
Repository Summary
| Description | ROS 2 RMW implementation for iceoryx2 |
| Checkout URI | https://github.com/ekxide/rmw_iceoryx2.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-28 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| rmw_iceoryx2_cxx | 0.1.0 |
| rmw_iceoryx2_cxx_demo_nodes | 0.1.0 |
| rmw_iceoryx2_cxx_test_msgs | 0.1.0 |
README
rmw_iceoryx2
Introduction
[!IMPORTANT] The implementation is still in an “alpha” stage. Not all functionality is implemented/stable so surprises are to be expected.
If encountering problems, please create an issue so we can converge to stability :).
ROS 2 rmw implementation for iceoryx2.
iceoryx2 is a shared memory IPC middleware written in Rust for improved memory
safety and easier safety certifiability. The implementation leverages the C++
bindings to the Rust core.
Feature Completeness
| Feature | Status |
|---|---|
| Node | :white_check_mark: |
| Guard Condition | :white_check_mark: |
| Event | :construction: |
| Publish-Subscribe | :white_check_mark: |
| Server-Client | :construction: |
| Message Serialization | :white_check_mark: |
| Waitset | :white_check_mark: |
| Graph | :construction: |
| QoS | :construction: |
| Logging | :white_check_mark: |
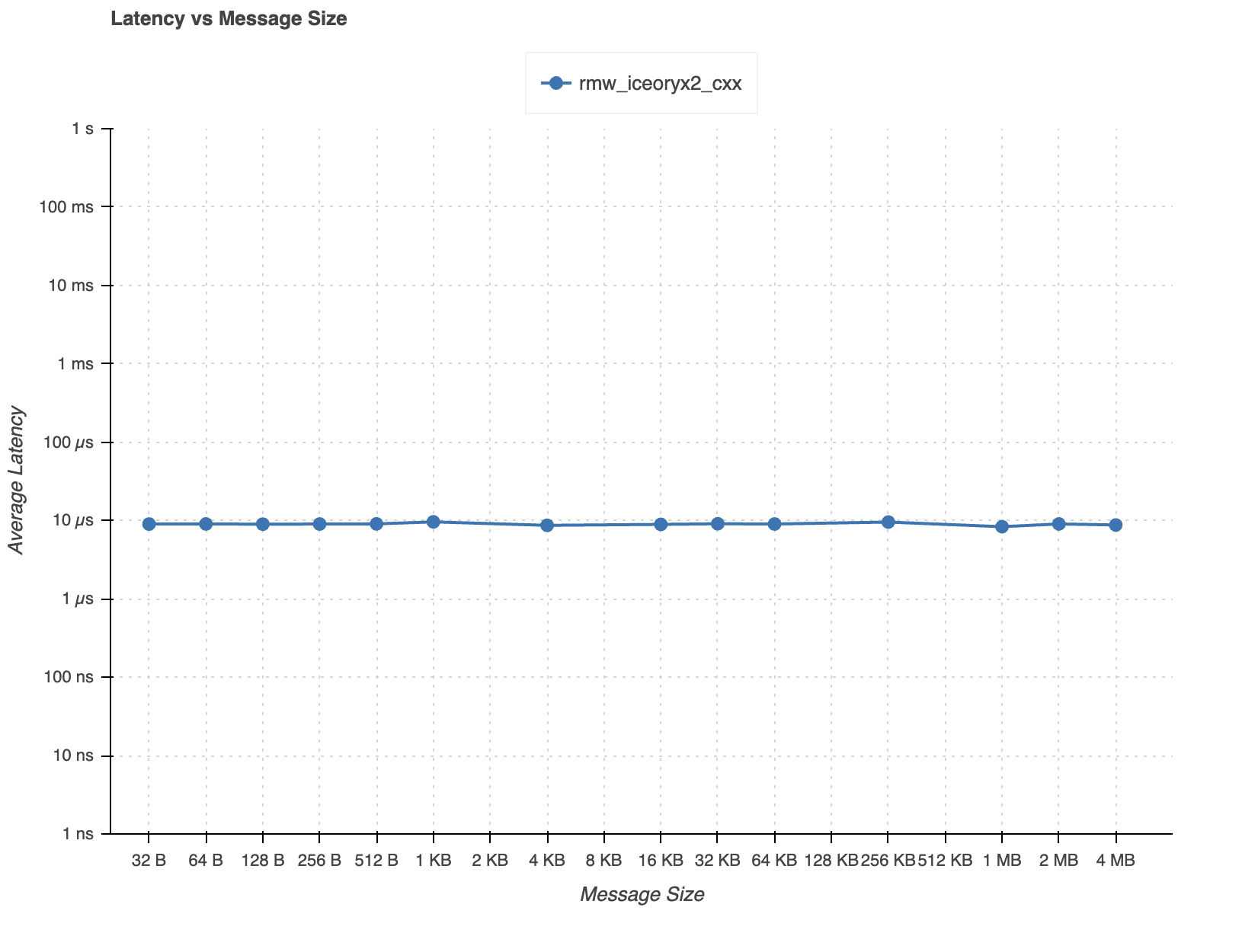
Performance
[!NOTE]
- The latency measurement can be reproduced with these instructions
- The measurements were taken on a Ryzen 3950X without a fine-tuned OS - lower latency could be expected on a fine-tuned target
- The
performance_testtool usesrmw_iceoryx2through the ROS 2 stack, which naturally introduces some overhead compared to pureiceoryx2- The minimal possible latency achievable with
iceoryx2is in the nanosecond range
Setup
-
Set up your environment for building ROS 2 from source
-
Create a ROS 2 workspace:
mkdir -p ~/workspace/src
- Clone the ROS 2 source:
vcs import --input https://raw.githubusercontent.com/ros2/ros2/rolling/ros2.repos ~/workspace/src
- Clone
iceoryxandiceoryx2source:
vcs import --force --input https://raw.githubusercontent.com/ekxide/rmw_iceoryx2/refs/heads/main/iceoryx.repos ~/workspace/src
- Clone
rmw_iceoryx2:- Either
mainor a specific version tag e.g.v0.1.0
- Either
git clone -b main https://github.com/ekxide/rmw_iceoryx2.git ~/workspace/src/rmw_iceoryx2/
- Build ROS 2 with
rmw_iceoryx2and the demo nodes:
cd ~/workspace/
RMW_IMPLEMENTATION=rmw_iceoryx2_cxx colcon build --symlink-install --packages-up-to ros2cli_common_extensions rmw_iceoryx2_cxx rmw_iceoryx2_cxx_demo_nodes
- Verify the build:
source ~/workspace/install/setup.zsh # or setup.bash
ros2 doctor --report
The middleware should be properly set:
RMW MIDDLEWARE
middleware name : rmw_iceoryx2_cxx
- Verify functionality by running the demo nodes:
- Terminal 1
source ~/workspace/install/setup.zsh # or setup.bash
ROS_DISABLE_LOANED_MESSAGES=0 ros2 run rmw_iceoryx2_cxx_demo_nodes listener_basic_types
1. Terminal 2
source ~/workspace/install/setup.zsh # or setup.bash
ROS_DISABLE_LOANED_MESSAGES=0 ros2 run rmw_iceoryx2_cxx_demo_nodes talker_basic_types
FAQ
Why another RMW implementation?
The goals of rmw_iceoryx2 are to:
- Enable ROS 2 applications to leverage the high performance shared-memory communication offered by
iceoryx2 - Enable interoperability between ROS 2 and
iceoryx2applications
Is rmw_iceoryx2 targeting ASIL certification?
ASIL certification of rmw_iceoryx2 is currently not a priority. Reason being that even if it were to be certified,
a certified flavour of ROS 2 would additionally be required to produce a fully certified application, which is
a large undertaking and not in scope for us.
The iceoryx2 implementation, however, is prepared for and targeting ASIL-D certification. With interoperability between iceoryx2
and rmw_iceoryx2, safety-critical components built on iceoryx2 (which may be certified up to ASIL-D) can communicate
with ROS 2 components which may not be certified, or certified at a lower rating (e.g. Quality Management (QM)), thus taking
advantage of the vast development ecosystem offered by ROS 2.
If you have a need for some level of certification for rmw_iceoryx2, feel free to get in touch.
We would be happy to discuss your use-case and explore the options together.
Is rmw_iceoryx2 capable of host-to-host communication?
In its current form, rmw_iceoryx2 only supports communication within a single host. However, iceoryx2 has so-called Gateways
and Tunnels on the roadmap which will support this use-case and should be available in the coming months.
A Gateway bridges between hosts using a host-to-host-capable middleware with a defined on-wire protocol, such as
zenoh, which runs in an isolated process and exchanges payloads via iceoryx2
shared-memory communication. This keeps network communication isolated from safety-critical software.
A Tunnel provides a more direct approach to host-to-host communication while maintaining the same process isolation model.
However, instead of using an intermediary middleware like zenoh, a Tunnel writes message payloads directly to the transport layer.
For example, a Tunnel using smoltcp would handle TCP/IP communication directly,
offering lower latency but requiring more careful handling of network communication details.
What is a self-contained message?
A message definition that does not contain any pointers or references to addresses in a process’s virtual
address space i.e. satisfy TriviallyCopyable named requirement.
Self-contained messages can be stored in shared memory without any serialization and subsequently read by any other process on the host system. Binaries should be compiled with the same compiler flags to ensure consistent memory representation.
How can I verify that iceoryx2 is being used by my ROS 2 application?
The iox2 CLI can be used to verify services are created for ROS 2 endpoints:
$ iox2 service list
[
PublishSubscribe("ros2://topics/basic_types"),
Event("ros2://topics/basic_types"),
PublishSubscribe("ros2://topics/parameter_events"),
Event("ros2://topics/parameter_events"),
]
Commercial Support
|
info@ekxide.io |
|
Maintainers
 »orecham« |
Contributors
It could be you!
This project is and will always remain fully open source. Looking to use
iceoryx2 in your ROS 2 application but finding the implementation lacking
in some way? Your contributions can help improve it more quickly, and we’ll
provide full support and guidance along the way.