
|
psd24_simulator repositorydocker ros2 4wd gazebo-simulator jazzy-robot ros2-control ubuntu2404lts psd_controller custom_teleop psd_gazebo_worlds custom_msgs psd_perception psd_slam psd_vehicle_bringup psd_vehicle_description |
|
|
Repository Summary
| Description | 4WD vehicle simulator based on Gazebo Harmonic, ROS2 Jazzy Jalisco and Ubuntu 24.04 Noble |
| Checkout URI | https://github.com/rimaturus/psd24_simulator.git |
| VCS Type | git |
| VCS Version | working_jazzy_gz |
| Last Updated | 2025-04-07 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | docker ros2 4wd gazebo-simulator jazzy-robot ros2-control ubuntu2404lts |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| psd_controller | 0.0.0 |
| custom_teleop | 0.0.0 |
| psd_gazebo_worlds | 0.0.0 |
| custom_msgs | 0.0.0 |
| psd_perception | 0.0.0 |
| psd_slam | 0.0.0 |
| psd_vehicle_bringup | 0.0.0 |
| psd_vehicle_description | 0.0.0 |
README
PSD Simulator
ROS2 Jazzy Jalisco + Gazebo Harmonic + Ubuntu 24.04 Noble
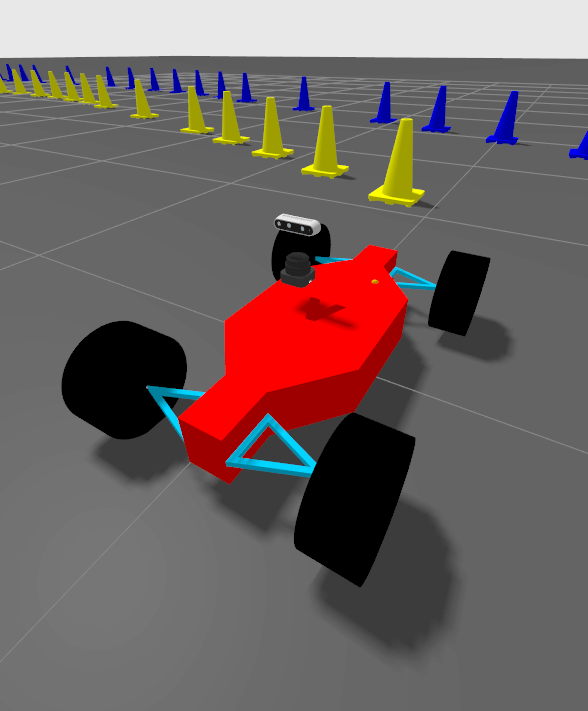
This project aims to develop a high-fidelity digital twin of a 4WD vehicle, where each wheel’s torque is individually controlled and steering is achieved through a hinge-based system. This innovative approach eliminates reliance on standard plugins, allowing the vehicle’s movement and trajectory to be determined solely by its interaction with the terrain.
To demonstrate the capabilities of this digital twin, I’ve created a simple test track environment, marked by cones, where the vehicle’s performance can be evaluated under various conditions.
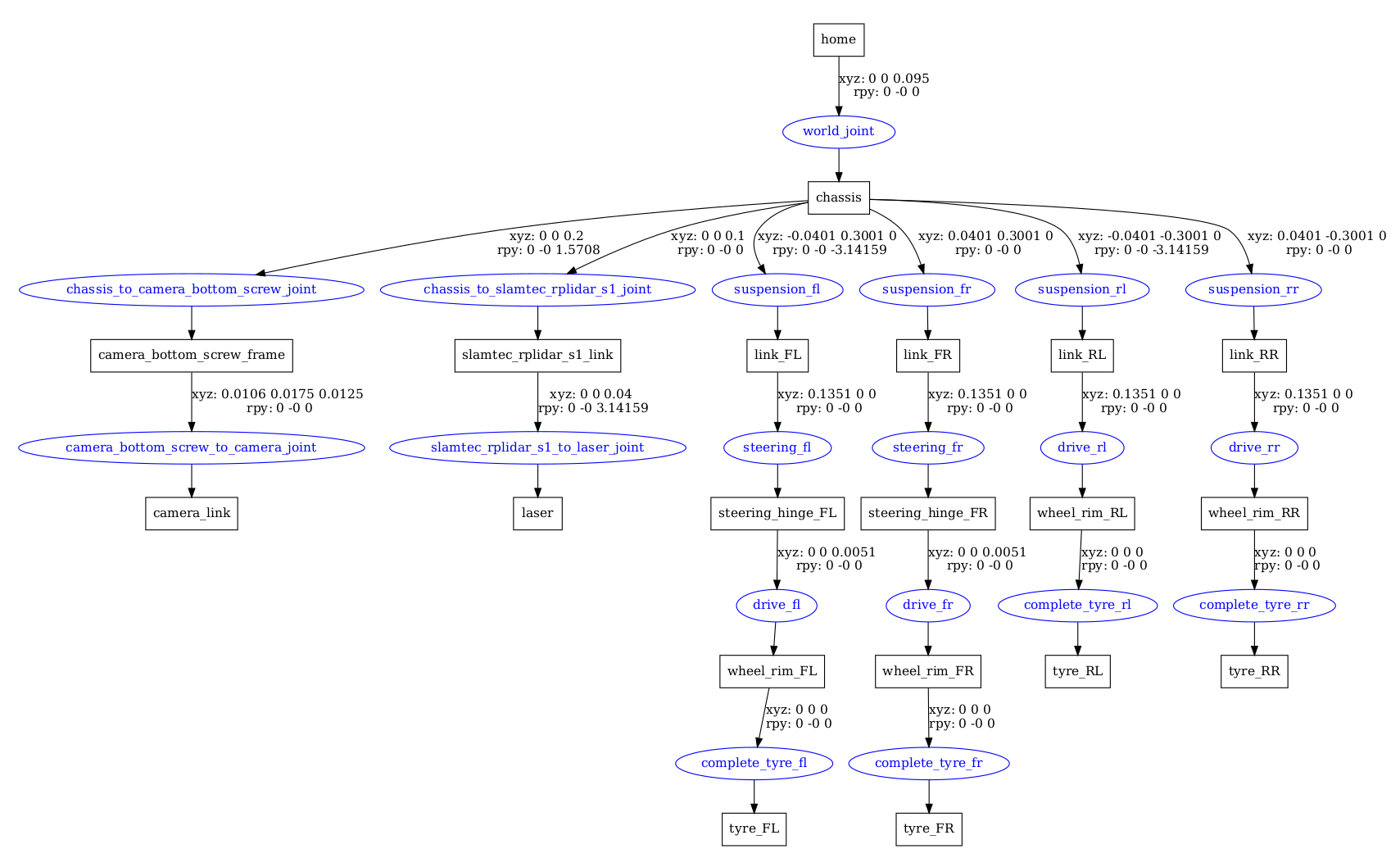
Vehicle system:
How to download [IMPORTANT]:
Since it use a submodules that contain the models of the camera and lidar, clone this repo using git clone --recurse-submodules <this-repo-url>
How to build the image and start the container
1) Go inside the cloned folder
2) Create an image from the Dockerfile: docker build -t psd_noble_jazzy .
3) Run the container: docker run -it --gpus all --user ubuntu --network=host --ipc=host -v $PWD/psd_ws:/home/ubuntu/psd_ws -v /tmp/.X11-unix:/tmp/.X11-unix:rw --env=DISPLAY -v /dev:/dev --device-cgroup-rule="c *:* rmw" --name psd_container psd_noble_jazzy
4) Achtung! Once inside, only for the first time go to deps/ folder and launch bash first_launch_script.sh: this will setup everything for you and configure all the dependencies.
5) CTRL + D to exit the container`
How to use it:
At every pc reboot you need to do docker start psd_container
After that you can access the container with docker exec -it psd_container /bin/bash
First run of the container:
To be sure that everything is setup well, check the README in the deps/ folder