
|
pal_statistics repositoryreal-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers pal_carbon_collector pal_statistics pal_statistics_msgs |
|
|
Repository Summary
| Description | A way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS/ROS2 |
| Checkout URI | https://github.com/pal-robotics/pal_statistics.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-05-22 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | real-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| pal_carbon_collector | 1.4.0 |
| pal_statistics | 2.6.2 |
| pal_statistics_msgs | 2.6.2 |
README
PAL Statistics Framework

The PAL Statistics Framework provides a way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS. From internal variables values to high level statistics about, but not limited to, robot performance.
Data logging
To log a variable, it must be registered with a name to a topic. Registering can be as easy as:
double my_variable = 3.0;
REGISTER_VARIABLE(node, "/statistics_topic", "my_variable_name", &my_variable);
To publish all variables registered to a topic:
PUBLISH_STATISTICS(node, "/statistics_topic");
And to unregister:
UNREGISTER_VARIABLE(node, "/statistics_topic", "my_variable_name");
Data transmission and storing
Data is sent via ROS topics of type pal_statistics_msgs/Statistics which basically is an array of names/doubles.
Data can be stored as rosbags, like all ros topics. It’s also designed to be integrated with Graphite, which is:
Graphite is an enterprise-ready monitoring tool that runs equally well on cheap hardware or Cloud infrastructure. Teams use Graphite to track the performance of their websites, applications, business services, and networked servers. It marked the start of a new generation of monitoring tools, making it easier than ever to store, retrieve, share, and visualize time-series data.
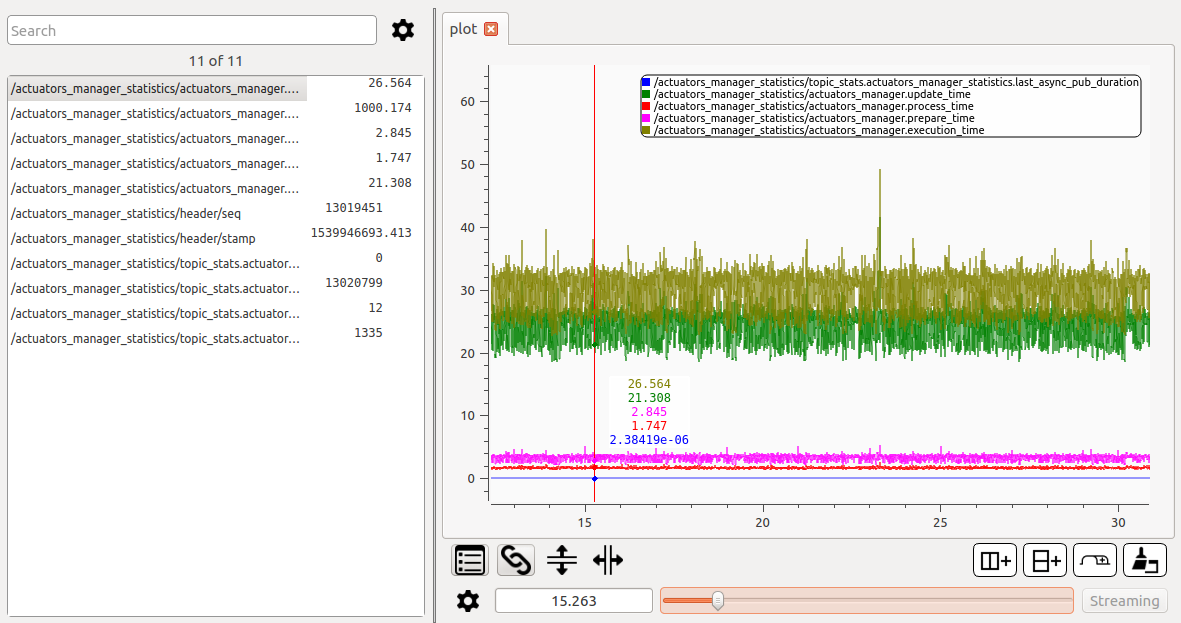
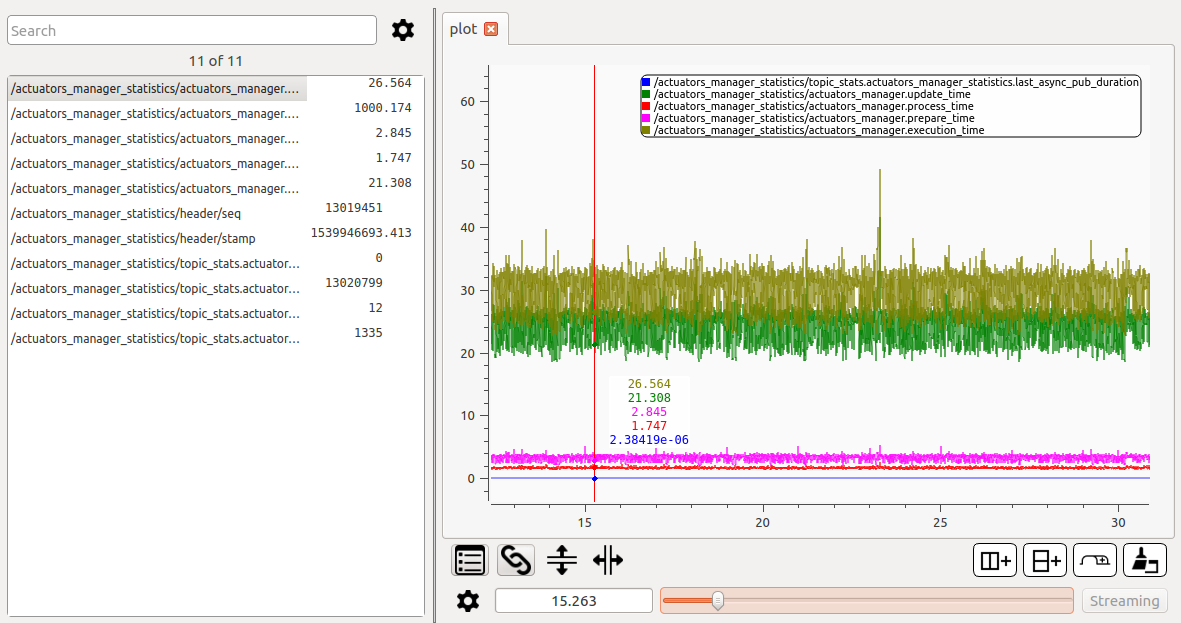
Data visualization
Data can be visualized with any tools that display ROS topics, but we recommend PlotJuggler for viewing high resolution live data, or data in bags.
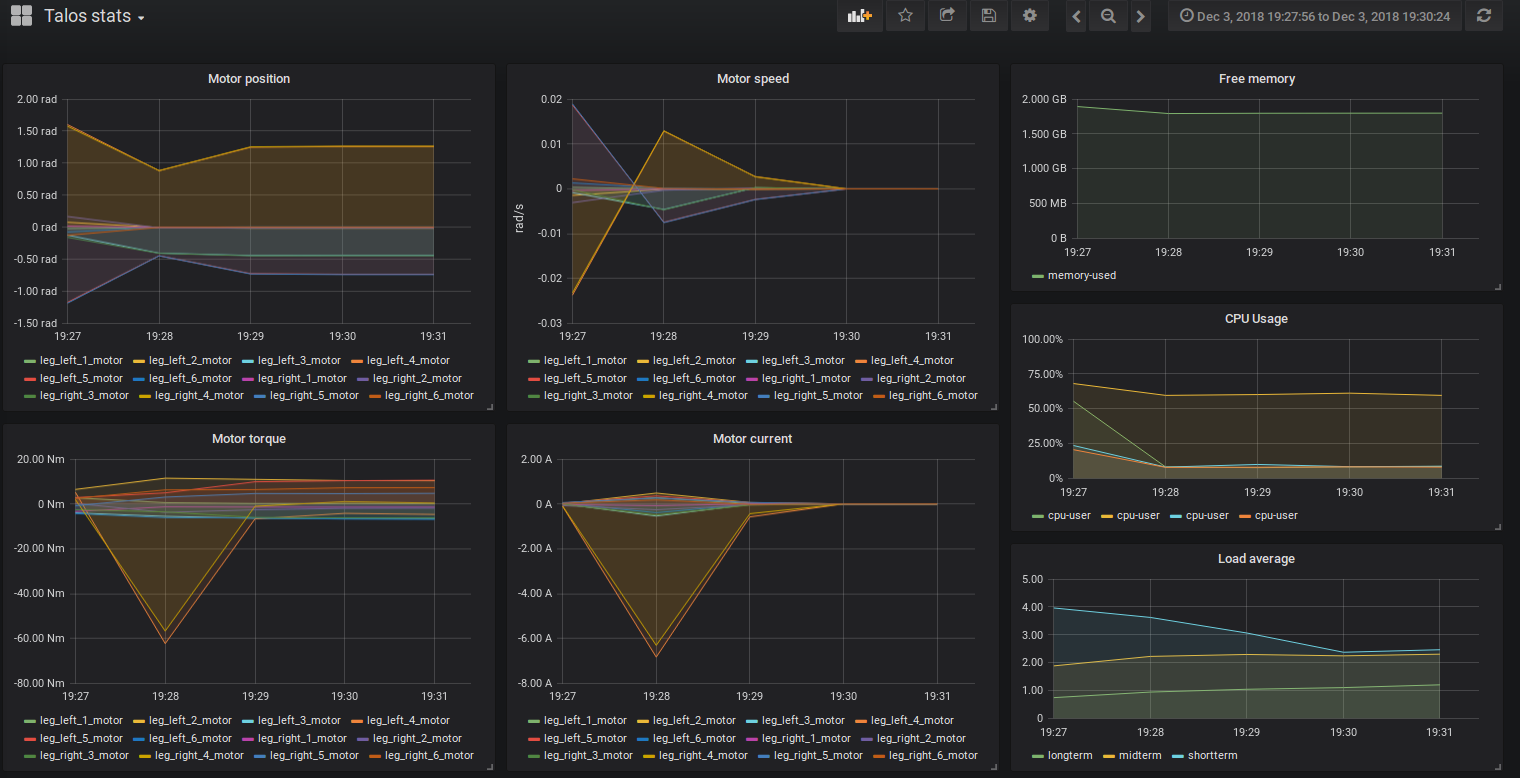
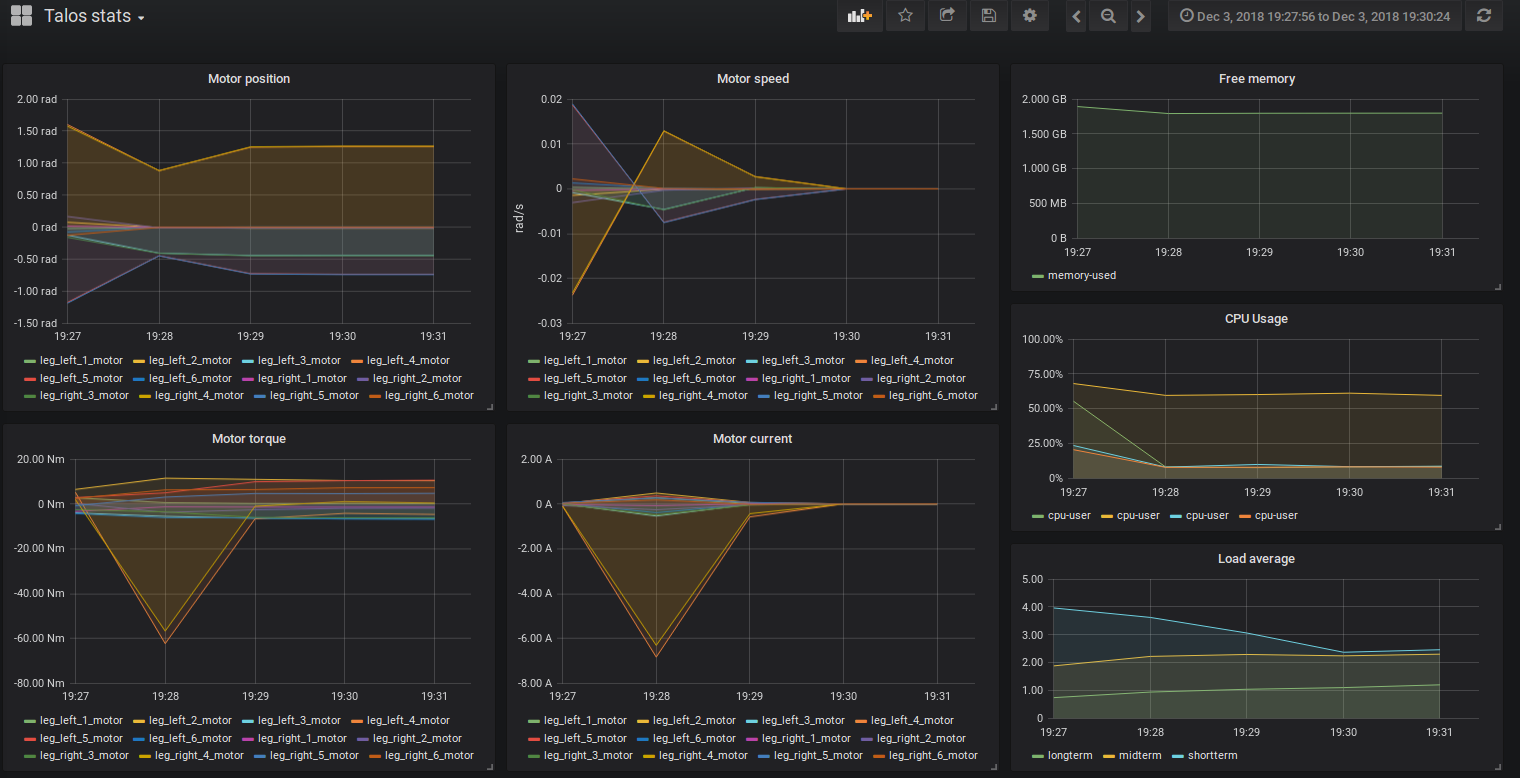
Or you can view historic data via Grafana
Tutorials
The tutorials for ROS are hosted on the ROS wiki. In ROS 2 there are some changes, but it’s similar. The node must be added as the first argument when using the macros.
Acknowledgements
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
pal_statistics repositoryreal-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers pal_carbon_collector pal_statistics pal_statistics_msgs |
|
|
Repository Summary
| Description | A way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS/ROS2 |
| Checkout URI | https://github.com/pal-robotics/pal_statistics.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-05-22 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | real-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| pal_carbon_collector | 1.4.0 |
| pal_statistics | 2.6.2 |
| pal_statistics_msgs | 2.6.2 |
README
PAL Statistics Framework
The PAL Statistics Framework provides a way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS. From internal variables values to high level statistics about, but not limited to, robot performance.
Data logging
To log a variable, it must be registered with a name to a topic. Registering can be as easy as:
double my_variable = 3.0;
REGISTER_VARIABLE(node, "/statistics_topic", "my_variable_name", &my_variable);
To publish all variables registered to a topic:
PUBLISH_STATISTICS(node, "/statistics_topic");
And to unregister:
UNREGISTER_VARIABLE(node, "/statistics_topic", "my_variable_name");
Data transmission and storing
Data is sent via ROS topics of type pal_statistics_msgs/Statistics which basically is an array of names/doubles.
Data can be stored as rosbags, like all ros topics. It’s also designed to be integrated with Graphite, which is:
Graphite is an enterprise-ready monitoring tool that runs equally well on cheap hardware or Cloud infrastructure. Teams use Graphite to track the performance of their websites, applications, business services, and networked servers. It marked the start of a new generation of monitoring tools, making it easier than ever to store, retrieve, share, and visualize time-series data.
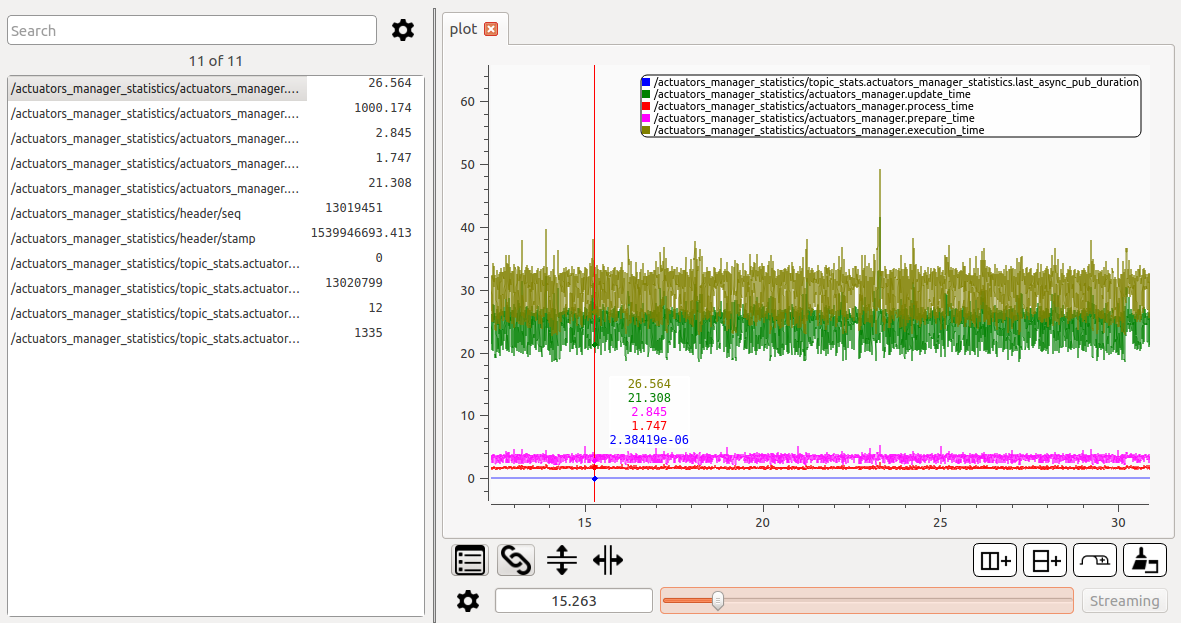
Data visualization
Data can be visualized with any tools that display ROS topics, but we recommend PlotJuggler for viewing high resolution live data, or data in bags.
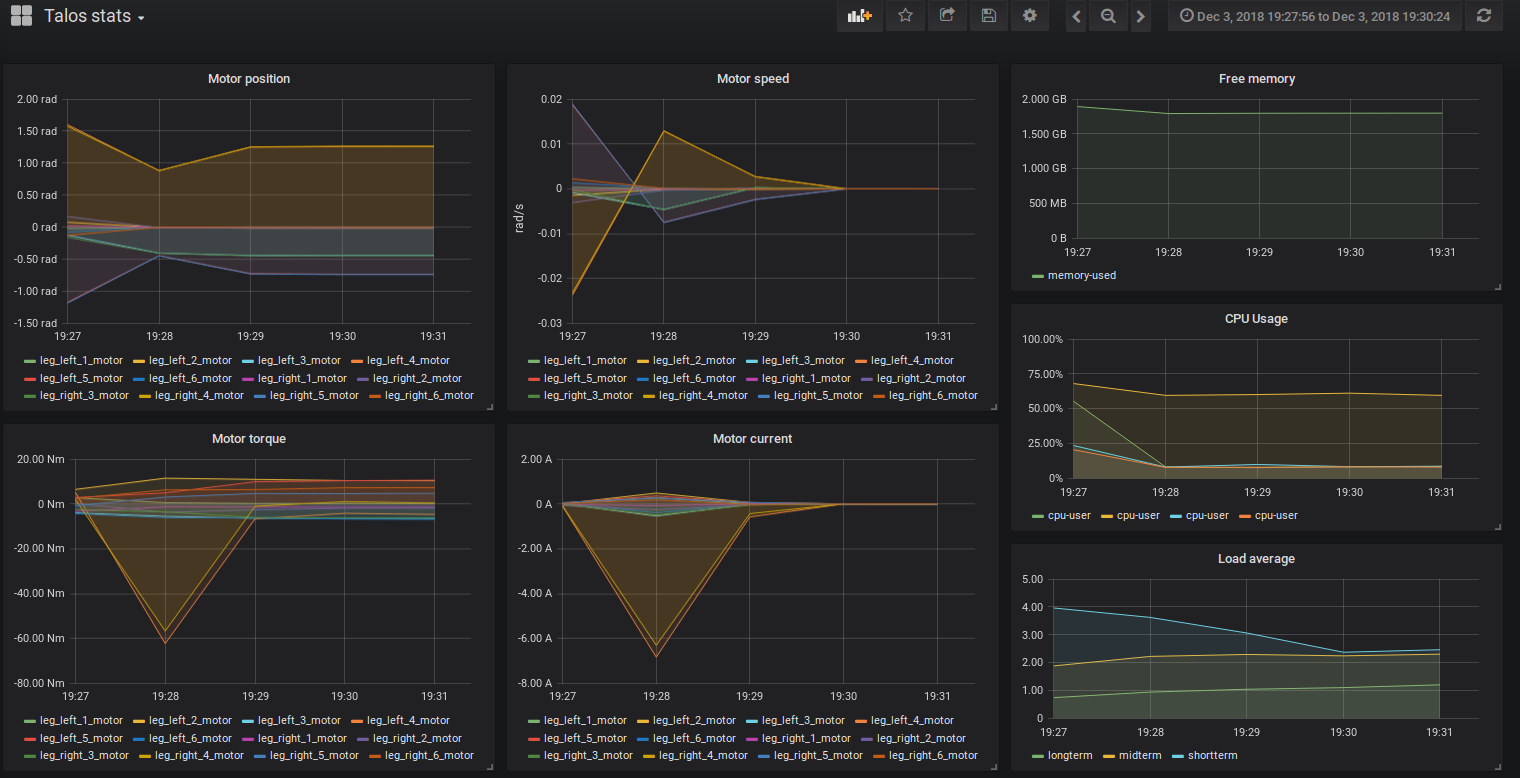
Or you can view historic data via Grafana
Tutorials
The tutorials for ROS are hosted on the ROS wiki. In ROS 2 there are some changes, but it’s similar. The node must be added as the first argument when using the macros.
Acknowledgements
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
pal_statistics repositoryreal-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers pal_carbon_collector pal_statistics pal_statistics_msgs |
|
|
Repository Summary
| Description | A way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS/ROS2 |
| Checkout URI | https://github.com/pal-robotics/pal_statistics.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-05-22 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | real-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| pal_carbon_collector | 1.4.0 |
| pal_statistics | 2.6.2 |
| pal_statistics_msgs | 2.6.2 |
README
PAL Statistics Framework
The PAL Statistics Framework provides a way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS. From internal variables values to high level statistics about, but not limited to, robot performance.
Data logging
To log a variable, it must be registered with a name to a topic. Registering can be as easy as:
double my_variable = 3.0;
REGISTER_VARIABLE(node, "/statistics_topic", "my_variable_name", &my_variable);
To publish all variables registered to a topic:
PUBLISH_STATISTICS(node, "/statistics_topic");
And to unregister:
UNREGISTER_VARIABLE(node, "/statistics_topic", "my_variable_name");
Data transmission and storing
Data is sent via ROS topics of type pal_statistics_msgs/Statistics which basically is an array of names/doubles.
Data can be stored as rosbags, like all ros topics. It’s also designed to be integrated with Graphite, which is:
Graphite is an enterprise-ready monitoring tool that runs equally well on cheap hardware or Cloud infrastructure. Teams use Graphite to track the performance of their websites, applications, business services, and networked servers. It marked the start of a new generation of monitoring tools, making it easier than ever to store, retrieve, share, and visualize time-series data.
Data visualization
Data can be visualized with any tools that display ROS topics, but we recommend PlotJuggler for viewing high resolution live data, or data in bags.
Or you can view historic data via Grafana
Tutorials
The tutorials for ROS are hosted on the ROS wiki. In ROS 2 there are some changes, but it’s similar. The node must be added as the first argument when using the macros.
Acknowledgements
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
pal_statistics repositoryreal-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers pal_carbon_collector pal_statistics pal_statistics_msgs |
|
|
Repository Summary
| Description | A way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS/ROS2 |
| Checkout URI | https://github.com/pal-robotics/pal_statistics.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-05-22 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | real-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| pal_carbon_collector | 1.4.0 |
| pal_statistics | 2.6.2 |
| pal_statistics_msgs | 2.6.2 |
README
PAL Statistics Framework
The PAL Statistics Framework provides a way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS. From internal variables values to high level statistics about, but not limited to, robot performance.
Data logging
To log a variable, it must be registered with a name to a topic. Registering can be as easy as:
double my_variable = 3.0;
REGISTER_VARIABLE(node, "/statistics_topic", "my_variable_name", &my_variable);
To publish all variables registered to a topic:
PUBLISH_STATISTICS(node, "/statistics_topic");
And to unregister:
UNREGISTER_VARIABLE(node, "/statistics_topic", "my_variable_name");
Data transmission and storing
Data is sent via ROS topics of type pal_statistics_msgs/Statistics which basically is an array of names/doubles.
Data can be stored as rosbags, like all ros topics. It’s also designed to be integrated with Graphite, which is:
Graphite is an enterprise-ready monitoring tool that runs equally well on cheap hardware or Cloud infrastructure. Teams use Graphite to track the performance of their websites, applications, business services, and networked servers. It marked the start of a new generation of monitoring tools, making it easier than ever to store, retrieve, share, and visualize time-series data.
Data visualization
Data can be visualized with any tools that display ROS topics, but we recommend PlotJuggler for viewing high resolution live data, or data in bags.
Or you can view historic data via Grafana
Tutorials
The tutorials for ROS are hosted on the ROS wiki. In ROS 2 there are some changes, but it’s similar. The node must be added as the first argument when using the macros.
Acknowledgements
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
pal_statistics repositoryreal-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers |
|
|
|
|
pal_statistics repositoryreal-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers pal_carbon_collector pal_statistics pal_statistics_msgs |
|
|
Repository Summary
| Description | A way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS/ROS2 |
| Checkout URI | https://github.com/pal-robotics/pal_statistics.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2024-06-18 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | real-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| pal_carbon_collector | 1.5.2 |
| pal_statistics | 1.5.2 |
| pal_statistics_msgs | 1.5.2 |
README
PAL Statistics Framework
The PAL Statistics Framework provides a way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS. From internal variables values to high level statistics about, but not limited to, robot performance.
Data logging
To log a variable, it must be registered with a name to a topic. Registering can be as easy as:
double my_variable = 3.0;
REGISTER_VARIABLE("/statistics_topic", "my_variable_name", &my_variable);
To publish all variables registered to a topic:
PUBLISH_STATISTICS("/statistics_topic");
And to unregister:
UNREGISTER_VARIABLE("/statistics_topic", "my_variable_name");
Data transmission and storing
Data is sent via ROS topics of type pal_statistics_msgs/Statistics which basically is an array of names/doubles.
Data can be stored as rosbags, like all ros topics. It’s also designed to be integrated with Graphite, which is:
Graphite is an enterprise-ready monitoring tool that runs equally well on cheap hardware or Cloud infrastructure. Teams use Graphite to track the performance of their websites, applications, business services, and networked servers. It marked the start of a new generation of monitoring tools, making it easier than ever to store, retrieve, share, and visualize time-series data.
Data visualization
Data can be visualized with any tools that display ROS topics, but we recommend PlotJuggler for viewing high resolution live data, or data in bags.
Or you can view historic data via Grafana
Tutorials
The tutorials are hosted on the ROS wiki
Acknowledgements
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
pal_statistics repositoryreal-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers pal_carbon_collector pal_statistics pal_statistics_msgs |
|
|
Repository Summary
| Description | A way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS/ROS2 |
| Checkout URI | https://github.com/pal-robotics/pal_statistics.git |
| VCS Type | git |
| VCS Version | galactic-devel |
| Last Updated | 2022-09-05 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | real-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| pal_carbon_collector | 1.4.0 |
| pal_statistics | 2.1.2 |
| pal_statistics_msgs | 2.1.2 |
README
PAL Statistics Framework
The PAL Statistics Framework provides a way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS. From internal variables values to high level statistics about, but not limited to, robot performance.
Data logging
To log a variable, it must be registered with a name to a topic. Registering can be as easy as:
double my_variable = 3.0;
REGISTER_VARIABLE("/statistics_topic", "my_variable_name", &my_variable);
To publish all variables registered to a topic:
PUBLISH_STATISTICS("/statistics_topic");
And to unregister:
UNREGISTER_VARIABLE("/statistics_topic", "my_variable_name");
Data transmission and storing
Data is sent via ROS topics of type pal_statistics_msgs/Statistics which basically is an array of names/doubles.
Data can be stored as rosbags, like all ros topics. It’s also designed to be integrated with Graphite, which is:
Graphite is an enterprise-ready monitoring tool that runs equally well on cheap hardware or Cloud infrastructure. Teams use Graphite to track the performance of their websites, applications, business services, and networked servers. It marked the start of a new generation of monitoring tools, making it easier than ever to store, retrieve, share, and visualize time-series data.
Data visualization
Data can be visualized with any tools that display ROS topics, but we recommend PlotJuggler for viewing high resolution live data, or data in bags.
Or you can view historic data via Grafana
Tutorials
The tutorials are hosted on the ROS wiki
Acknowledgements
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
pal_statistics repositoryreal-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers |
|
|
|
|
pal_statistics repositoryreal-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers pal_carbon_collector pal_statistics pal_statistics_msgs |
|
|
Repository Summary
| Description | A way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS/ROS2 |
| Checkout URI | https://github.com/pal-robotics/pal_statistics.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2024-06-18 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | real-time statistics ros introspection ros-control ros2 quantification-evaluation-methods ros-controllers |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| pal_carbon_collector | 1.5.2 |
| pal_statistics | 1.5.2 |
| pal_statistics_msgs | 1.5.2 |
README
PAL Statistics Framework
The PAL Statistics Framework provides a way of gathering, aggregating, storing and visualizing statistics from arbitrary sources in a flexible and real-time safe way in ROS. From internal variables values to high level statistics about, but not limited to, robot performance.
Data logging
To log a variable, it must be registered with a name to a topic. Registering can be as easy as:
double my_variable = 3.0;
REGISTER_VARIABLE("/statistics_topic", "my_variable_name", &my_variable);
To publish all variables registered to a topic:
PUBLISH_STATISTICS("/statistics_topic");
And to unregister:
UNREGISTER_VARIABLE("/statistics_topic", "my_variable_name");
Data transmission and storing
Data is sent via ROS topics of type pal_statistics_msgs/Statistics which basically is an array of names/doubles.
Data can be stored as rosbags, like all ros topics. It’s also designed to be integrated with Graphite, which is:
Graphite is an enterprise-ready monitoring tool that runs equally well on cheap hardware or Cloud infrastructure. Teams use Graphite to track the performance of their websites, applications, business services, and networked servers. It marked the start of a new generation of monitoring tools, making it easier than ever to store, retrieve, share, and visualize time-series data.
Data visualization
Data can be visualized with any tools that display ROS topics, but we recommend PlotJuggler for viewing high resolution live data, or data in bags.
Or you can view historic data via Grafana
Tutorials
The tutorials are hosted on the ROS wiki
Acknowledgements
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.