Repository Summary
| Checkout URI | https://github.com/riegllms/ros-riegl-vz.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-02-13 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| riconnect | 0.0.0 |
| riegl_vz | 1.5.0 |
| riegl_vz_interfaces | 0.0.0 |
| vzi_services | 0.0.0 |
README
ROS2 RIEGL VZ Package
This is a ROS2 package for the RIEGL VZ-i series devices. The package has been tested with:
- ROS2 Galactic Geochelone on Ubuntu Desktop 20.04 (Focal Fossa)
- ROS2 Humble Hawksbill on Ubuntu Desktop 22.04 (Jammy Jellyfish)
It provides a ROS interface with services and topics for scan data acquisition and scan position registration with a 3D laser scanner.
In detail, it provides the following functions:
-
Create a project on the laser scanner device
-
Configure the the laser scanner, including configuration of the scan pattern and the measurement program as well as the storage device for data logging on the device
- Start a scan data acquisition with
- optional scan registration
- optional reflector scan and search
- optional camera image capture
-
Publish the 3D point cloud in ROS
-
Publish voxel grid in ROS
-
Publish scan position resulting from scan registration, position is in scanner project coordinates or referenced to a global geographic coordinate system
-
Use of position and orientation data from a robot to improve the scan position registration algorithm.
-
Publish the device status (memory usage, error stack, …) and data acquisition progress information
- Publish positional data from the GNSS receiver in the laser scanner
ROS2 installation and setup:
Follow ROS2 installation instructions on https://docs.ros.org/en/galactic/Installation/Ubuntu-Development-Setup.html.
Configure the ROS2 environment according to https://docs.ros.org/en/galactic/Tutorials/Configuring-ROS2-Environment.html.
Create a new workspace (https://docs.ros.org/en/galactic/Tutorials/Workspace/Creating-A-Workspace.html) and clone repository into subdirectory ‘src’.
Install diagnostics updater package:
```sudo apt-get install ros-galactic-diagnostic-updater
**Install tf2 packages:**
```sudo apt-get install ros-galactic-tf2-tools ros-galactic-tf-transformations
Install python requirements:
Switch to ‘src’ subdirectory and install required python modules:
```python3 -m pip install -r requirements.txt
**Install python wheel with rdb library:**
Find an appropriate python wheel for the rdb library in the 'librdb/' subfolder of the repository
or send a request to RIEGL support: support@riegl.com.
The wheel includes a shared linux library must be appropriate for the target processor architecture.
Install the wheel, e.g. for x86_64:
```pip3 install riegl.rdb-2.4.0-cp34.cp35.cp36.cp37.cp38.cp39.cp310-none-linux_x86_64.whl
Note: At least version 2.4.0 is required for the ROS package to work.
Build package:
Switch to workspace root directory.
```colcon build
**Start 'riegl_vz' node:**
Open a second terminal. Execute '. install/setup.bash'.
Find .yaml files for configuration of node parameters in package install directory at: **install/riegl_vz/share/riegl_vz/config/**.
Copy **params_default.yaml** to **params.yaml** and edit parameter settings.
Launch 'riegl_vz' node with parameter settings from params.yaml:
```ros2 launch riegl_vz std_launch.py
Trigger a scan data acquisition:
Open another terminal. Execute ‘. install/setup.bash’.
Execute the scan trigger service:
```ros2 service call /scan std_srvs/srv/Trigger
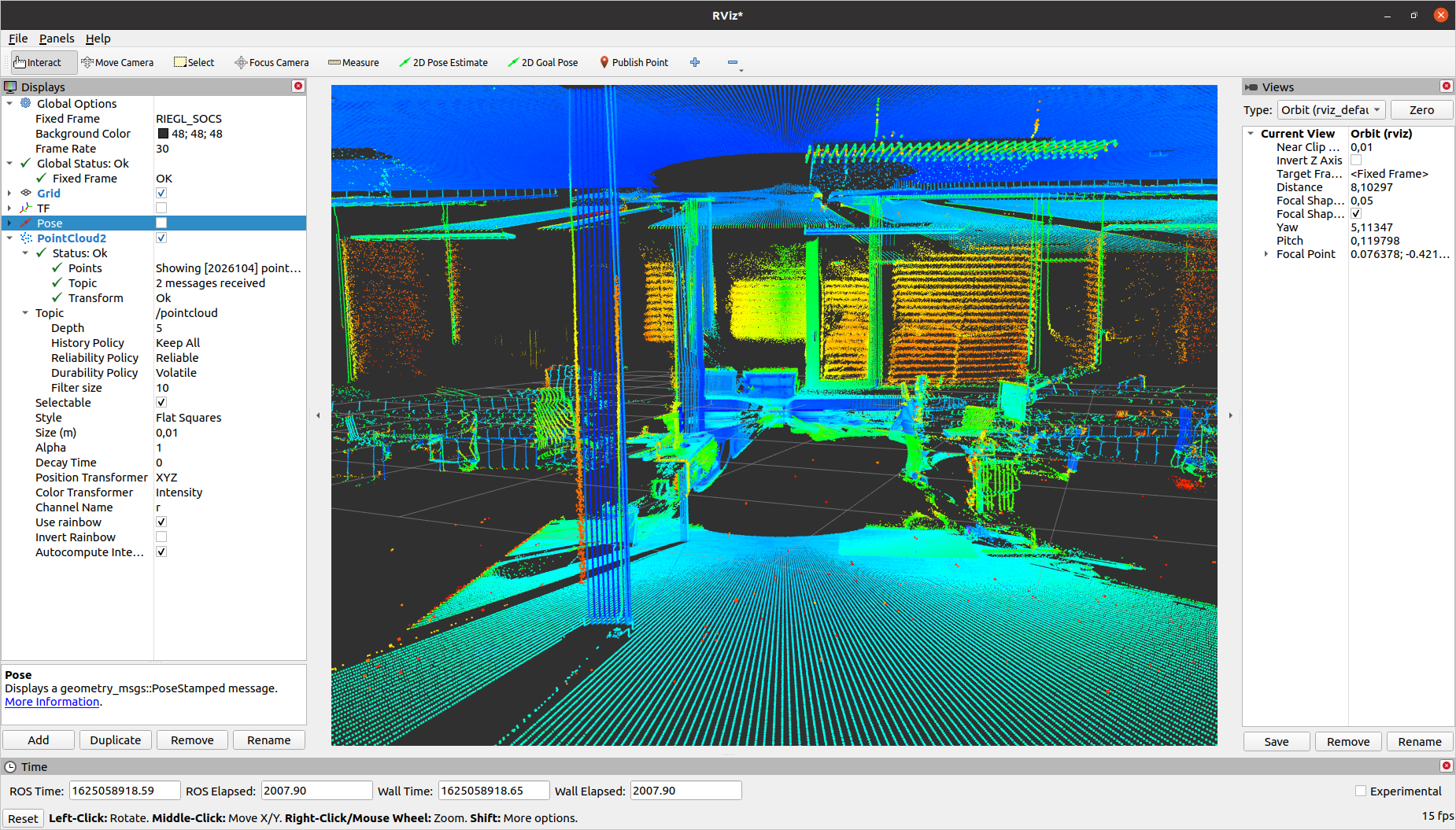
**Visualize scan data point cloud with rviz:**
Start 'rviz' tool:
```rviz2
Set ‘fixed-frame’ in ‘Global Options’ to ‘riegl_vz_socs’. Activate ‘PointCloud2’ plugin and bind it to riegl_vz/pointcloud topic:
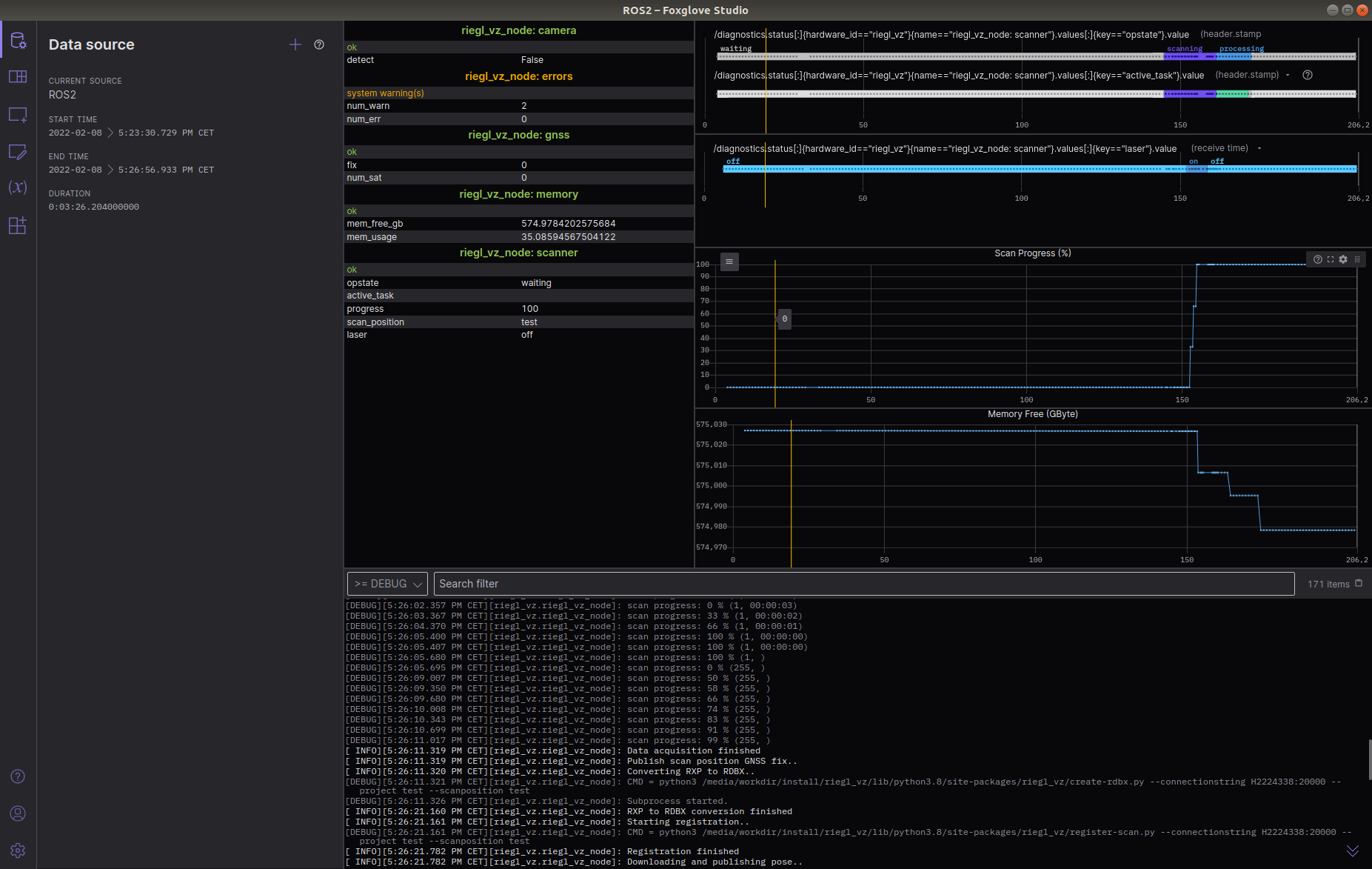
Monitor ‘riegl_vz’ node with foxglove-studio:
Install foxglove-studio from https://foxglove.dev.
Start ‘foxglove-studio’:
Import layout from foxglove/diagnostics.json..
and open a data source, e.g. open live connection.