise the entire mission. Quadrupeds inherently work well in uneven terrains, and harnessing the strengths of SLAM to explore unmapped areas with LIDAR and Visual-Inertial sensor data, these robotic swarms represent a leap forward in disaster response, offering hope and assistance when it’s needed most. By all means this is just the first iteration and needs good work for being deployable onsite. </br> For more details about the project plese refer my Portfolio Post
Block diagram
- Complete system:</br>
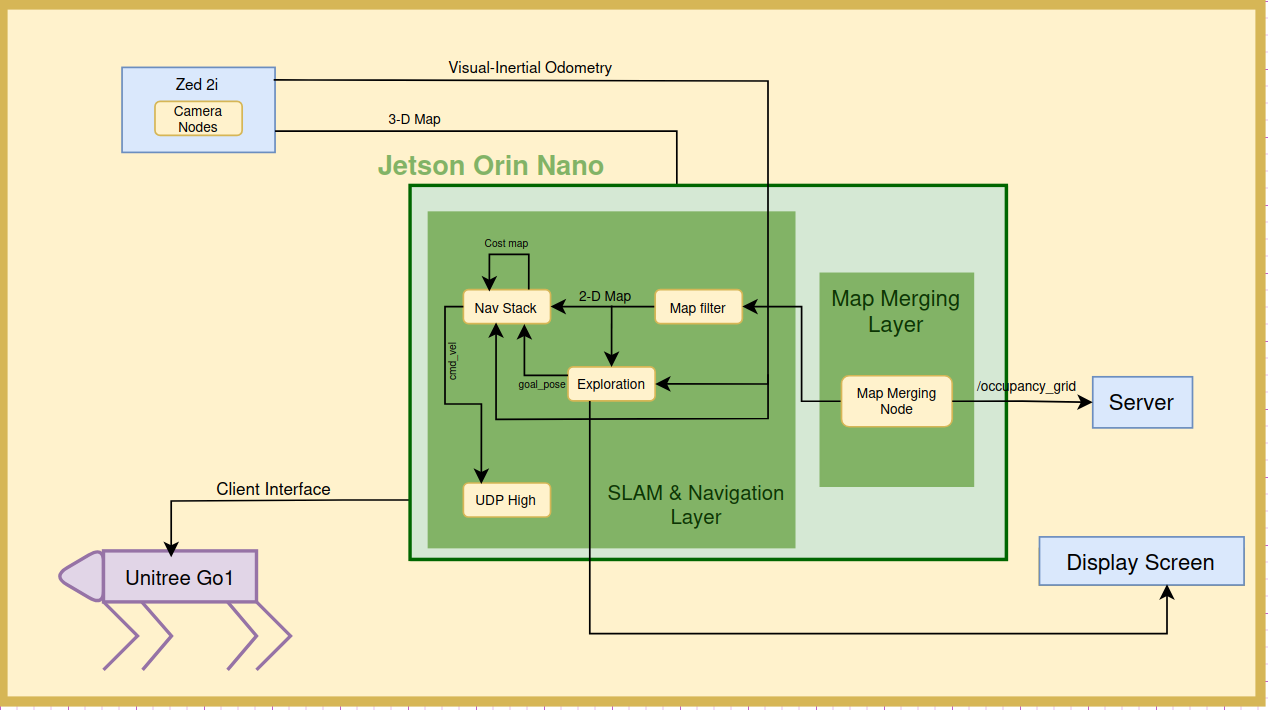
- System Architecture of GO2:</br>

- System Architecture of GO1:</br>
Tools and References:
Hardware:
- Unitree GO1 & GO2.
- Zed 2i Camera & On-board 4D Lidar.
- Jetson Orin Nano.
- buck-convertor (24V->12V).
- 3D print the mount for unitree.
- Display port adapters for Jetson.
- Ethernet cable for initial testing with unitree sdk.
- Micro SD cards.
Software :
- C++
- ROS2 Jazzy and Humble
- Python
- Unitree SDK - GO1 and GO2
- Zed SDK
- Slam, RTabMap, and Nav2 pkg
<!– ### Reference repositories:
- Unitree Package abstracted layer developed by Nick Morales, Marno Nel, and Katie Hughes: https://github.com/ngmor/unitree_nav
- Unitree ros2 wrapper: https://github.com/katie-hughes/unitree_ros2
- Visual slam route: https://github.com/GogiPuttar/Search-and-Rescue_Robot_Dog_Unitree_Go1
- Graph based slam route: https://roy2909.github.io/Exploration/
Reference papers for collaborative exploration:
-
Awesome paper: https://arxiv.org/pdf/2108.08325 Has a lot of references, inside: see the annotations. - Paper of 12 drone c-slam, with github code: http://arxiv.org/pdf/2108.05756
- C-SLAM subproblems such as map merging (Lee et al., 2012), practical implementations (Kshirsagar et al., 2018), particle filter techniques.
- ICRA 2023: generalized back-end for c-slam https://www.youtube.com/watch?v=oypURkSuMc4
ROS2-SDK setup for Unitree GO1
ROS2 was set up by cloning and following the instructions for this repository.
ROS2 Packages
go1_description
Holds all the models for visualizing the Unitree Go1 in RViz and simulation in Gazebo.
go2_description
Holds all the models for visualizing the Unitree Go2 in RViz and simulation in Gazebo.
ros2_unitree_legged_msgs
Messages and services for controlling Unitree Go1.
unitree_exploration
Frontier Exploration with the Unitree Go1. Takes in the map, finds frontiers and commands 2-D goal poses to the Nav Stack accordingly.
unitree_kinematics
Library for kinematic calculations for controlling the Go1.
unitree_nav
Package for code and launch files for running the Unitree Go1 in high level mode with ROS 2 Humble.
unitree_legged_real
Holds the launch files for Zed 2i camera nodes, controlling, visualisation and exploration of Unitree Go1.