
Repository Summary
| Description | |
| Checkout URI | https://github.com/vedantc2307/ros2-android-sensor-bridge.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-04-11 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| mobile_sensor | 0.0.0 |
README
Mobile Sensor Bridge for ROS2
This package provides a ROS2 node that streams sensor data directly from an Android smartphone including jpeg camera stream, position tracking, and bidirectional audio communication capabilities.
Overview
Traditionally, robotics prototypes rely on separate sensors that require calibration and integration. This package transforms an Android phone into a comprehensive sensor suite by directly publishing sensor data as ROS2 topics. The node is implemented using rclnodejs, enabling native ROS2 integration within a JavaScript environment.
Features
- Camera Stream: Publish mobile camera frames as ROS2 sensor_msgs/CompressedImage
- Native ROS2 Interface: Native ROS2 Integration
- Position Tracking: Stream WebXR spatial position data as geometry_msgs/Pose
- Speech Interface: Bidirectional audio communication with speech-to-text and text-to-speech capabilities
- Selectable Sensors: Enable/disable individual sensors as needed
Prerequisites
- ROS2 (tested with Humble)
- Node.js (v20 or newer recommended, tested with v22.14.0)
- npm (v8 or newer, tested with v10.9.2)
- Modern mobile phone if position tracking is needed WebXR support (for AR features)
- OpenSSL (for certificate generation)
Installation
- Clone the repository to your ROS2 workspace src directory:
cd <ros2_workspace>/src/
git clone https://github.com/VedantC2307/ros2-android-sensor-bridge.git mobile_sensor
- Install Node.js dependencies:
cd mobile_sensor
npm install
[!NOTE] The
npm installstep is critical and must be performed before building the package with colcon.
- Generate SSL certificates (needed for secure access):
cd <ros2_workspace>/src/mobile_sensor/src
chmod +x generate_ssl_cert.sh
./generate_ssl_cert.sh
- Build the ROS2 package:
cd <ros2_workspace>
colcon build --packages-select mobile_sensor
- Source the workspace:
source install/setup.bash
Usage
- Launch the mobile sensor node:
ros2 launch mobile_sensor mobile_sensors.launch.py
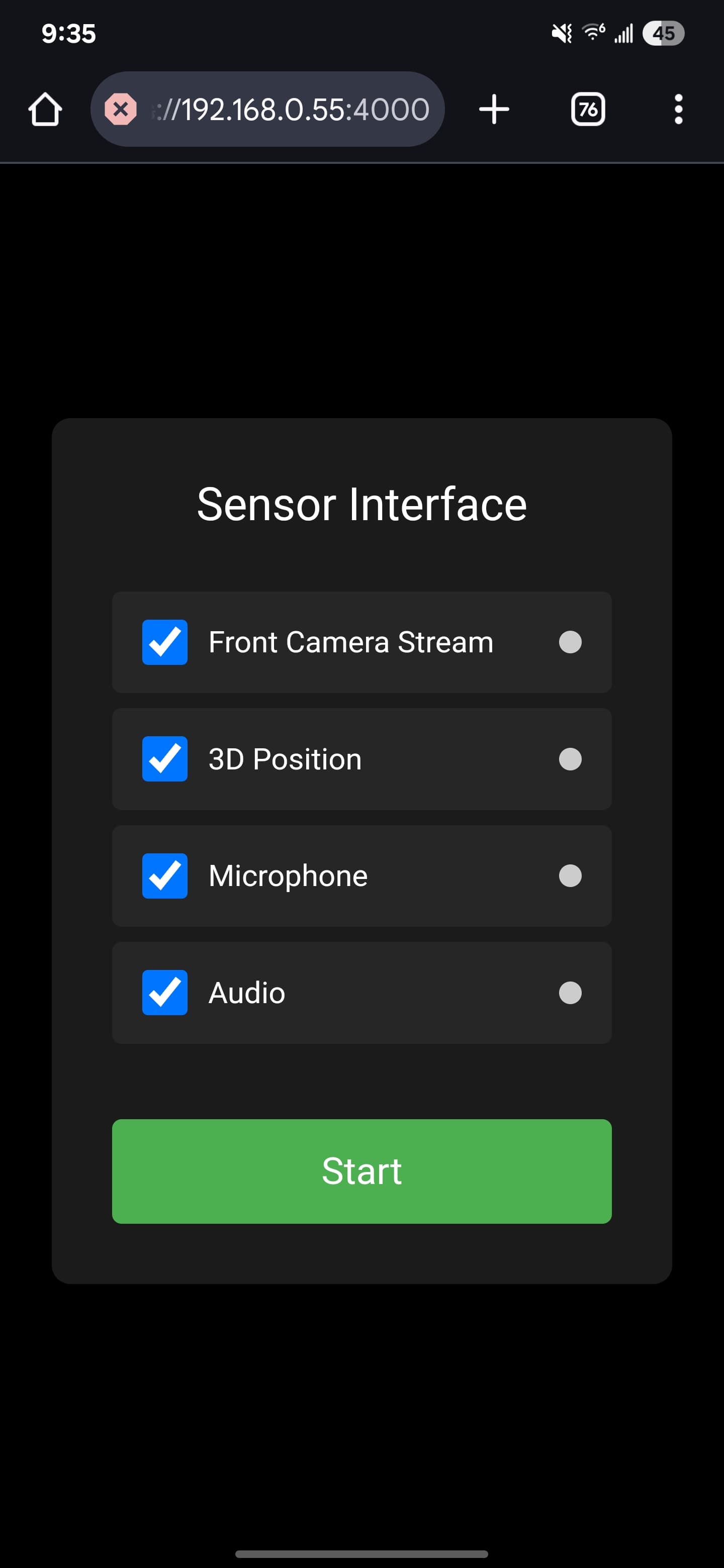
- Access the web interface on your mobile device:
- Open a browser on your mobile device and navigate to
https://<your_computer_ip>:4000 - Accept the security warnings about the self-signed certificate
- Grant permissions for camera, microphone, and AR features when prompted
- Select the sensors you want to use and click “Start”
- Open a browser on your mobile device and navigate to
ROS2 Topics
The package publishes to the following ROS2 topics:
-
/camera/image_raw/compressed: Camera images (sensor_msgs/CompressedImage) -
/camera/camera_info: Camera calibration data (sensor_msgs/CameraInfo) -
/mobile_sensor/pose: AR position data (geometry_msgs/Pose) -
/mobile_sensor/speech: Transcribed speech (std_msgs/String)
To send text-to-speech messages to the device, publish to:
-
/mobile_sensor/tts: Text to be spoken (std_msgs/String)
Contributing
Contributions are welcome! Please feel free to submit a Pull Request.