|
pouco2000 repositorymonitor ros arduino-library pouco2000_ros_demo pouco2000_ros_gazebo pouco2000_ros pouco2000_ros_msgs pouco2000_ros_tools |
|
|
Repository Summary
| Description | Often during a development, a robot depend on a lot of parameters. Debug a robot with a lot of parameters may be not user friendly because we are limited by using only one mouse and one keyboard. This solution allows to debug your robot easily in using your two hands. The project can be implemented on any ROS robot. |
| Checkout URI | https://github.com/PoussPouss/pouco2000.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-03-10 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | monitor ros arduino-library |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| pouco2000_ros_demo | 0.0.0 |
| pouco2000_ros_gazebo | 0.0.0 |
| pouco2000_ros | 0.0.0 |
| pouco2000_ros_msgs | 0.0.0 |
| pouco2000_ros_tools | 0.0.0 |
README
Pouco2000
status: :warning: in development
related commit: a629a58
Table Of Contents
ROS Packages
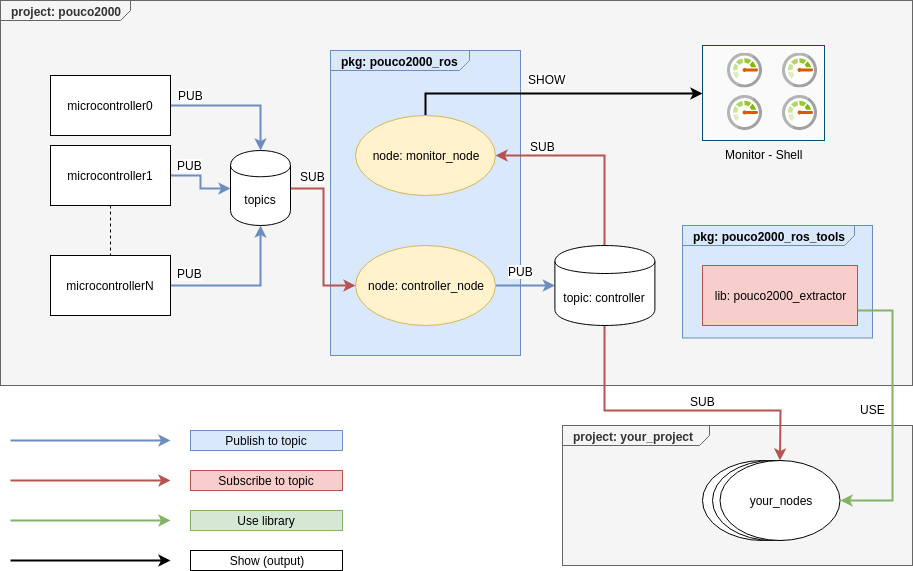
Architecture
Diagram explaining the principal workflow.
ROS packages are splitted into 2 meta-packages:
-
pouco2000_src: set of packages driving the controller
- pouco2000_ros
- pouco2000_msgs
- pouco2000_tools
-
pouco2000_examples: set of packages explaining how to use the project
- pouco2000_popup
- pouco2000_gazebo
- pouco2000_demo
pkg: pouco2000_ros
the principale package is pouco2000_ros, this package receives data from electronic part, and regroups these messages into one msg.
The package is generally based on 2 librairies:
- pouco2000, principal library, grouping Controller class definition.
- pouco2000_debug, allowing to develope easily the ros part. I decided to let this part in the release version, allowing to user to develope efficacely dependent packages.
2 others libaries have been developed.
- pouco2000_introspection, filter data from controller msg and publish data
- pouco2000_monitor, grouping methods and classes allowing to create a monitor.
nodes
- controller_node:
- brief: subscribe topics from micocontrollers and publish own message with all data
- parameters:
- (private) rate: the pubication rate. By default the controller_node publish a message once a new data from microntroller has been received
- monitor_node:
- brief: display the content send by the controller_node
- parameters:
- (private) rate: the spin rate. By default the rate is 10Hz
- (private) auto_refresh: if false the viewer is refreshed only a new different msg.
pkg: pouco2000_ros_tools
This package exposes a cpp library, easily the developement of nodes using this project.
Setup packages
Place its
ROS packages need to placed inside your ROS workspace. It’s possible to place its, by a symbolic link.
cd {ros/work/space/src/path/}
USER$ ln -s {pouco2000/ros/path} pouco2000
(It’s also possible to copy and paste the folder inside your workspace)
Compile its
Once moved or linked, the package need to be compiled. It’s possbile to use catkin_make or catkin build.
** go inside in your working space (at the root level) **
USER$ catkin_make
or
** go inside in your working space (at any level) **
USER$ catkin build
Use packages
The controller_node publishes the current state of the table. If you want to get the current state you need to create a subscriber to this topic. By default this topic is: controller
Start the controller
Please update the launch release inside pouco2000_ros package (verify serial port used).
USER$ roslaunch pouco2000_ros release.launch
Start the monitor (opt.)
The monitor displays (in the current shell) the current state of the board seen from ROS.
The node is start by this way:
USER$ roslaunch pouco2000_ros monitor.launch
(launch the node in the good namespace)
or by this way (remapping):
USER$ rosrun pouco2000_ros monitor_node controller:=/namespace/controller
msg:Controller
The project is essentially based on a principal msg: pouco2000::Controller
Header header
Buttons buttons
SwitchsOnOff switchs_on_off
SwitchsMode switchs_mode
Potentiometers potentiometers_circle
Potentiometers potentiometers_slider
Each part expect header is an array of data.
The message can be see like this:
Header header
[bool,bool,...] buttons
[bool,bool,...] switchs_on_off
[uint8,uint8,...] switchs_mode
[float32,float32,...] potentiometers_circle
[float32,float32,...] potentiometers_slider
lib: pouco2000_extractor
The package pouco2000_tools includes pouco2000_extractor. This library provides class and methods allowing to extract data easily from controller msg.
For each field a class has been developed. For each extractor a position in the field array need to be given.
Each extractor owns no less than 2 methods:
/**
* @brief extract the value from msg only if the data has been updated
*
* @param msg controller msg
* @param result result of the extraction
* @return true trig an update
* @return false update hasn't been done
*/
bool extract_only_change(const pouco2000_ros_msgs::Controller::ConstPtr& msg, T_data& result);
/**
* @brief extract the value if it's possible to do
*
* @param msg controller msg
* @param result result of the extraction
* @return true extraction is possible
* @return false extraction isn't possible
*/
bool extract(const pouco2000_ros_msgs::Controller::ConstPtr& msg, T_data& result);
| Field | Class | Additional Method | Goal |
|---|---|---|---|
| Buttons | ExtractorButton | is_push | return bool if the button is pushed |
| SwitchOnOff | ExtractorSwitchOnOff | is_on | return bool if the switch is on |
| SwitchMode | ExtractorSwitchMode | is_mode | return bool if the switch is on the mode given |
| PotentiometerCircle | ExtractorPotentiometerCircle | None | None |
| PotentiometerSlider | ExtractorPotentiometerSlider | None | None |
Show example demo_02_extractor inside pouco2000_demo package.
Show the documentation inside the pouco2000_demo_tools package (once compiled).
:exclamation: If you want to use this library inside your package, your package need to depend on: pouco2000_ros_tools (CMakeLists and package.xml)
Each extractor can be instanciated mannuelly or you can instanciate a HandleExtractors (please refer to the example: demo_03_handle_extractors)
Documention
a rosdoc command has been added to the CMakeLists, so when you will compile the package, a documentation folder will be added to package including a doxygen documentation.
Arduino Library
An arduino library has been developed, allowing to create easily a code.
Setup library
Place it
Like ROS package, the library need to be placed at the good place. It’s possible to create a symbolic link.
cd {Arduino/libraries/path}
USER$ ln -s {pouco2000/arduino/lib/pouco2000_ard/path} pouco2000_ard
Place ros_lib
The project uses ROSSERIAL package. Once the pouco2000_ros_msgs has been compiled, the header’s msgs need to placed into arduino libraries.
The lib_ros generation can be done, by this command:
USER$ rosrun rosserial_arduino make_libraries.py {arduino/path/libraires}
For more information about this package: http://wiki.ros.org/rosserial
Use library
Principal concepts
For each field (buttons, switchs on off…), a handle object need to be created.
/**
* @brief Construct a new Handle object
*
* @param topic topic where the message will be published
* @param connections array of connections
* @param n_connections number of connections
* @param is_digital if the field use digital or analog port
*/
Handle<T_field,T_data,T_msg>::Handle(const char* topic,int* connections,int n_connections,bool is_digital)
In the setup method, the handle need to call a setup method.
/**
* @brief setup the current handle, declare the publisher to the NodeHandle and
* set the pinMode of each pin to INPUT
* @param nh current nodehandle
*/
void setup(ros::NodeHandle& nh);
In the loop method, the handle need to call a update method.
/**
* @brief update msg used by the handle in checking state of pin
*
*/
void update();
In the libraray, typical typedefs are already defined.
typedef Handle<Switch,pouco2000_ros::SwitchsOnOff::_data_type,pouco2000_ros::SwitchsOnOff> HandleSwitchsOnOff;
typedef Handle<SwitchMode,pouco2000_ros::SwitchsMode::_data_type,pouco2000_ros::SwitchsMode> HandleSwitchsMode;
typedef Handle<Button,pouco2000_ros::Buttons::_data_type,pouco2000_ros::Buttons> HandleButtons;
typedef Handle<Potentiometer,pouco2000_ros::Potentiometers::_data_type,pouco2000_ros::Potentiometers> HandlePotentiometers;
So, for each field you need:
- varibales definition (outside of setup and loop method)
- create a pin array, defining pin used by this field
- create a handle for this field
- inside setup method
- call the setup of the handle with the current nodehandle
- inside loop method:
- call the update method of the handle
Examples
Some examples has been developed and added to the librarie. Theses examples can be loaded from the arduino IDE (file -> Examples -> pouco2000_ard).
Warning
The library has been developed and tested on the following boards:
- arduino uno
- arduino nano
It’s possible to use several microcontrollers, but all elements of a field neet to be driven by the same microcontroller.
Configurations
Several configurations are possible with Pouco2000:
Remote
You can plug all microcontrollers to a raspberry or a computer (ROS SLAVE) and connect this computer to your ROS MASTER. By this way it’s possible to communicate with your robot via ethernet (or wifi).
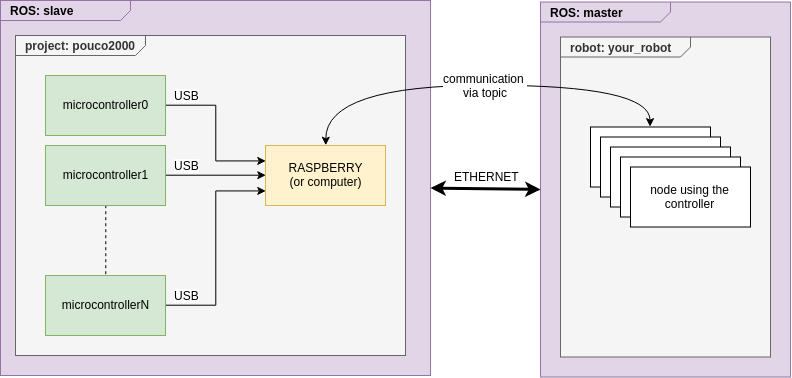
For more information about ROS slave/master: http://wiki.ros.org/ROS/Tutorials/MultipleMachines
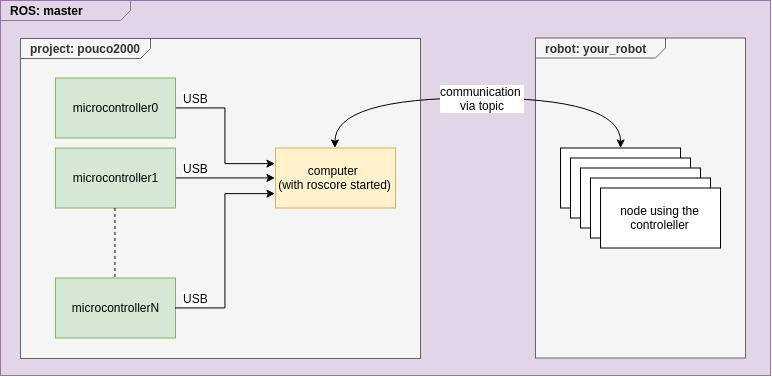
Local
An another way, it’s to connect directly microcontroller to your computer running the ROS MASTER.