
Repository Summary
| Description | Using Nav2 for navigating a simulated Turtlebot 3 in the Ignition Gazebo simulator. |
| Checkout URI | https://github.com/onicc/navigation2_ignition_gazebo_turtlebot3.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-08-02 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| turtlebot3 | 0.0.0 |
README
navigation2_ignition_gazebo_turtlebot3
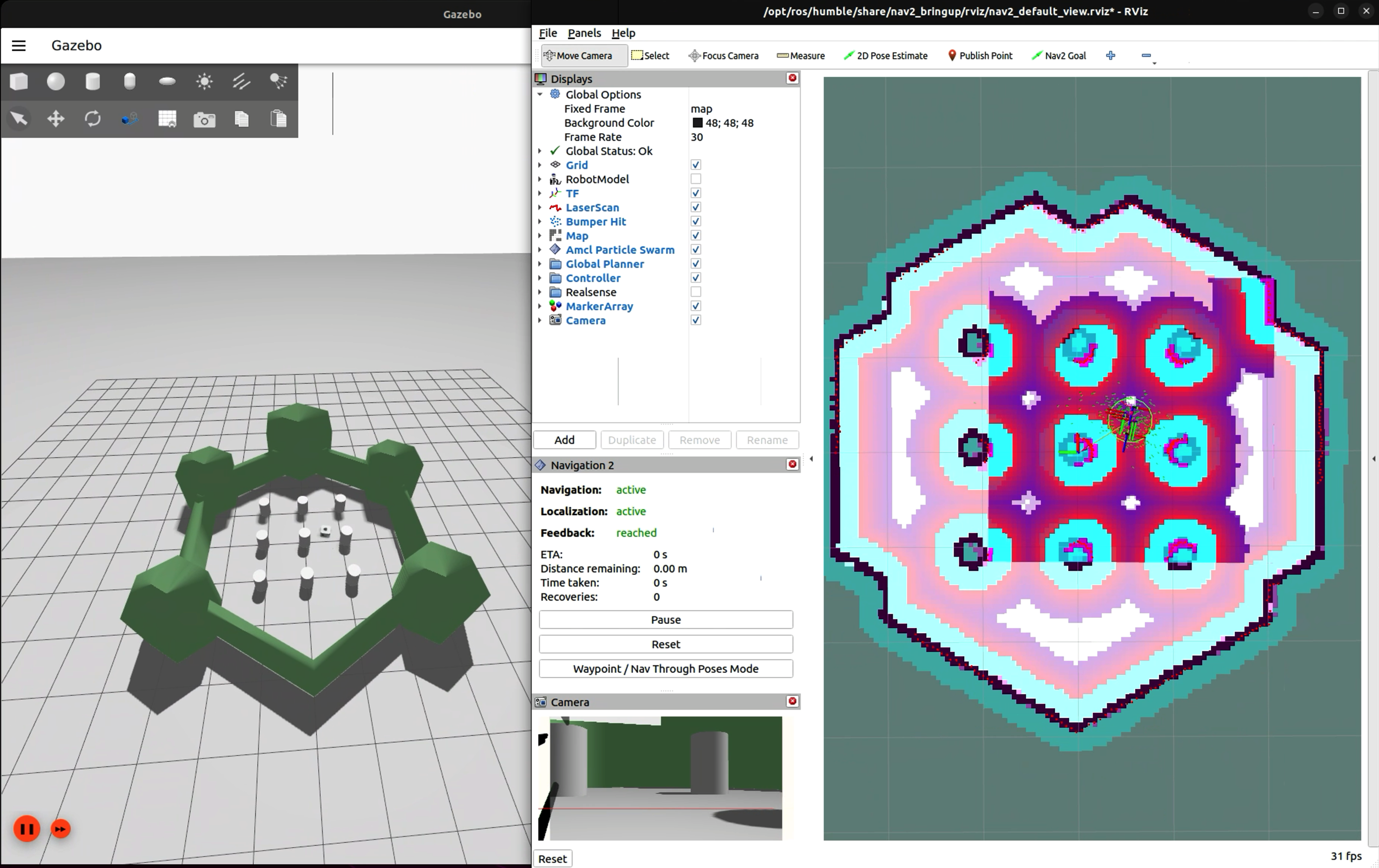
Using Nav2 for navigating a simulated Turtlebot 3 in the Ignition Gazebo simulator.
ROS_LOCALHOST_ONLY=1 TURTLEBOT3_MODEL=waffle ros2 launch turtlebot3 simulation.launch.py to launch simulation, nav2, and rviz2 simultaneously.
/odom topic, odom frame, and /odom/tf (tf topic) are defined in model.sdf. The transformation of base_footprint in the odom frame is published through /odom/tf. /odom topic publishes the transformation of odom frame in the map frame.
Use ros2 run tf2_tools view_frames to see the tf frame relations.
Ign gazebo publishes joint_states, which is then translated to ROS2 topic via ros_ign_bridge, and consumed by robot_state_publisher (a ROS2 node) for computing/publishing most of tf.
/odom/tf is remapped to /tf.
Ign gazebo topics are translated to/from ROS2 topics via ros_ign_bridge.
nav2_bringup is called to initiate basic services and configurations.
Tested with Ignition Gazebo Fortress and ROS2 Humble.
Requires
ros-<distro>-navigation2ros-<distro>-nav2-bringupros-<distro>-ros-ign-gazeboros-<distro>-ros-ign-bridge