
Repository Summary
| Description | |
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.0 |
README
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
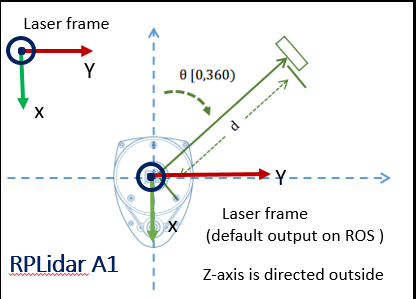
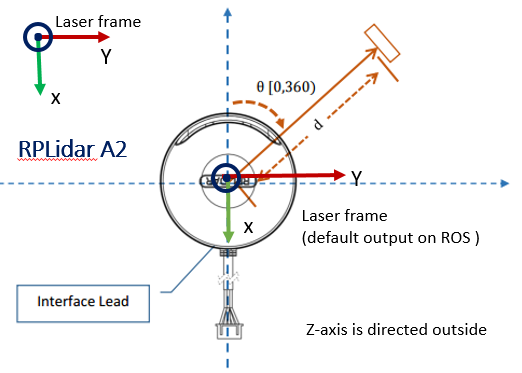
Frame Orientation
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.0 |
README
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.0 |
README
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.0 |
README
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
CONTRIBUTING
Repository Summary
| Description | |
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.0 |
README
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation