No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
mpc_planner_jackalsimulator package from mpc_planner repompc_planner mpc_planner_jackal mpc_planner_jackalsimulator mpc_planner_modules mpc_planner_msgs mpc_planner_rosnavigation mpc_planner_solver mpc_planner_types mpc_planner_util |
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | An MPC Motion Planner in ROS/C++ |
| Checkout URI | https://github.com/tud-amr/mpc_planner.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-30 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
MPC Package ROS Wrapper for simultating the Clearpath Jackal
Additional Links
No additional links.
Maintainers
- Oscar de Groot
Authors
No additional authors.
Jackal Simulator
This package implements motion planning on the Clearpath Jackal in simulation.
Pedestrians are simulated with pedestrian_simulator that builds on top of libpedsim to implement the social forces pedestrian model.
The pedestrian scenario can be selected in the launch file. See pedestrian_simulator/scenarios/ for available options. The reference path that the robot should follow is also configured in the launch file. See roadmap/roadmap/maps/.

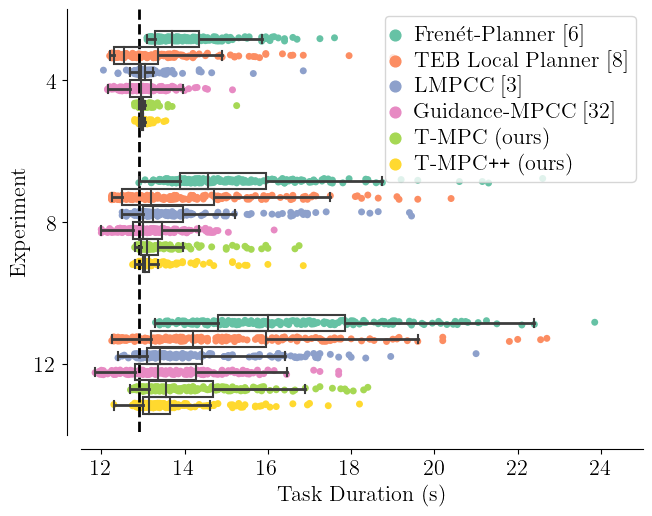
Comparitive results on this corridor baseline with 4, 8 and 12 pedestrians shows that T-MPC++ can outperform non-parallelized MPC (LMPCC) as well as other planners.
CHANGELOG
No CHANGELOG found.
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| pedestrian_simulator | |
| jackal_gazebo | |
| mobile_robot_state_publisher | |
| roadmap | |
| roscpp | |
| mpc_planner | |
| mpc_planner_msgs | |
| mpc_planner_modules | |
| mpc_planner_solver | |
| mpc_planner_util | |
| mpc_planner_types | |
| ros_tools | |
| dynamic_reconfigure | |
| tf2_ros | |
| nav_msgs |
System Dependencies
No direct system dependencies.
Dependant Packages
No known dependants.
Launch files
- launch/ros1_jackalsimulator.launch
-
- gui [default: false]
- project_name [default: ]
- pedestrian_scenario [default: open_space/24.xml]
- launch/ros2_jackalsimulator.launch
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged mpc_planner_jackalsimulator at Robotics Stack Exchange
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.