
No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | piper_isaac_sim |
| Checkout URI | https://github.com/agilexrobotics/piper_isaac_sim.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-11-22 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| piper_camera_moveit_config | 0.3.0 |
| piper_description | 0.1.0 |
README
Piper_isaac_sim
测试系统配置:ubuntu22.04+4060显卡
1、配置系统环境
1)安装显卡驱动
2)下载NVIDIA Omniverse
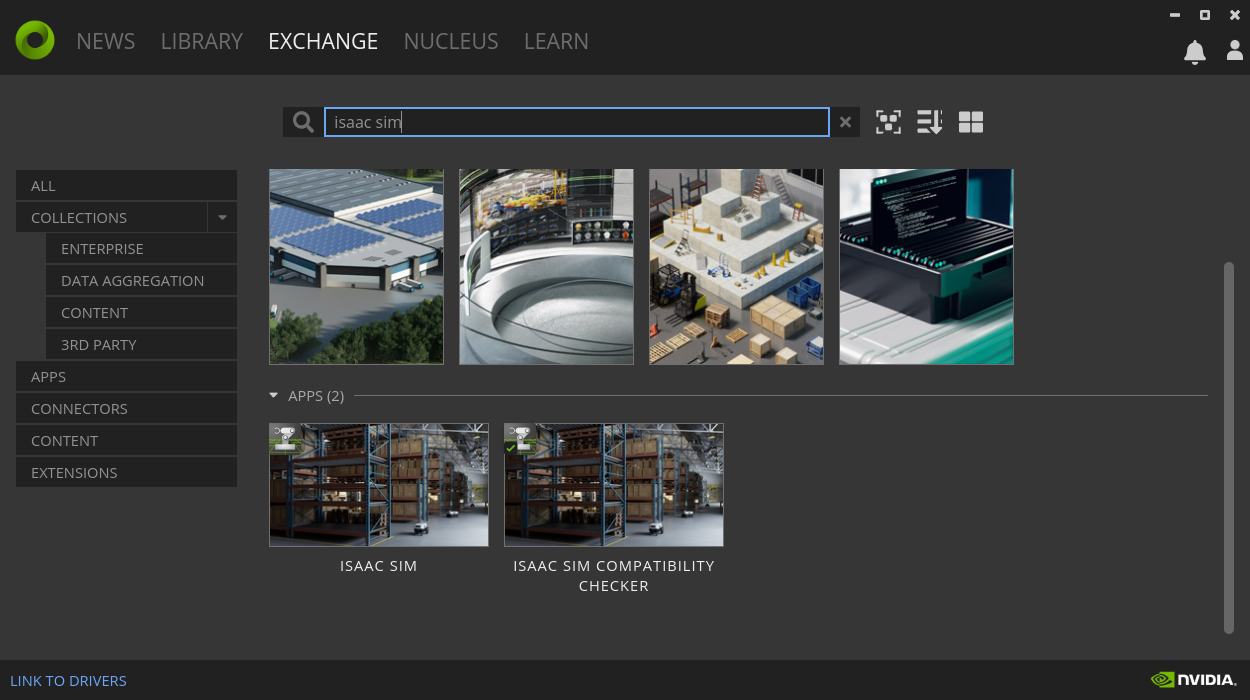
3)下载isaac sim
安装isaac sim之前,可以使用ISAAC SIM COMPATIBILITY CHECKER检查一下,电脑配置是否满足要求
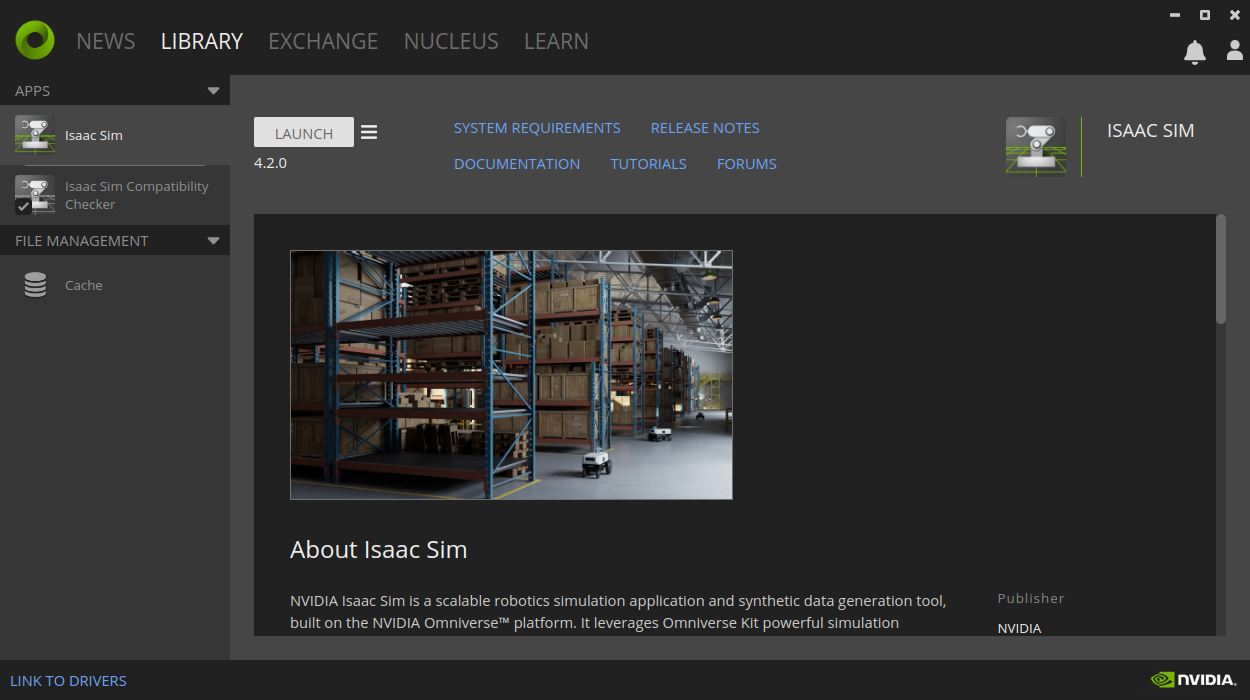
在Omniverse里面下载isaac sim
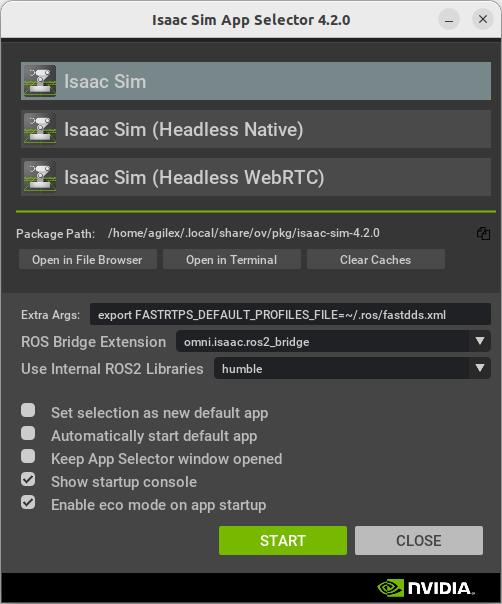
下载完成之后可以启动isaac sim
4)配置ROS2
5)配置moveit2
安装完Moveit2之后,需要安装一些依赖:
sudo apt-get install ros-humble-control* ros-humble-joint-trajectory-controller ros-humble-joint-state-* ros-humble-gripper-controllers ros-humble-trajectory-msgs
isaac sim和moveit通讯的功能包:
sudo apt install ros-humble-topic-based-ros2-control
2、使用方法
1)创建名为agilex_ws/src的文件夹
mkdir -p agilex_ws/src
2)下载代码
进入agilex_ws/src文件夹
cd agilex_ws/src
下载代码
https://github.com/agilexrobotics/piper_isaac_sim.git
3)编译代码
进入agilex_ws文件夹
cd agilex_ws
编译
colcon build
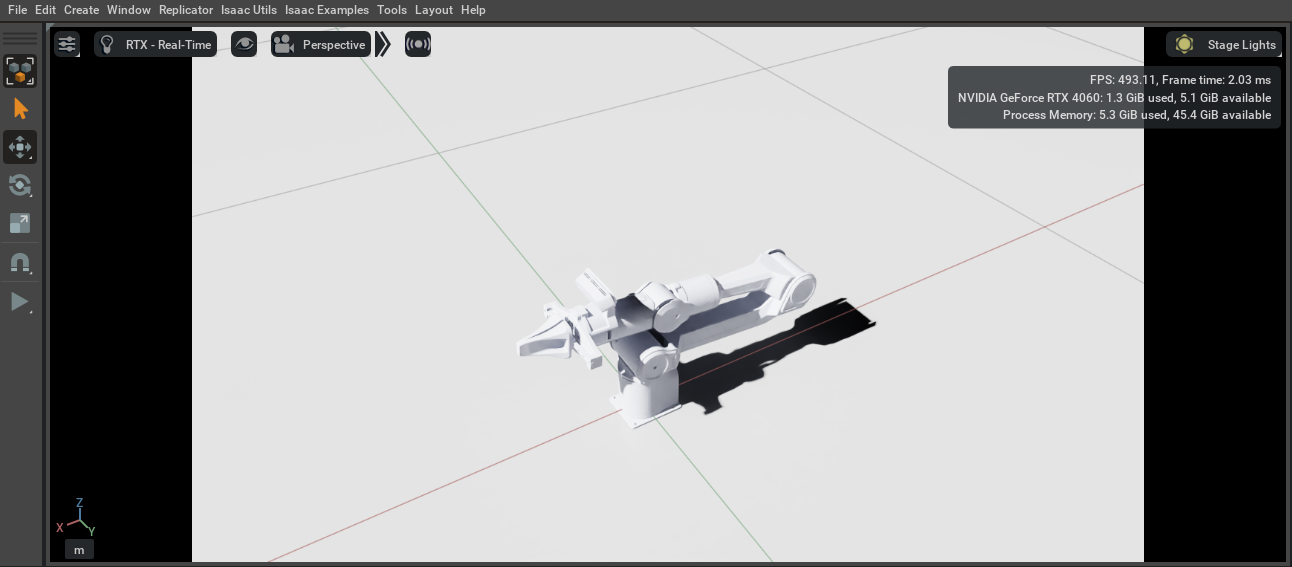
4)启动isaac sim,导入USD
打开isacc sim之后,在content中找到存放USD的路径,双击打开
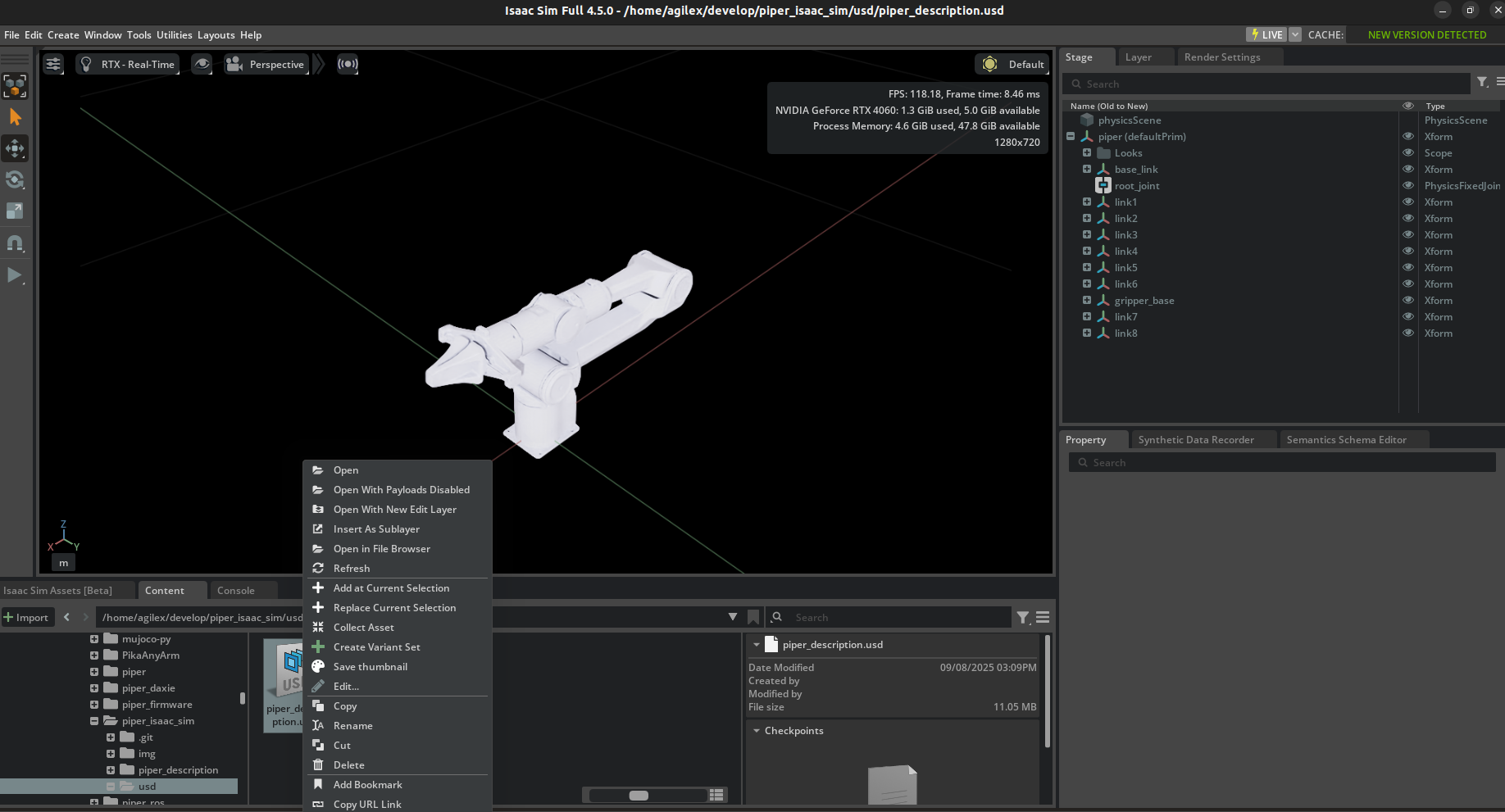
成功导入后,点击三角按钮开始仿真
5)启动moveit
进入agilex_ws文件夹
cd agilex_ws
声明环境变量
source install/setup.bash
启动moveit
ros2 launch piper_camera_moveit_config demo.launch.py
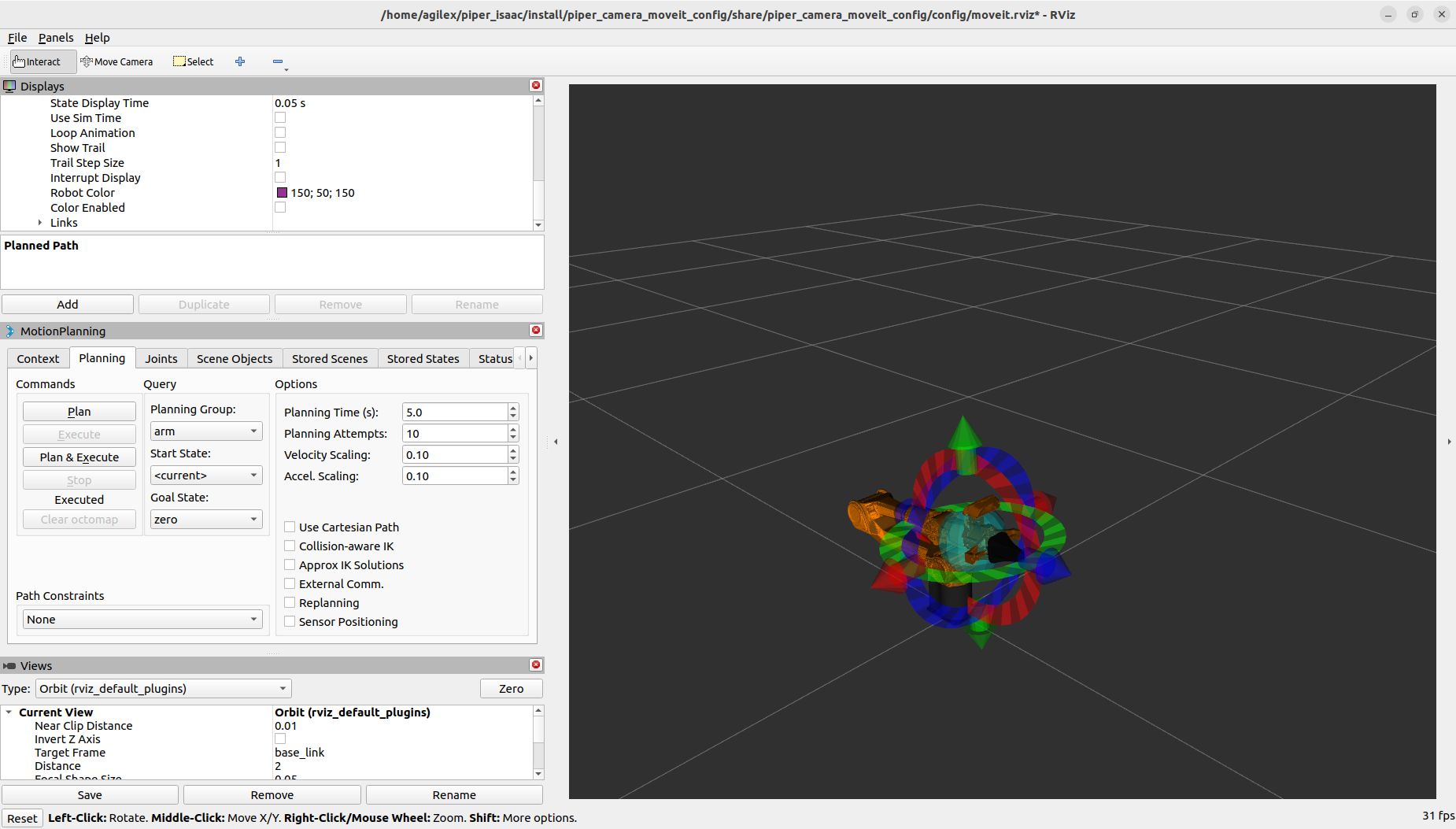
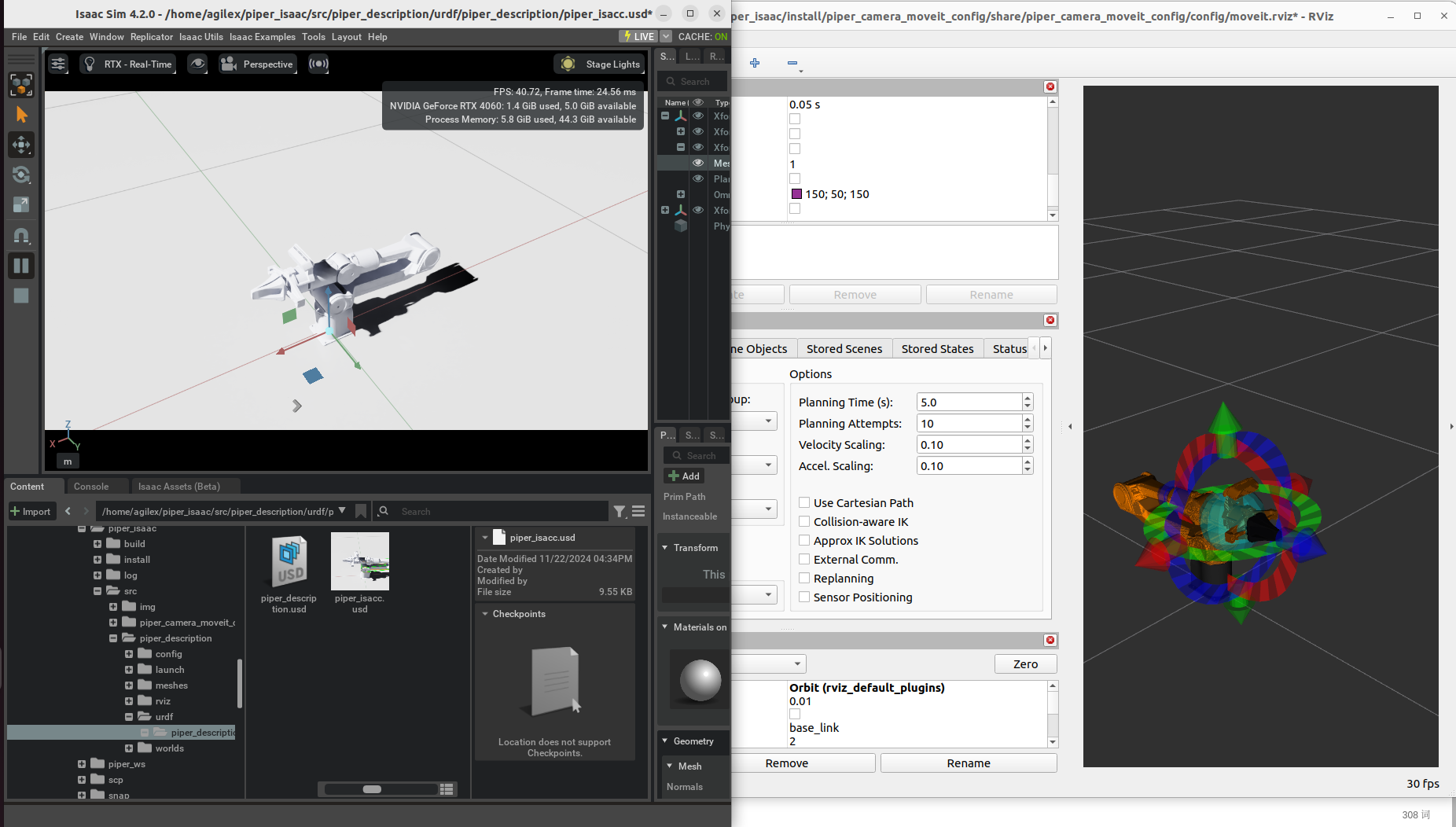
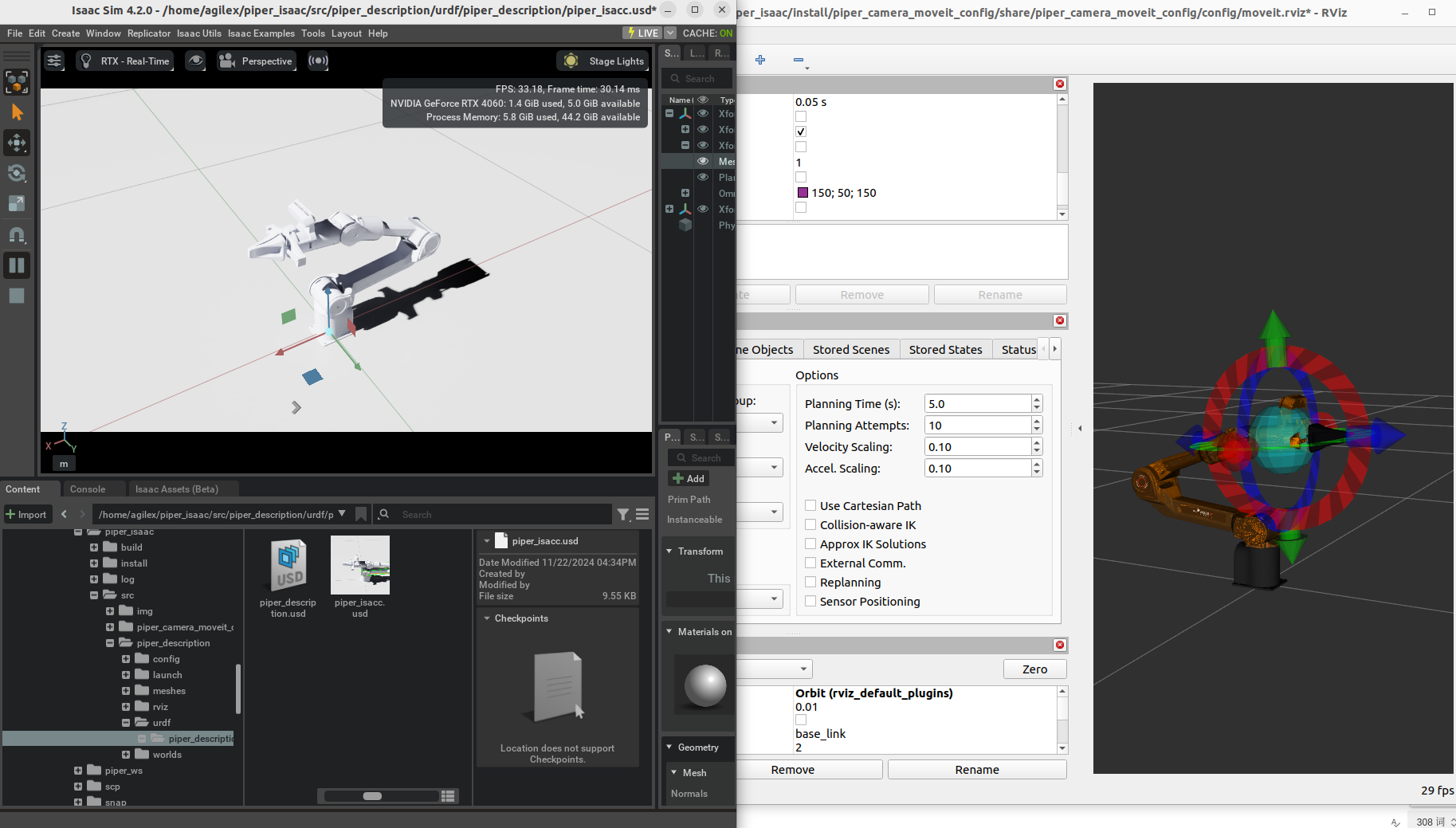
6)联合仿真
在moveit中,拖动悬浮球控制机械臂运动
CONTRIBUTING
No CONTRIBUTING.md found.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.