
|
reinforcement_learning_playground repositoryreinforcement-learning model-based-control ros2 reinforcement-learning-environments ros2-rolling |
|
|
|
|
reinforcement_learning_playground repositoryreinforcement-learning model-based-control ros2 reinforcement-learning-environments ros2-rolling |
|
|
|
|
reinforcement_learning_playground repositoryreinforcement-learning model-based-control ros2 reinforcement-learning-environments ros2-rolling |
|
|
|
|
reinforcement_learning_playground repositoryreinforcement-learning model-based-control ros2 reinforcement-learning-environments ros2-rolling |
|
|
|
|
reinforcement_learning_playground repositoryreinforcement-learning model-based-control ros2 reinforcement-learning-environments ros2-rolling cart_pole_bringup cart_pole_model_based_controller cart_pole_observation cart_pole_observation_interface cart_pole_reinforcement_learning genesis_simulations simulation_control |
|
|
Repository Summary
| Description | ROS 2 Reinforcement learning playground |
| Checkout URI | https://github.com/wiktor-99/reinforcement_learning_playground.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-05-06 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | reinforcement-learning model-based-control ros2 reinforcement-learning-environments ros2-rolling |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| cart_pole_bringup | 1.0.0 |
| cart_pole_model_based_controller | 1.0.0 |
| cart_pole_observation | 1.0.0 |
| cart_pole_observation_interface | 1.0.0 |
| cart_pole_reinforcement_learning | 1.0.0 |
| genesis_simulations | 1.0.0 |
| simulation_control | 1.0.0 |
README
Reinforcement learning playground
Currently repository allows to play with cart pole model.
Cart pole simulation
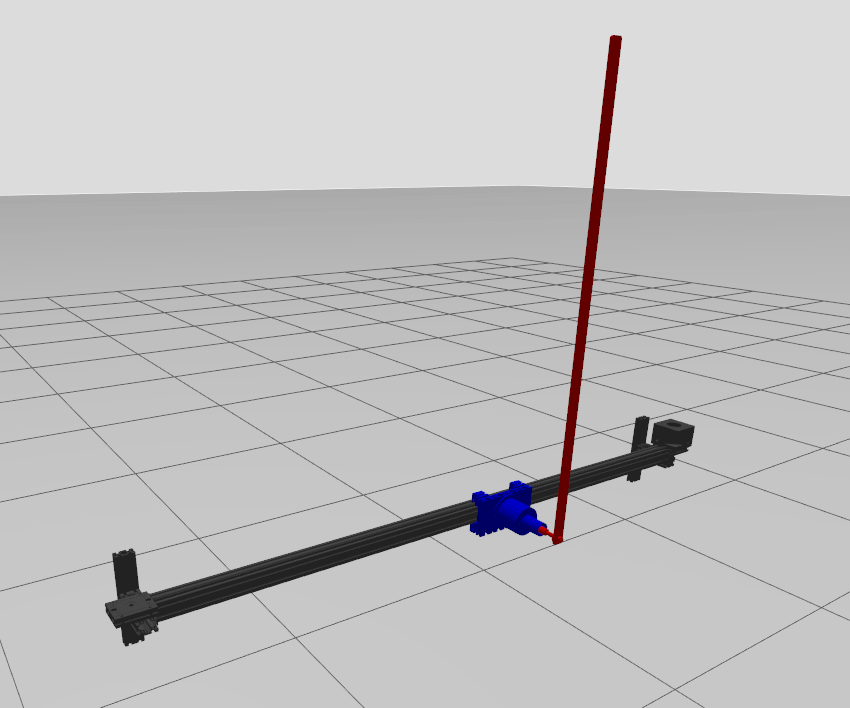
Model of the cart pole
The model of the cart pole was initially created and analyzed in publication:
-
K. Arent, M. Szulc, “Experimental stand with a pendulum on a cart: construction, modelling, identification, model based control and deployment”
@chapter {ARENT2018 title = "Experimental stand with a pendulum on a cart: construction, modelling, identification, model based control and deployment" authors = "KRZYSZTOF ARENT and Mateusz Szulc" booktitle = "Postępy robotyki" year = "2018" pages = "365-376" }
The cart pole is located in The Laboratory of Robotics on Wrocaław University of Science and Technology.
Run simulation
Open folder in a devcontainer. Then type
colcon build --symlink-install
source install/setup.bash
ros2 launch cart_pole_bringup cart_pole.launch.py
Linear approximation in an unstable equilibrium point
A model of an inverted pendulum on a cart and controller are derived in the cart_pole_system.ipynb.
The model was applied to control the cart pole in the script linear_approximation_control_node.py.
source install/setup.bash
ros2 run cart_pole_model_based_controller linear_approximation_control_node
Reinforcement learning nodes
Repository currently contains three reinforcement learning policies:
- Basic policy
- Neural network policy
- Deep q learning policy
All implementations are based on the implementations presented in the Hands-On Machine Learning with Scikit-Learn, Keras, and Tensorflow: Concepts, Tools, and Techniques to Build Intelligent
Launching
To run simulations use command given above and in other terminal use one of following command:
source install/setup.bash
ros2 run cart_pole_reinforcement_learning cart_pole_basic_policy_node
or
source install/setup.bash
ros2 run cart_pole_reinforcement_learning cart_pole_neural_network_policy
or
source install/setup.bash
ros2 run cart_pole_reinforcement_learning cart_pole_deep_q_learning_policy_node
DQN model works poorly for now.
Rolling branch uses cuda-image in the devcontainer, non cuda version is on the main branch.
CONTRIBUTING
|
|
reinforcement_learning_playground repositoryreinforcement-learning model-based-control ros2 reinforcement-learning-environments ros2-rolling |
|
|
|
|
reinforcement_learning_playground repositoryreinforcement-learning model-based-control ros2 reinforcement-learning-environments ros2-rolling |
|
|
|
|
reinforcement_learning_playground repositoryreinforcement-learning model-based-control ros2 reinforcement-learning-environments ros2-rolling |
|
|
|
|
reinforcement_learning_playground repositoryreinforcement-learning model-based-control ros2 reinforcement-learning-environments ros2-rolling |
|
|