
No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | ROS package for a 2D path planner using the Rapidly Exploring Random Trees (RRT) algorithm |
| Checkout URI | https://github.com/naivehobo/rrtplanner.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-04-10 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | robotics pathfinding rrt path-planning ros planning rrt-star |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
README
Rapidly Exploring Random Tree (RRT) Planner
ROS package for a 2D path planner using the Rapidly Exploring Random Trees (RRT) algorithm. This repository contains two packages.
roslaunch planner rrt_planner.launch
Installation
Clone this repository in a catkin workspace and run the following command to build the packages:
catkin build
Planner
The planner package provides an implementation of the RRT algorithm.

To run the rrt planner node:
roslaunch planner rrt_planner_node.launch
The following parameters can be set in the launch file:
-
map_topic (default: "/map"): Topic where the map is published (type: nav_msgs/OccupancyGrid) -
goal_topic (default: "/goal"): Topic where goal is published (type: geometry_msgs/Pose2D) -
pose_topic (default: "/pose"): Topic where starting position is published (type: geometry_msgs/Pose2D) -
max_vertices (default: 1500): Maximum vertices to be added to graph after which goal search should be stopped -
step_size (default: 20): Size of steps. Bigger steps means smaller graphs but more time and vice versa
Mapping
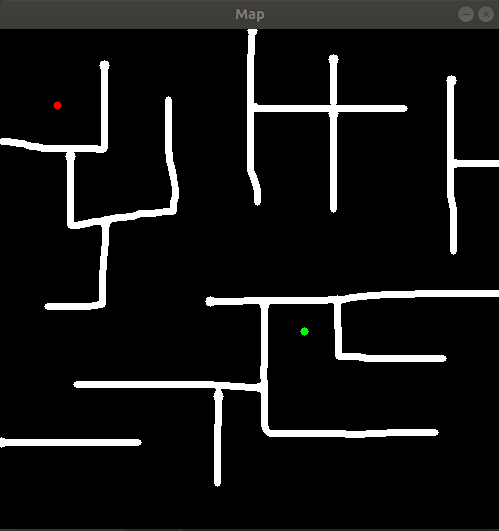
The mapping package provides a minimalistic GUI to draw obstacles in a 2D environment and choose starting position and goal.
To run the mapping node:
roslaunch mapping mapping_node.launch
The following parameters can be set in the launch file:
-
map_topic (default: "/map"): Topic where the map should be published (type: nav_msgs/OccupancyGrid) -
goal_topic (default: "/goal"): Topic where goal should be published (type: geometry_msgs/Pose2D) -
pose_topic (default: "/pose"): Topic where starting position should be published (type: geometry_msgs/Pose2D) -
height (default: 500): Height of map -
width (default: 500): Width of map -
resolution (default: 0.05): Resolution of map -
save_map (default: "none"): If this parameter is set, the created map will be stored to this path -
load_map (default: "none"): If this parameter is set, map will be loaded from an image file at this path
When running the mapping node:
- Press ‘q’ to quit
- Press ‘s’ to save and move on
- Press numbers to the keyboard to change width of paint brush
- Right-click to toggle between eraser and paint brush
CONTRIBUTING
No CONTRIBUTING.md found.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro ardent. Known supported distros are highlighted in the buttons above.
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
No version for distro crystal. Known supported distros are highlighted in the buttons above.
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
No version for distro dashing. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro foxy. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro lunar. Known supported distros are highlighted in the buttons above.
No version for distro jade. Known supported distros are highlighted in the buttons above.
No version for distro indigo. Known supported distros are highlighted in the buttons above.
No version for distro hydro. Known supported distros are highlighted in the buttons above.
No version for distro kinetic. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.