No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
No version for distro github. Known supported distros are highlighted in the buttons above.

|
ipa_3d_fov_visualization package from cob_perception_common repocob_3d_mapping_msgs cob_cam3d_throttle cob_image_flip cob_object_detection_msgs cob_object_detection_visualizer cob_perception_common cob_perception_msgs cob_vision_utils ipa_3d_fov_visualization |
Package Summary
| Tags | No category tags. |
| Version | 0.6.20 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ipa320/cob_perception_common.git |
| VCS Type | git |
| VCS Version | indigo_dev |
| Last Updated | 2024-02-19 |
| Dev Status | END-OF-LIFE |
| CI status | Continuous Integration : 0 / 0 |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
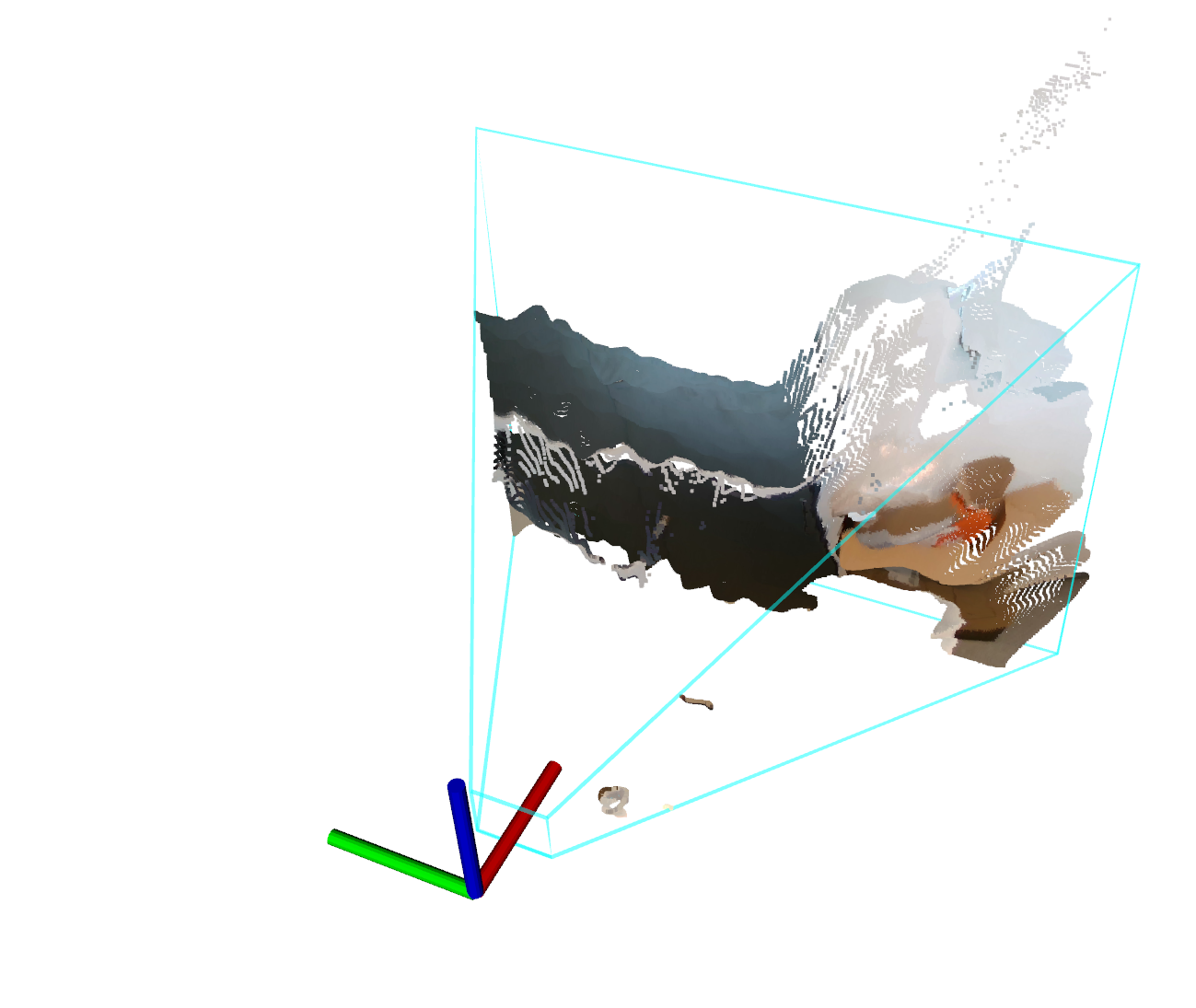
The ipa_3d_fov_visualization package allows to visualize the field-of-view of a camera.
Additional Links
No additional links.
Maintainers
- Florenz Graf
Authors
- Florenz Graf
ipa_3d_fov_visualization
This package visualizes the field of view (FOV) form stereo cameras using the pinhole model.
Requirements:
- System with Ubuntu and ROS http://wiki.ros.org (testet with ROS-Kinetic)
- Stereo Camera (testet with Intel RealSense D435)
Usage:
- Adapt ROS-Topics of the Camera Info in launch-File. e.g.
<remap from="camera_info" to="camera/color/camera_info"/> - Set Parameters in launch file
- How to start?
roslaunch ipa_3d_fov_visualization ipa_3d_fov_visualization.launch
Developers:
To change the line width, color and transparency please go to cpp-File, line 71-74
CHANGELOG
Changelog for package ipa_3d_fov_visualization
0.6.20 (2024-02-19)
0.6.19 (2022-07-29)
0.6.18 (2021-05-10)
- Merge pull request #104 from fmessmer/fix_catkin_lint fix catkin_lint
- fix catkin_lint
- Contributors: Felix Messmer, fmessmer
0.6.17 (2020-10-14)
0.6.16 (2020-10-10)
- Merge pull request #101 from fmessmer/test_noetic test noetic
- Bump CMake version to avoid CMP0048 warning
- Contributors: Felix Messmer, fmessmer
0.6.15 (2020-03-18)
- Merge pull request #99 from fmessmer/ci_updates [travis] ci updates
- catkin_lint fixes
- Contributors: Felix Messmer, fmessmer
0.6.14 (2019-08-06)
0.6.13 (2019-03-14)
- added feature 3d fov visualization
(#91)
- added feature 3d fov visualization
- removed modification
- fixed PR errors from fmesser
- updated PR issues
- fixed tab
- fixed PR requrest
- Update object_detection_visualizer_node.cpp
- changed license
- Contributors: Florenz Graf
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
System Dependencies
No direct system dependencies.
Dependant Packages
No known dependants.
Launch files
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged ipa_3d_fov_visualization at Robotics Stack Exchange
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
|
|
ipa_3d_fov_visualization package from cob_perception_common repocob_3d_mapping_msgs cob_cam3d_throttle cob_image_flip cob_object_detection_msgs cob_object_detection_visualizer cob_perception_common cob_perception_msgs cob_vision_utils ipa_3d_fov_visualization |
Package Summary
| Tags | No category tags. |
| Version | 0.6.20 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ipa320/cob_perception_common.git |
| VCS Type | git |
| VCS Version | indigo_dev |
| Last Updated | 2024-02-19 |
| Dev Status | END-OF-LIFE |
| CI status | Continuous Integration : 0 / 0 |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
The ipa_3d_fov_visualization package allows to visualize the field-of-view of a camera.
Additional Links
No additional links.
Maintainers
- Florenz Graf
Authors
- Florenz Graf
ipa_3d_fov_visualization
This package visualizes the field of view (FOV) form stereo cameras using the pinhole model.
Requirements:
- System with Ubuntu and ROS http://wiki.ros.org (testet with ROS-Kinetic)
- Stereo Camera (testet with Intel RealSense D435)
Usage:
- Adapt ROS-Topics of the Camera Info in launch-File. e.g.
<remap from="camera_info" to="camera/color/camera_info"/> - Set Parameters in launch file
- How to start?
roslaunch ipa_3d_fov_visualization ipa_3d_fov_visualization.launch
Developers:
To change the line width, color and transparency please go to cpp-File, line 71-74
CHANGELOG
Changelog for package ipa_3d_fov_visualization
0.6.20 (2024-02-19)
0.6.19 (2022-07-29)
0.6.18 (2021-05-10)
- Merge pull request #104 from fmessmer/fix_catkin_lint fix catkin_lint
- fix catkin_lint
- Contributors: Felix Messmer, fmessmer
0.6.17 (2020-10-14)
0.6.16 (2020-10-10)
- Merge pull request #101 from fmessmer/test_noetic test noetic
- Bump CMake version to avoid CMP0048 warning
- Contributors: Felix Messmer, fmessmer
0.6.15 (2020-03-18)
- Merge pull request #99 from fmessmer/ci_updates [travis] ci updates
- catkin_lint fixes
- Contributors: Felix Messmer, fmessmer
0.6.14 (2019-08-06)
0.6.13 (2019-03-14)
- added feature 3d fov visualization
(#91)
- added feature 3d fov visualization
- removed modification
- fixed PR errors from fmesser
- updated PR issues
- fixed tab
- fixed PR requrest
- Update object_detection_visualizer_node.cpp
- changed license
- Contributors: Florenz Graf
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
System Dependencies
No direct system dependencies.
Dependant Packages
No known dependants.
Launch files
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.