
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control xarm_bringup |
|
|
Repository Summary
| Description | End-to-end robot control based on generative diffusion model |
| Checkout URI | https://github.com/marijagolubovic/robo_imitate.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-12-26 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | data-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| xarm_bringup | 0.0.0 |
README
Imitation learning with ROS 2
|  |
|  |
|:——————————————————————-:|:—————————————————-:|
|
|:——————————————————————-:|:—————————————————-:|
 |
 |
|---|---|
| Object picking with imitation learning | Object picking when pose of object is randomized |
</br>
[!IMPORTANT]
You need to have Docker installed. If you have an Nvidia GPU, you need to additionally follow this guide. Additionally, you need to istall Isaac-Sim If you want to use simulation.
Install docker
sudo apt install git make curl
curl -sSL https://get.docker.com | sh && sudo usermod -aG docker $USER
Installation
- Download our source code:
git clone https://github.com/MarijaGolubovic/robo_imitate.git && cd robo_imitate/docker
- Build docker container
make build-pc run exec
- Build ROS 2 packages
colcon build --symlink-install && source ./install/local_setup.bash
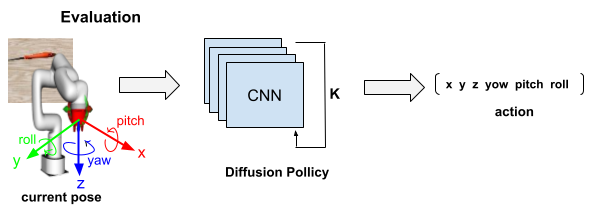
Model evaluation
[!NOTE] You can download pretrain model and aditional files from this link. Downloaded model and files you need to put inside folder
imitation/outputs/train. If folder don’t exist you need to create it.
- Run Isaac-Sim or Lite 6 robot arm
Inside docker container run:
- Run ROS 2 controler
ros2 launch xarm_bringup lite6_cartesian_launch.py rviz:=false sim:=true
If you want to vizualize robot set rviz on true. If you want to use real enviroment set sim on false.
- Open another terminal and run docker
make exec
- Run model inside docker
cd src/robo_imitate && ./imitation/pick_screwdriver --sim
If you run in real environment you need to remove --sim from command.
Model training
Inside robo_imitate directory run follow commands:
docker build --build-arg UID=$(id -u) -t imitation .
docker run -v $(pwd)/imitation/:/docker/app/imitation:Z --gpus all -it -e DATA_PATH=imitation/data/sim_env_data.parquet -e EPOCH=1000 imitation
[!TIP] If you want to run model training inside docker, run this command inside the folder
src/robo_imitate. Before that, you need to build the docker (see the Installation section for details).
python3 ./imitation/compute_stats --path imitation/data/sim_env_data.parquet && python3 ./imitation/train_script --path imitation/data/sim_env_data.parquet --epoch 1000
Acknowledgment
- This project is done in collaboration with @SpesRobotics.
- Thanks to LeRobot team for open sourcing LeRobot projects.
- Thanks to Cheng Chi, Zhenjia Xu and colleagues for open sourcing Diffusion policy
CONTRIBUTING
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|
|
|
robo_imitate repositorydata-generation robot-control imitation-learning robot-learning ros2 end-to-end-machine-learning diffusion-model robot-teleoperation isaac-sim ros2-control |
|
|