
Repository Summary
| Description | |
| Checkout URI | https://github.com/shilpaj1994/turtlesim-sketch.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-10-02 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| dynamic_reconfigure | 1.7.1 |
| image_thresholding | 0.0.0 |
| sketch | 0.0.0 |
README
Project: Turtle-Sketch
Overview
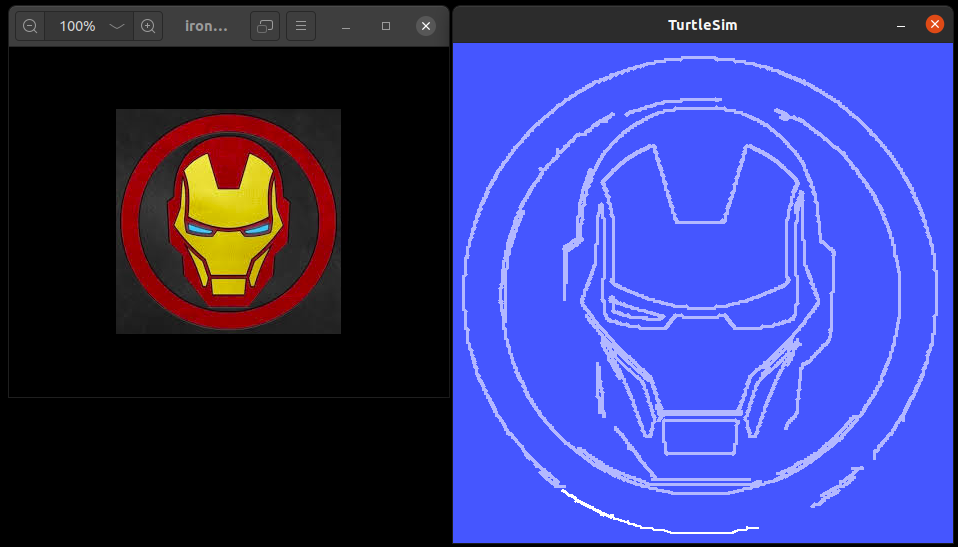
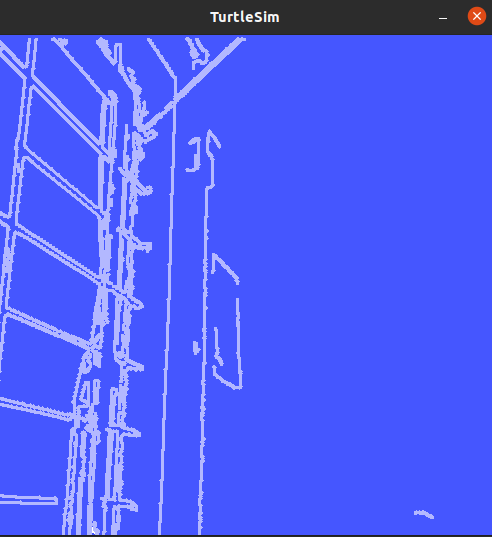
- In this project, the image on the left is taken as input and the image on the right is obtained as output by using turtlesim
-
The image on the left can be selected using it’s path as well as can be directly taken from the camera
-
The below videos show the project in action
Click on the below animations for full video
Using an image
Using webcam
Concepts Used
Following are the concepts used for this project:
-
Dynamic reconfigure
- To import the image using path
- To import the image using camera
- To set thresholds for Canny edge detection
-
ROS parameters
- To set the values of threshold parameters
- To fetch the values of threshold parameters
-
ROS services
- To spawn the turtles
- To teleport the turtle
- To set the status of a pen as - ON/OFF
- To remove the turtles after sketch is completed
-
OpenCV
- To import image
- To find the edges using Canny edge detection
- To find the contours
-
Multi-processing
- To spawn an army of turtles to draw the sketch
Directory Structure
- The directory contains 3 packages:
sketchdynamic reconfigureimage_thresholding
- Sketch directory structure
├── CMakeLists.txt
├── docs # Supported files for documentation
│ ├── Contours.png
│ ├── done.png
│ ├── dynamic reconfigure.png
│ ├── edges.png
│ ├── Output.png
│ ├── rosgraph.png
│ ├── test.png
│ └── turtles.png
├── include
│ └── sketch
├── launch # Launch Files
│ └── sketcher.launch
├── package.xml
├── README.md
├── nodes # ROS Nodes
│ ├── ironman.jpeg
│ ├── sketcher.py
│ └── Turtle.py
└── TODO.md # TO DO for next version
- Image_thresholding directory structure
.
├── cfg # Configuration file for GUI
│ ├── import.cfg # GUI params related to image import
│ └── thresholds.cfg # GUI params related to image thresholding
├── CMakeLists.txt
├── include
│ └── dynamic_parameters
├── launch # Launch files
│ └── canny_thresholding.launch # Launch - GUI for Canny edge detection
├── nodes # ROS Nodes
│ ├── get_values.py
│ ├── import_server.py # Import Image import parameters in python node
│ └── server.py # Import thresholding parameters in python node
└── package.xml
Coding Style Guide - PEP8
Dependencies
-
dynamic reconfigurepackage OpenCV
Setup and Run
To run the project on your local system, follow the procedure:
- Download the packages -
sketch,image_thresholding, anddynamic-reconfigure-noetic-devel - Copy these packages to your ROS workspace i.e.
~/ROS_ws/src/ - Build the workspace
$ cd ~/ROS_ws/$ catkin_make
-
Open new terminal and source the ROS workspace -
source ~/ROS_ws/devel/setup.bash -
Run the command -
$ roslaunch sketch sketcher.launch -
This command will open turtlesim and GUI for this project
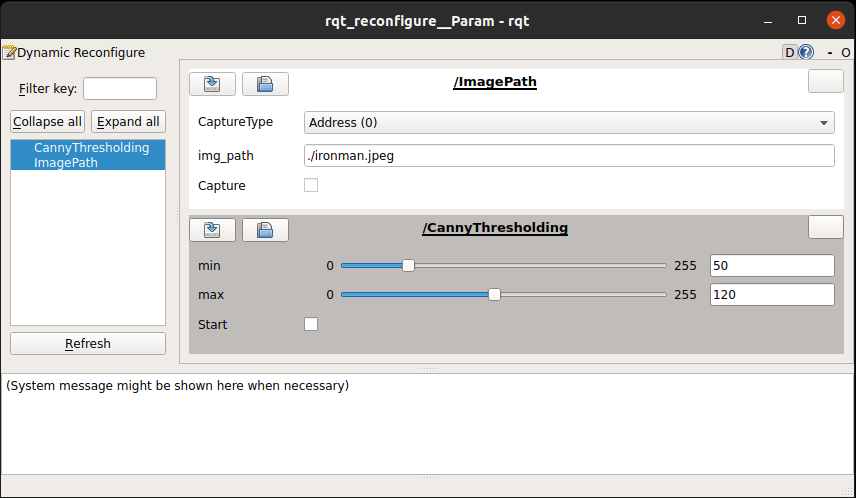
- You can select image Address (0) or Camera (1) option for
CaptureType - If you select Address (0), insert the path of the image on you system in the
img_pathsection -
Then click on the checkbox in front of
Capture -
If you select Camera (0), camera window will pop-up and you can click on the checkbox in front of
Captureonce you get the desired frame -
This will open up a window with edges in the selected frame
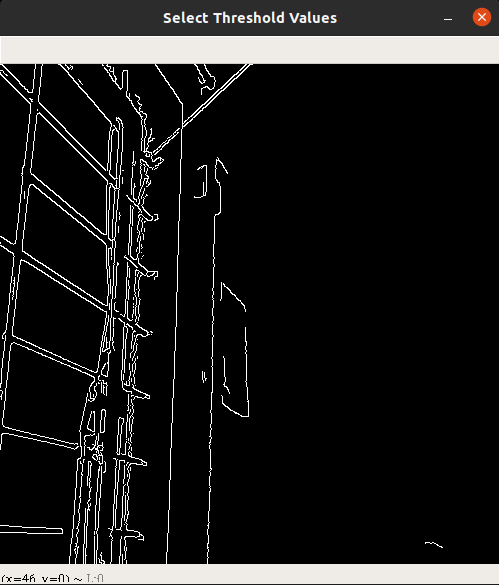
-
Now, use the GUI to set minimum and maximum threshold values to get the desired contours
-
Click on the checkbox in front of
Startto spawn an army of turtles which will sketch these contours for you
-
After the sketch is completed, the turtles will disappear
Note:
- If you want to change the approach to sequential from parallel, follow the steps:
- Open launch file in this directory
~/ROS_ws/sketch/launch/ - The
argtag for the sketcher node has a value of 1 - Change this value to
0
- Open launch file in this directory
- Here, 0 = sequential execution and 1 = parallel execution
Article

Contact
![]()
![]()
![]()