
Repository Summary
| Description | ROS 2 Custom Message Visualizer (CMV) is a package that can be used to generate rviz plugins for your custom messages. |
| Checkout URI | https://github.com/suchetanrs/ros2_cmv.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-05 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| custom_msg_visualizer | 1.0.0 |
| custom_msg_visualizer_example | 1.0.0 |
| custom_msg_visualizer_msgs | 1.0.0 |
README
ROS 2 - CMV (ROS 2 - Custom message visualizer) is a library that can be used to generate RViz plugins to visualize your custom messages.
The plugins can be generated either with a GUI interface provided or by simply calling a CMake macro in your CMakeLists.txt where you create your ROS message.
This works with the
``` ROS distro but using
```Jazzy
``` or
```Rolling
``` is recomended to support visualization for a larger group of message fields in your custom message. To see the fields that can be visualized in your custom message for your distro, please refer to [this page](SupportedTypes.md).
<br>**Please use the
```master
``` branch for all the three supported distros.**
<div align="center">
<img src="img/map_poses.gif" alt="Image 1" width="320"/>
<img src="img/robot_corridor.gif" alt="Image 2" width="320"/>
<img src="img/two_robots.gif" alt="Image 3" width="320"/>
</div>
# Building the package.
```bash
source /opt/ros/$ROS_DISTRO/setup.bash
cd <your_ws>/src
git clone https://github.com/suchetanrs/ros2_cmv
cd ..
colcon build --symlink-install
Installation through deb packages - Soon 😉
Usage
It might be better to try generating the rviz plugin for the custom message you want with the GUI first in order to see how much of your message is actually visualizable. Once you are happy with the generated package and the visualization, you can directly incorporate the macro within your
``` to update or generate the rviz plugin in case of changes in the message interface.
## Generating a plugin for your message directly in your CMakeLists.
```CMake
find_package(custom_msg_visualizer REQUIRED)
# Generate ros interfaces
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/MessageOne.msg"
"msg/MessageTwo.msg"
DEPENDENCIES ${dependencies}
)
# Generate custom rviz plugins.
# Will be skipped if the message is not supported for plugin generation.
generate_rviz_plugin(
"msg/MessageOne.msg"
"msg/MessageTwo.msg"
)
Adding the
generate_rviz_plugin
will create RViz plugins for your required messages. A full example to use the CMake macro can be found in this package.
If a message cannot be visualized, a warning message will be pop-up during your build process and the plugin generation for that message will be skipped.
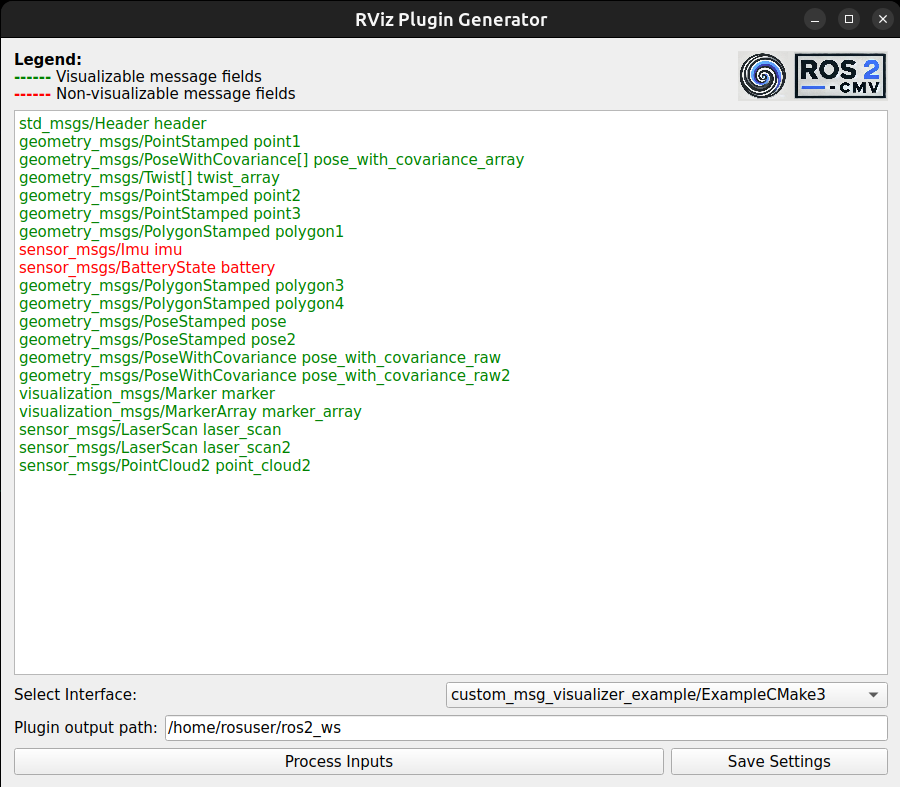
Generating a plugin with the GUI.
After building the package, you can run the GUI using
ros2 run custom_msg_visualizer plugin_generator_app
.
Input your message, the workspace path to generate the source files for the plugin and process the inputs.
Once the plugin is generated, build your workspace using
colcon build --symlink-install
.
If you source your workspace, launch RViz and try to add a new display, your message type should be visible.
The following rules must be followed for generating a valid plugin.
- Your custom message must have a valid header.
- There should be atleast one valid line (green in the GUI). A line is deemed valid if the message type on that line is visualizable.
- If you need a field to be visualizable, it needs to be a part of this list.
- Your message type should be of the format
<package_name>/<message_name>or in case of arrays,<package_name>/<message_name>[]. For example,Pose pose_fieldis not valid butgeometry_msgs/Pose pose_fieldis. This drawback will be fixed in a future release.
The RViz plugin
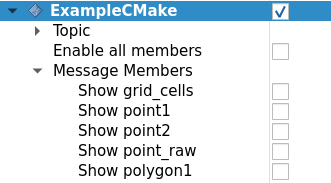
This is an example plugin generated for the
ExampleCMake.msg
in the
custom_msg_visualizer_example
package. The members visible in the plugin are the types that support visualization in the message.