
|
dnn_node_example package from hobot_dnn repodnn_benchmark_example dnn_node dnn_node_example dnn_node_sample |
Package Summary
| Tags | No category tags. |
| Version | 2.4.1 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/d-robotics/hobot_dnn.git |
| VCS Type | git |
| VCS Version | develop |
| Last Updated | 2024-12-16 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- zhukao
Authors
| English | 简体中文 |
Getting Started with DNN Node Example
Introduction
Dnn Node example package is a usage example of Dnn Node package. By inheriting the DnnNode virtual base class, it utilizes the BPU processor for model inference with model and image data. Image data can come from local image injection and subscribed image msg. By configuring the built-in post-processing algorithms in dnn_node, intelligent results are published in the post-processing of dnn node example, and the effects can be viewed through a web interface.
Development Environment
- Programming Language: C/C++
- Development Platform: X3/Ultra/X5/X86
- System: Ubuntu 20.04/Ubuntu 22.04
- Compilation Toolchain: Linux GCC 9.3.0/Linaro GCC 11.4.0
Compilation
-
X3: Supports compilation on the X3 Ubuntu system and cross-compilation using Docker on a PC.
-
Ultra: Supports compilation on the Ultra Ubuntu system and cross-compilation using Docker on a PC.
-
X5: Supports compilation on the X5 Ubuntu system and cross-compilation using Docker on a PC.
-
X86: Supports compilation on the X86 Ubuntu system.
It also supports controlling the dependencies and functionality of the compiled pkg through compilation options.
Dependency Libraries
- OpenCV: 3.4.5
ROS Packages:
- dnn node
- cv_bridge
- sensor_msgs
- hbm_img_msgs
- ai_msgs
- hobot_cv
hbm_img_msgs is a custom image message format used for image transmission in shared memory scenarios. The hbm_img_msgs pkg is defined in hobot_msgs; therefore, if shared memory is used for image transmission, this pkg is required.
Compilation Options
- SHARED_MEM
- Shared memory transmission switch, enabled by default (ON), can be turned off during compilation using the -DSHARED_MEM=OFF command.
- When enabled, compilation and execution depend on the hbm_img_msgs pkg and require the use of tros for compilation.
- When disabled, compilation and execution do not depend on the hbm_img_msgs pkg, supporting compilation using native ROS and tros.
- For shared memory communication, only subscription to nv12 format images is currently supported.
Compile on X3/Ultra/X5 Ubuntu System
- Compilation Environment Verification
- The Ubuntu system is installed on the board.
- The current compilation terminal has set up the TogetherROS environment variable:
source PATH/setup.bash. Where PATH is the installation path of TogetherROS. - The ROS2 compilation tool colcon is installed. If the installed ROS does not include the compilation tool colcon, it needs to be installed manually. Installation command for colcon:
pip install -U colcon-common-extensions. - The dnn node package has been compiled.
- Compilation
- Compilation command:
colcon build --packages-select dnn_node_example
Docker Cross-Compilation for X3/Rdkultra Version
- Compilation Environment Verification
- Compilation within docker, and TogetherROS has been installed in the docker environment. For instructions on docker installation, cross-compilation, TogetherROS compilation, and deployment, please refer to the README.md in the robot development platform’s robot_dev_config repo.
- The dnn node package has been compiled.
- The hbm_img_msgs package has been compiled (see Dependency section for compilation methods).
- Compilation
- Compilation command:
# RDK X3
bash robot_dev_config/build.sh -p X3 -s dnn_node_example
# RDK Ultra
bash robot_dev_config/build.sh -p Rdkultra -s dnn_node_example
# RDK X5
bash robot_dev_config/build.sh -p X5 -s dnn_node_example
- Shared memory communication method is enabled by default in the compilation options.
Compile on X86 Ubuntu System
- Compilation Environment Verification
X86 Ubuntu version: ubuntu20.04
- Compilation
- Compilation command:
colcon build --packages-select dnn_node_example \
--merge-install \
--cmake-force-configure \
--cmake-args \
--no-warn-unused-cli \
-DPLATFORM_X86=ON \
-DTHIRD_PARTY=`pwd`/../sysroot_docker
Usage guide
Package Description
The source code contains the dnn_node_example package, which can be configured to use the post-processing algorithms built into the dnn_node. Currently, the dnn_node supports post-processing algorithms such as “yolov2,” “yolov3,” “yolov5,” “yolov5x,” “yolov8”, “yolov10”, “FasterRcnn”, “mobilenetv2,” “mobilenet_ssd,” “efficient_det,” “fcos,” and “mobilenet_unet.”
Dependencies
- mipi_cam package: Publishes image messages
- websocket package: Renders images and AI perception messages
Parameters
| Parameter Name | Explanation | Mandatory | Default Value | Remarks |
|---|---|---|---|---|
| feed_type | Image source, 0: local; 1: subscribe | No | 0 | |
| image | Local image path | No | config/test.jpg | |
| image_type | Image format, 0: bgr; 1: nv12 | No | 0 | |
| image_width | Width of locally filled nv12 format image | Must be set for nv12 format image | 0 | |
| image_height | Height of locally filled nv12 format image | Must be set for nv12 format image | 0 | |
| is_shared_mem_sub | Subscribe to images using shared memory communication method | No | 0 | |
| config_file | Path to the configuration file | No | “config/fcosworkconfig.json” | Change the configuration file to use different models, default uses FCOS model |
| dump_render_img | Whether to render, 0: no; 1: yes | No | 0 | |
| msg_pub_topic_name | Topic name for publishing intelligent results for web display | No | hobot_dnn_detection | |
| ros_img_topic_name | Subscribe to the topic name of an Image message of type sensor_msgs::msg::Image | No | /image | |
| sharedmem_img_topic_name | Subscribe to the topic name of the hbm_img_msgs::msg::HbmMsg1080P type image message | No | /hbmem_img |
Execution
-
The models used by dnn_node_example are already installed during tros.b installation. The RDK X3 is installed in
/opt/hobot/model/x3/basic, the RDK Ultra is installed in/opt/hobot/model/rdkultra/basic/, and the RDK X5 is installed in/opt/hobot/model/x5/basic/after a successful build. -
After compilation, copy the generated install path to the D-Robotics RDK (if compiling on the RDK, skip the copying step) and run the following command.
X3 Ubuntu
Running mode 1, use the executable file to start:
export COLCON_CURRENT_PREFIX=./install
source ./install/local_setup.bash
# The config includes models used by the example and local images for filling
# Copy based on the actual installation path (the installation path in the docker is install/lib/dnn_node_example/config/, the copy command is cp -r install/lib/dnn_node_example/config/ .).
cp -r install/dnn_node_example/lib/dnn_node_example/config/ .
# Run mode 1:To use the yolov3 model and the yolov3 post-processing algorithm built into dnn_node, configure to perform inference in synchronous mode using a local jpg format image and store the rendered image:
ros2 run dnn_node_example example --ros-args -p feed_type:=0 -p image:=config/test.jpg -p image_type:=0 -p dump_render_img:=1 -p config_file:=config/yolov3workconfig.json
# Run mode 2:Configure to use the yolov2 model and the yolov2 post-processing algorithm built into dnn_node, perform inference in asynchronous mode using the subscribed image message (topic is /image_raw), and set the log level to warn:
ros2 run dnn_node_example example --ros-args -p feed_type:=1 --ros-args --log-level warn -p config_file:=config/yolov2workconfig.json
# Run mode 3: Use shared memory communication method (topic is /hbmem_img) to perform inference in asynchronous mode and set the log level to warn:
ros2 run dnn_node_example example --ros-args -p feed_type:=1 -p is_shared_mem_sub:=1 --ros-args --log-level warn
To run in mode 2 using a launch file:
export COLCON_CURRENT_PREFIX=./install
source ./install/setup.bash
# Copy the configuration based on the actual installation path
cp -r install/lib/dnn_node_example/config/ .
# Configure MIPI camera
export CAM_TYPE=mipi
# Start the launch file, publish nv12 format images using shared memory with F37 sensor
# By default, it runs the fcos algorithm, switch algorithms using the config_file parameter in the launch command, e.g., to use unet algorithm: config_file:="config/mobilenet_unet_workconfig.json"
ros2 launch dnn_node_example dnn_node_example.launch.py
X3 Yocto
export ROS_LOG_DIR=/userdata/
export LD_LIBRARY_PATH=${LD_LIBRARY_PATH}:./install/lib/
# Copy the configuration used by the example and the local image used for inference
cp -r install/lib/dnn_node_example/config/ .
# Run mode 1: Perform inference in synchronous mode using a local jpg format image and store the rendered image
./install/lib/dnn_node_example/example --ros-args -p feed_type:=0 -p image:=config/test.jpg -p image_type:=0 -p dump_render_img:=1
# Run mode 2: Perform inference in asynchronous mode using the subscribed image message (topic is /image_raw) and set log level to warn
./install/lib/dnn_node_example/example --ros-args -p feed_type:=1 --log-level warn
# Run mode 3: Perform inference in asynchronous mode using shared memory communication (topic is /hbmem_img) and set log level to warn
./install/lib/dnn_node_example/example --ros-args -p feed_type:=1 -p is_shared_mem_sub:=1 --ros-args --log-level warn
X86 Ubuntu
export COLCON_CURRENT_PREFIX=./install
source ./install/setup.bash
# Copy the model used in the config as an example, adjust based on the actual installation path
cp -r ./install/lib/dnn_node_example/config/ .
# Launch the file using feedback mode
# By default, the FCOS algorithm will run. To switch algorithms using the config_file parameter, for example, to use the UNet algorithm: config_file:="config/mobilenet_unet_workconfig.json"
ros2 launch dnn_node_example dnn_node_example_feedback.launch.py
Ultra Ubuntu
export COLCON_CURRENT_PREFIX=install
source install/setup.bash
# Launch using feedback mode and switch algorithms using config_file parameter
ros2 launch dnn_node_example dnn_node_example_feedback.launch.py dnn_example_config_file:=config/mobilenetv2workconfig.json dnn_example_image:=config/target_class.jpg
# Using MIPI camera as input for image data and switch algorithms using config_file parameter
export CAM_TYPE=usb
ros2 launch dnn_node_example dnn_node_example.launch.py dnn_example_config_file:=config/mobilenetv2workconfig.json
Notes
- The config_file configuration file format is JSON. Here is an example configuration for the YOLOv5 model:
{
"model_file": "/opt/hobot/model/x3/basic/yolov5_672x672_nv12.bin",
"dnn_Parser": "yolov5",
"model_output_count": 3,
"class_num": 80,
"cls_names_list": "config/coco.list",
"strides": [8, 16, 32],
"anchors_table": [[[10, 13], [16, 30], [33, 23]], [[30, 61], [62, 45], [59, 119]], [[116, 90], [156, 198], [373, 326]]],
"score_threshold": 0.4,
"nms_threshold": 0.5,
"nms_top_k": 5000
}
“model_file” indicates the path to the model file.
Models currently supported by the example:
| Model Name | Model Type | Platform Support | Model Output Description | Rendering Effect |
| ————————————– | ———- | —————- | —————————————- | ————————————— |
| yolov2_608x608_nv12 | Detection Model | x3/x86 | Output objects detected and bounding boxes | 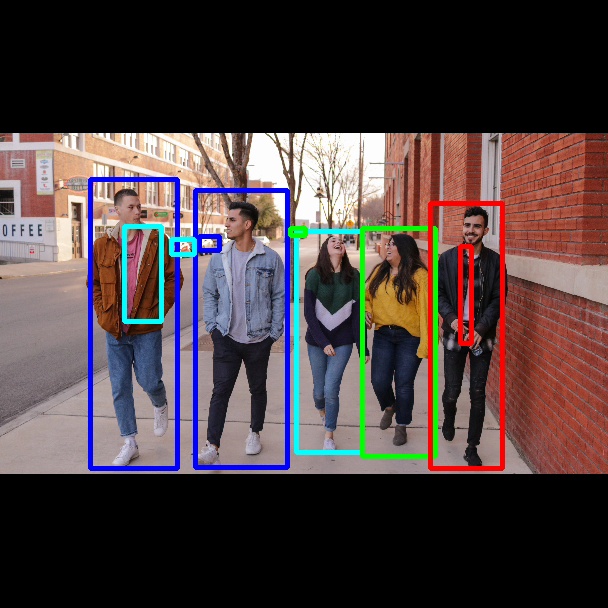 |
| yolov3_416x416_nv12 | Detection model | x3/x86 | Output detected objects and bounding boxes |
|
| yolov3_416x416_nv12 | Detection model | x3/x86 | Output detected objects and bounding boxes | 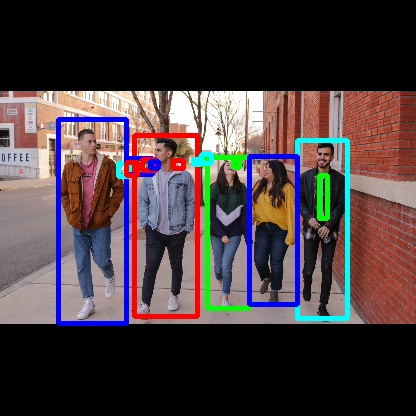 |
| yolov5_672x672_nv12 | Detection model | x3 | Output detected objects and bounding boxes |
|
| yolov5_672x672_nv12 | Detection model | x3 | Output detected objects and bounding boxes | 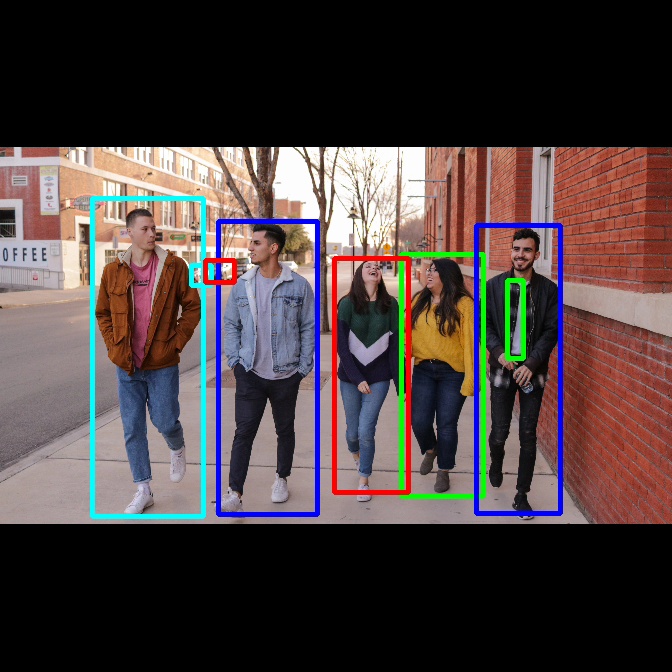 |
| yolov5x_672x672_nv12 | Detection model | Rdkultra | Output detected objects and bounding boxes |
|
| yolov5x_672x672_nv12 | Detection model | Rdkultra | Output detected objects and bounding boxes | 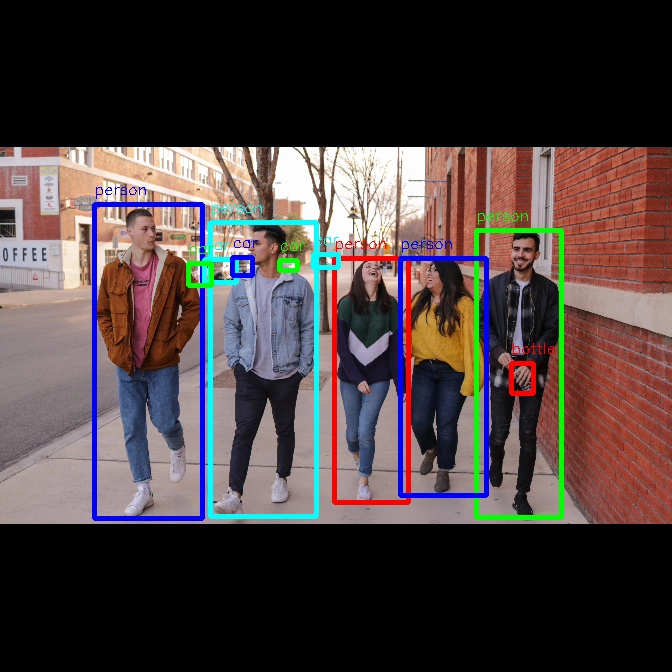 |
| yolov8_416x416_nv12 | Detection model | x3/x5/x86 | Output detected objects and bounding boxes |
|
| yolov8_416x416_nv12 | Detection model | x3/x5/x86 | Output detected objects and bounding boxes | 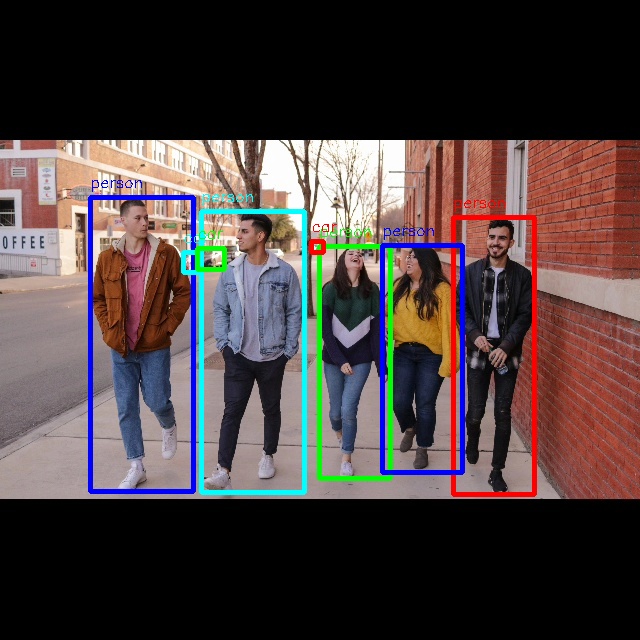 |
| yolov10_416x416_nv12 | Detection model | x3/x5/x86 | Output detected objects and bounding boxes |
|
| yolov10_416x416_nv12 | Detection model | x3/x5/x86 | Output detected objects and bounding boxes | 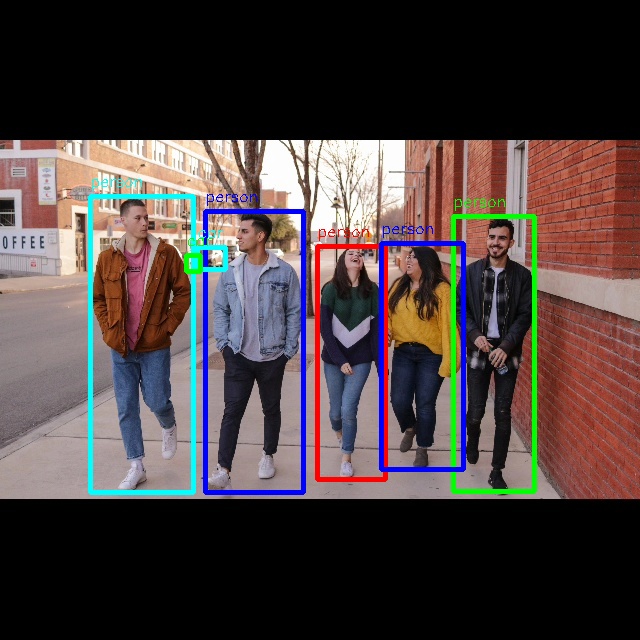 |
| mobilenet_ssd_300x300_nv12 | Detection model | x3/x86 | Output detected objects and bounding boxes |
|
| mobilenet_ssd_300x300_nv12 | Detection model | x3/x86 | Output detected objects and bounding boxes | 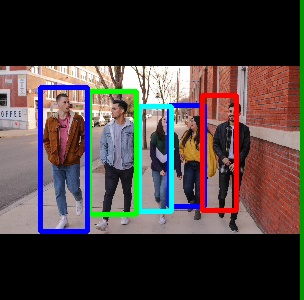 |
| fcos_512x512_nv12 | Detection model | x3/x86 | Output detected objects and bounding boxes |
|
| fcos_512x512_nv12 | Detection model | x3/x86 | Output detected objects and bounding boxes |  |
| efficient_det_no_dequanti_512x512_nv12 | Detection model | x3 | Output detected objects and bounding boxes |
|
| efficient_det_no_dequanti_512x512_nv12 | Detection model | x3 | Output detected objects and bounding boxes | 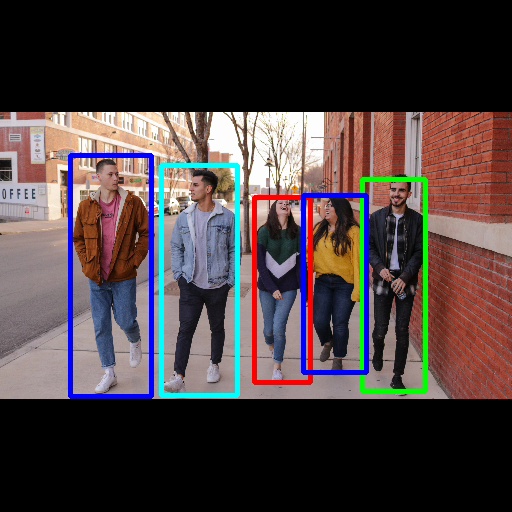 |
| multitask_body_kps_960x544.hbm | Detection model | x3/x86 | Output detected body bounding boxes and human keypoint indices |
|
| multitask_body_kps_960x544.hbm | Detection model | x3/x86 | Output detected body bounding boxes and human keypoint indices | 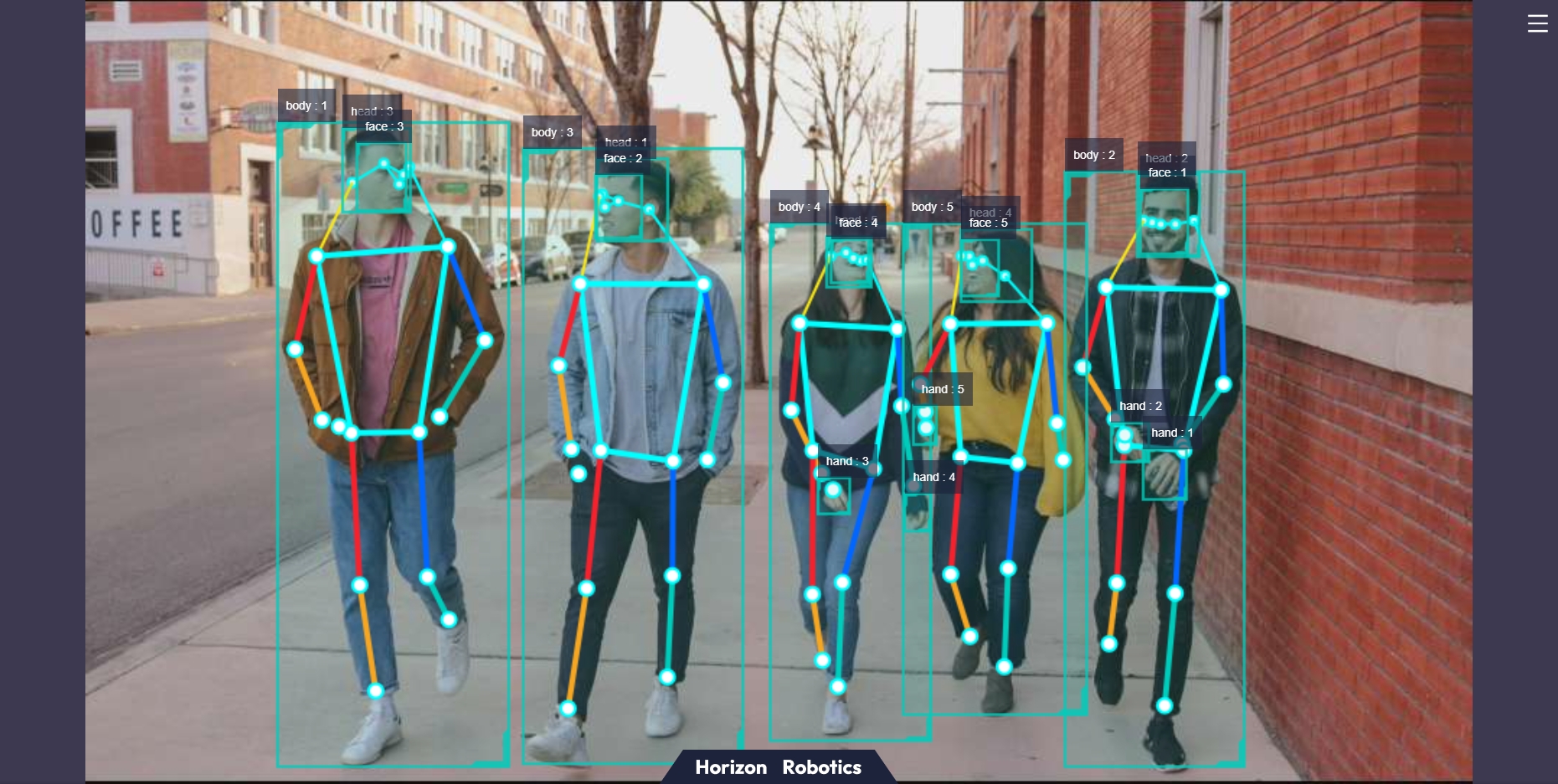 |
| mobilenetv2_224x224_nv12.bin | Classification model | x3/x86 | Output the class result with the highest confidence |
|
| mobilenetv2_224x224_nv12.bin | Classification model | x3/x86 | Output the class result with the highest confidence |  |
| mobilenet_unet_1024x2048_nv12.bin | Segmentation model | x3/x86 | Semantic segmentation, output image with each pixel corresponding to its class |
|
| mobilenet_unet_1024x2048_nv12.bin | Segmentation model | x3/x86 | Semantic segmentation, output image with each pixel corresponding to its class |  |
| yolov8_seg_672x672_nv12 | Segmentation model | x5/x86 | Instance segmentation, output the detected objects and their corresponding pixels |
|
| yolov8_seg_672x672_nv12 | Segmentation model | x5/x86 | Instance segmentation, output the detected objects and their corresponding pixels |  |
|
“dnn_Parser” setting chooses the built-in post-processing algorithm, currently support configurations include "yolov2", "yolov3", "yolov5", "yolov5x", "yolov8", "yolov10", "kps_parser", "classification", "ssd", "efficient_det", "fcos", "unet", "yolov8seg".
“model_output_count” represents the number of model output branches.
- Segmentation model algorithm currently only supports local image feedback and does not have web display functionality.
Results
X3
log:
Command executed: ros2 run dnn_node_example example --ros-args -p config_file:=config/yolov3workconfig.json -p dump_render_img:=1
[WARN] [1684542863.055571066] [example]: This is dnn node example!
[WARN] [1684542863.133229900] [example]: Parameter:
feed_type(0:local, 1:sub): 0
image: config/test.jpg
image_type: 0
dump_render_img: 1
is_shared_mem_sub: 0
model_file_name: /app/model/basic/yolov3_416x416_nv12.bin
[INFO] [1684542863.149125191] [dnn]: Node init.
[INFO] [1684542863.149228733] [example]: Set node para.
[INFO] [1684542863.149285441] [dnn]: Model init.
[BPU_PLAT]BPU Platform Version(1.3.1)!
[HBRT] set log level as 0. version = 3.13.27
[DNN] Runtime version = 1.8.4_(3.13.27 HBRT)
[HorizonRT] The model builder version = 1.6.8
[000:000] (model.cpp:244): Empty desc, model name: yolov3_416x416_nv12, input branch:0, input name:data
[000:000] (model.cpp:313): Empty desc, model name: yolov3_416x416_nv12, output branch:0, output name:layer82-conv-transposed
[000:000] (model.cpp:313): Empty desc, model name: yolov3_416x416_nv12, output branch:1, output name:layer94-conv-transposed
[000:000] (model.cpp:313): Empty desc, model name: yolov3_416x416_nv12, output branch:2, output name:layer106-conv-transposed
[INFO] [1684542864.119252525] [dnn]: The model input 0 width is 416 and height is 416
[INFO] [1684542864.119363442] [example]: Set output parser.
[INFO] [1684542864.119542525] [dnn]: Task init.
[INFO] [1684542864.121412067] [dnn]: Set task_num [2]
[INFO] [1684542864.121486859] [example]: The model input width is 416 and height is 416
[INFO] [1684542864.121529775] [example]: Dnn node feed with local image: config/test.jpg
```[INFO] [1684542866.023484026] [example]: task_num: 2
[INFO] [1684542866.200993943] [Yolo3Darknet_detection_parser]: dep out size: 3 3
[INFO] [1684542866.319497818] [example]: Output from image_name: config/test.jpg, frame_id: , stamp: 0.0
[INFO] [1684542866.319713068] [PostProcessBase]: outputs size: 3
[INFO] [1684542866.319767526] [PostProcessBase]: out box size: 11
[INFO] [1684542866.319839151] [PostProcessBase]: det rect: 300.004 68.3111 347.666 415, det type: person, score:0.999796
[INFO] [1684542866.319934693] [PostProcessBase]: det rect: 248.503 104.931 300.809 397.489, det type: person, score:0.999763
[INFO] [1684542866.320014818] [PostProcessBase]: det rect: 62.517 53.741 123.072 414.076, det type: person, score:0.999734
[INFO] [1684542866.320092193] [PostProcessBase]: det rect: 202.355 108.962 251.666 396.325, det type: person, score:0.999712
[INFO] [1684542866.320165276] [PostProcessBase]: det rect: 132.448 70.7646 196.075 415, det type: person, score:0.999361
[INFO] [1684542866.320286360] [PostProcessBase]: det rect: 117.439 129.264 130.877 152.227, det type: car, score:0.940759
[INFO] [1684542866.320360610] [PostProcessBase]: det rect: 201.869 117.786 210.163 130.43, det type: car, score:0.914081
[INFO] [1684542866.320433443] [PostProcessBase]: det rect: 125.557 124.45 149.921 149.43, det type: car, score:0.81808
[INFO] [1684542866.320505526] [PostProcessBase]: det rect: 173.927 125.132 184.199 136.716, det type: car, score:0.811718
[INFO] [1684542866.320589943] [PostProcessBase]: det rect: 143.016 121.023 156.819 143.535, det type: car, score:0.451065
[INFO] [1684542866.320663485] [PostProcessBase]: det rect: 235.168 120.715 242.281 131.487, det type: car, score:0.406651
[INFO] [1684542866.324350193] [ImageUtils]: target size: 11
[INFO] [1684542866.324494110] [ImageUtils]: target.rois.size: 1
[INFO] [1684542866.324536068] [ImageUtils]: roi.type:
[INFO] [1684542866.324574110] [ImageUtils]: roi x_offset: 300 y_offset: 68 width: 47 height: 346
[INFO] [1684542866.325962026] [ImageUtils]: target.rois.size: 1
[INFO] [1684542866.326007568] [ImageUtils]: roi.type:
[INFO] [1684542866.326044610] [ImageUtils]: roi x_offset: 248 y_offset: 104 width: 52 height: 292
[INFO] [1684542866.326231151] [ImageUtils]: target.rois.size: 1
[INFO] [1684542866.326270651] [ImageUtils]: roi.type:
[INFO] [1684542866.326306860] [ImageUtils]: roi x_offset: 62 y_offset: 53 width: 60 height: 360
[INFO] [1684542866.326534235] [ImageUtils]: target.rois.size: 1
[INFO] [1684542866.326573651] [ImageUtils]: roi.type:
[INFO] [1684542866.326609818] [ImageUtils]: roi x_offset: 202 y_offset: 108 width: 49 height: 287
[INFO] [1684542866.326794193] [ImageUtils]: target.rois.size: 1
[INFO] [1684542866.326833235] [ImageUtils]: roi.type:
[INFO] [1684542866.326868985] [ImageUtils]: roi x_offset: 132 y_offset: 70 width: 63 height: 344
[INFO] [1684542866.327076401] [ImageUtils]: target.rois.size: 1
[INFO] [1684542866.327115526] [ImageUtils]: roi.type:
[INFO] [1684542866.327151735] [ImageUtils]: roi x_offset: 117 y_offset: 129 width: 13 height: 22
[INFO] [1684542866.327214526] [ImageUtils]: target.rois.size: 1
[INFO] [1684542866.327252235] [ImageUtils]: roi.type:
[INFO] [1684542866.327374943] [ImageUtils]: roi x_offset: 201 y_offset: 117 width: 8 height: 12
[INFO] [1684542866.327435901] [ImageUtils]: target.rois.size: 1
[INFO] [1684542866.327473651] [ImageUtils]: roi.type:
[INFO] [1684542866.327509360] [ImageUtils]: roi x_offset: 125 y_offset: 124 width: 24 height: 24
[INFO] [1684542866.327573818] [ImageUtils]: target.rois.size: 1
[INFO] [1684542866.327611401] [ImageUtils]: roi.type:
[INFO] [1684542866.327647193] [ImageUtils]: roi x_offset: 173 y_offset: 125 width: 10 height: 11
[INFO] [1684542866.327704818] [ImageUtils]: target.rois.size: 1
[INFO] [1684542866.327742026] [ImageUtils]: roi.type:
[INFO] [1684542866.327777318] [ImageUtils]: roi x_offset: 143 y_offset: 121 width: 13 height: 22
[INFO] [1684542866.327839360] [ImageUtils]: target.rois.size: 1
[INFO] [1684542866.365547943] [ImageUtils]: roi.type:
[INFO] [1684542866.365588651] [ImageUtils]: roi x_offset: 235 y_offset: 120 width: 7 height: 10[WARN] [1684542866.365663276] [ImageUtils]: Draw result to file: render__0_0.jpeg
[WARN] [1684542866.386982151] [example]: Smart fps = 1
Rendered image:
Web
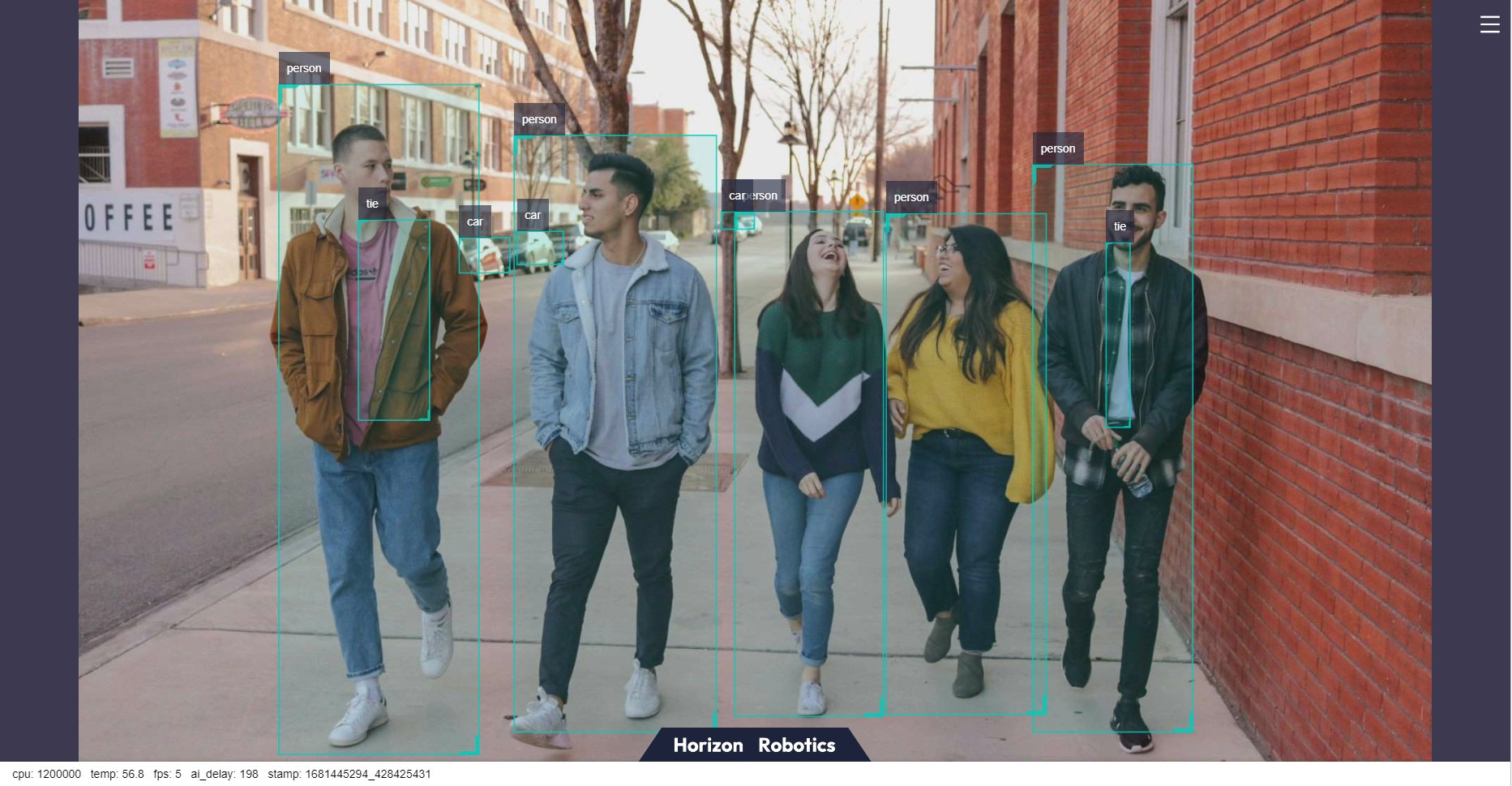
The web demonstration uses the model detection results of yolov2. The startup process is as follows:
# 1 Start the image publishing node:
ros2 run mipi_cam mipi_cam --ros-args -p out_format:=nv12 -p image_width:=608 -p image_height:=608 -p io_method:=shared_mem --log-level error &
# 2 Start the jpeg image encoding & publishing package
ros2 run hobot_codec hobot_codec_republish --ros-args -p channel:=1 -p in_mode:=shared_mem -p in_format:=nv12 -p out_mode:=ros -p out_format:=jpeg -p sub_topic:=/hbmem_img -p pub_topic:=/image_jpeg --ros-args --log-level error &
# 3 Start the web display package
ros2 run websocket websocket --ros-args -p image_topic:=/image_jpeg -p image_type:=mjpeg -p smart_topic:=/hobot_dnn_detection --log-level error &
# 4 Start the dnn_node_example using asynchronous image loading method to subscribe
ros2 run dnn_node_example example --ros-args -p feed_type:=1 -p is_shared_mem_sub:=1 -p msg_pub_topic_name:=hobot_dnn_detection -p config_file:=config/yolov2workconfig.json
Screenshot of the web demonstration:
Changelog for package dnn_node_example
tros_2.4.1rc2 (2024-11-20)
- 新增对yolo系列模型进行config配置。
- 修复launch文件运行image publish节点失败的问题。
tros_2.4.1 (2024-11-20)
- 新增在config配置任务数功能。
- 依赖的OpenCV版本从3.4.5升级到4.5。
- 新增
stdc分割模型示例。
tros_2.4.0 (2024-07-15)
- 新增支持x5平台支持。
- 新增x5工具链参考算法适配。
- 更新YOLOv8和YOLOv10模型后处理。
- 更新YOLOv8Seg模型后处理。
tros_2.3.0rc1 (2024-04-12)
- 修复未设置
CAM_TYPE情况下example启动失败的问题。
tros_2.3.0 (2024-03-27)
- 新增适配ros2 humble零拷贝。
- 新增中英双语Readme。
- 适配重构dnn_node。
- 新增分割任务发布ai_msgs,支持在Web中显示渲染效果。
- 零拷贝通信使用的qos的Reliability由RMW_QOS_POLICY_RELIABILITY_RELIABLE(rclcpp::QoS())变更为RMW_QOS_POLICY_RELIABILITY_BEST_EFFORT(rclcpp::SensorDataQoS())。
tros_2.2.2 (2023-12-22)
- 更新CMakeLists.txt,解决arm平台打包失败问题。
tros_2.2.1 (2023-07-14)
- 规范Rdkultra产品名。
tros_2.2.0 (2023-07-07)
- 适配RDK Ultra平台。
tros_2.1.0 (2023-06-20)
- 删除针对于多模型的model_name配置项,从模型文件中自动获取model_name。
tros_2.0.0 (2023-05-11)
- 更新package.xml,支持应用独立打包
- 更新应用启动launch脚本
tros_1.1.6 (2023-3-15)
- 更新示例使用的路径,统一个平台使用/opt路径下的模型路径。
- 修复dnn_node_example没有默认配置的问题。
tros_1.1.6b (2023-3-03)
- 修复readme文档错误导致使用错误问题。
tros_1.1.6a (2023-2-16)
- 适配x86版本的dnn node,新增x86版本编译选项。
- 新增launch文件使用fb回灌模式选项。
tros_1.1.4 (2022-12-27)
- 删除未使用的GetNV12Tensor接口。
tros_1.1.3 (2022-11-09)
- 删除接口GetNV12PyramidFromNV12Mat,统一使用dnn_node内部GetNV12PyramidFromNV12Img接口获取NV12PyramidInput数据。
- 前处理中统一将图片padding到左上方。
tros_1.1.2rc2 (2022-10-26)
- 修复回灌启动脚本中默认算法无效的问题。
tros_1.1.2rc1 (2022-10-17)
- 算法后处理中使用dnn node重构后的算法输出解析方法。
- 删除cv_bridge编译宏控制,默认使用cv_bridge。
- 删除同步或异步推理模式配置项is_sync_mode,使用效率更高的异步推理模式。
- 更新yolov2、yolov3、yolov5、fcos算法参数可外部配置方式。
- 支持用户通过配置launch文件中”msg_pub_topic_name”成员,指定发布的AI消息topic。
- 使用板端安装在/app/model/basic/路径下的模型文件。
hhp_1.0.6 (2022-08-31)
- example中算法前处理使用hobot_cv进行图片resize。
hhp_1.0.5 (2022-08-11)
- 修复发布的ROS Msg中算法推理输出帧率数据错误的问题。
- 运行异常时,使用rclcpp::shutdown()触发退出后终止当前状态,避免扩大异常范围。
hhp_1.0.4 (2022-07-26)
- 适配hhp_1.0.4版本dnn_node。
v1.0.1 (2022-06-23)
- 发布的AI msg中增加perf信息输出,用于推理性能分析。
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| mipi_cam | |
| hobot_usb_cam | |
| hobot_image_publisher | |
| hobot_codec | |
| websocket | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| dnn_node | |
| cv_bridge | |
| sensor_msgs | |
| hbm_img_msgs | |
| ai_msgs | |
| hobot_cv | |
| rclcpp_components |