
Repository Summary
| Description | Python library (and some tools) for converting ROS bagfiles to Pandas dataframes. |
| Checkout URI | https://github.com/eurogroep/rosbag_pandas.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-08-25 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| rosbag_pandas | 0.5.4 |
README
rosbag_pandas

Python library (and some tools) for converting ROS bagfiles to Pandas dataframes.
Python library
import rosbag_pandas
# Convert a ROSBag to a dataframe
df = rosbag_pandas.bag_to_dataframe('data/rosout.bag')
df_exclude = rosbag_pandas.bag_to_dataframe('data/example.bag', exclude=['/scan'])
df_include = rosbag_pandas.bag_to_dataframe('data/rosout.bag', include=['/rosout'])
# Select a dataframe key based on topic and (conform msgevalgen pattern http://docs.ros.org/api/rostopic/html/)
print(df['/rosout/header/stamp/secs'].to_string())
# Obtain possible ROS topics from a selection pattern (conform msgevalgen pattern http://docs.ros.org/api/rostopic/html/)
# This will return the possible topics: /pose, /pose/pose, /pose/pose/position
rosbag_pandas.topics_from_keys(["/pose/pose/position/x"])
Key definition
Key definition conform the msgevalgen pattern http://docs.ros.org/api/rostopic/html/). Example:
/pose/pose/position/x
This will select the /pose/position/x property of topic /pose in the message of type http://docs.ros.org/api/geometry_msgs/html/msg/PoseStamped.html.
Scripts
bag_csv
Convert a ROS bag file to a CSV file:
usage: bag_csv [-h] [-b BAG] [-i [INCLUDE [INCLUDE ...]]]
[-e [EXCLUDE [EXCLUDE ...]]] [-o OUTPUT] [-v]
Script to parse bagfile to csv file
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-i [INCLUDE [INCLUDE ...]], --include [INCLUDE [INCLUDE ...]]
List for topics to include
-e [EXCLUDE [EXCLUDE ...]], --exclude [EXCLUDE [EXCLUDE ...]]
List for topics to exclude
-o OUTPUT, --output OUTPUT
name of the output file
-v, --verbose Log verbose
bag_plot
Plot a key (or multiple keys) in a ROS bag file:
usage: bag_plot [-h] -b BAG -k [KEY [KEY ...]] [-y YLIM YLIM] [-c] [-v]
Bagfile key to graph
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-k [KEY [KEY ...]], --key [KEY [KEY ...]]
Key you would like to plot
-y YLIM YLIM, --ylim YLIM YLIM
Set min and max y lim
-c, --combined Graph them all on one
-v, --verbose Log verbose
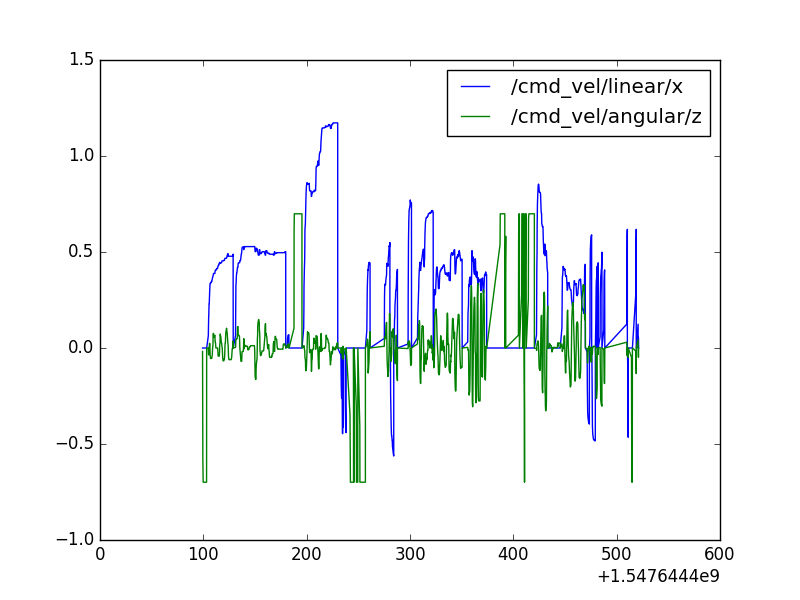
Example
bag_plot -b 2019-01-16-14-14-37.bag -k /cmd_vel/linear/x /cmd_vel/angular/z -c
bag_print
Print a key (or multiple keys) in a ROS bag file:
usage: bag_print [-h] -b BAG -k [KEY [KEY ...]] [-v]
Print one or multiple bag keys
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-k [KEY [KEY ...]], --key [KEY [KEY ...]]
Key you would like to print
-v, --verbose Log verbose
CONTRIBUTING
Repository Summary
| Description | Python library (and some tools) for converting ROS bagfiles to Pandas dataframes. |
| Checkout URI | https://github.com/eurogroep/rosbag_pandas.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-08-25 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| rosbag_pandas | 0.5.4 |
README
rosbag_pandas
Python library (and some tools) for converting ROS bagfiles to Pandas dataframes.
Python library
import rosbag_pandas
# Convert a ROSBag to a dataframe
df = rosbag_pandas.bag_to_dataframe('data/rosout.bag')
df_exclude = rosbag_pandas.bag_to_dataframe('data/example.bag', exclude=['/scan'])
df_include = rosbag_pandas.bag_to_dataframe('data/rosout.bag', include=['/rosout'])
# Select a dataframe key based on topic and (conform msgevalgen pattern http://docs.ros.org/api/rostopic/html/)
print(df['/rosout/header/stamp/secs'].to_string())
# Obtain possible ROS topics from a selection pattern (conform msgevalgen pattern http://docs.ros.org/api/rostopic/html/)
# This will return the possible topics: /pose, /pose/pose, /pose/pose/position
rosbag_pandas.topics_from_keys(["/pose/pose/position/x"])
Key definition
Key definition conform the msgevalgen pattern http://docs.ros.org/api/rostopic/html/). Example:
/pose/pose/position/x
This will select the /pose/position/x property of topic /pose in the message of type http://docs.ros.org/api/geometry_msgs/html/msg/PoseStamped.html.
Scripts
bag_csv
Convert a ROS bag file to a CSV file:
usage: bag_csv [-h] [-b BAG] [-i [INCLUDE [INCLUDE ...]]]
[-e [EXCLUDE [EXCLUDE ...]]] [-o OUTPUT] [-v]
Script to parse bagfile to csv file
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-i [INCLUDE [INCLUDE ...]], --include [INCLUDE [INCLUDE ...]]
List for topics to include
-e [EXCLUDE [EXCLUDE ...]], --exclude [EXCLUDE [EXCLUDE ...]]
List for topics to exclude
-o OUTPUT, --output OUTPUT
name of the output file
-v, --verbose Log verbose
bag_plot
Plot a key (or multiple keys) in a ROS bag file:
usage: bag_plot [-h] -b BAG -k [KEY [KEY ...]] [-y YLIM YLIM] [-c] [-v]
Bagfile key to graph
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-k [KEY [KEY ...]], --key [KEY [KEY ...]]
Key you would like to plot
-y YLIM YLIM, --ylim YLIM YLIM
Set min and max y lim
-c, --combined Graph them all on one
-v, --verbose Log verbose
Example
bag_plot -b 2019-01-16-14-14-37.bag -k /cmd_vel/linear/x /cmd_vel/angular/z -c
bag_print
Print a key (or multiple keys) in a ROS bag file:
usage: bag_print [-h] -b BAG -k [KEY [KEY ...]] [-v]
Print one or multiple bag keys
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-k [KEY [KEY ...]], --key [KEY [KEY ...]]
Key you would like to print
-v, --verbose Log verbose