No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
myactuator_rmd_bringup package from myactuator_rmd_ros repomyactuator_rmd_bringup myactuator_rmd_description myactuator_rmd_hardware myactuator_rmd_ros |
Package Summary
| Tags | No category tags. |
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS 2 integration for MyActuator RMD-X series actuators |
| Checkout URI | https://github.com/2b-t/myactuator_rmd_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-01-10 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | robotics description urdf rmd xacro actuator ros2 urdf-models x8 xacro-urdf rmd-x8 myactuator |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Launch files and run-time configurations for MyActuator RMD-X-series actuators
Additional Links
No additional links.
Maintainers
- Tobit Flatscher
Authors
No additional authors.
MyActuator RMD X-series Bring-up
Author: Tobit Flatscher (2024)
![]()
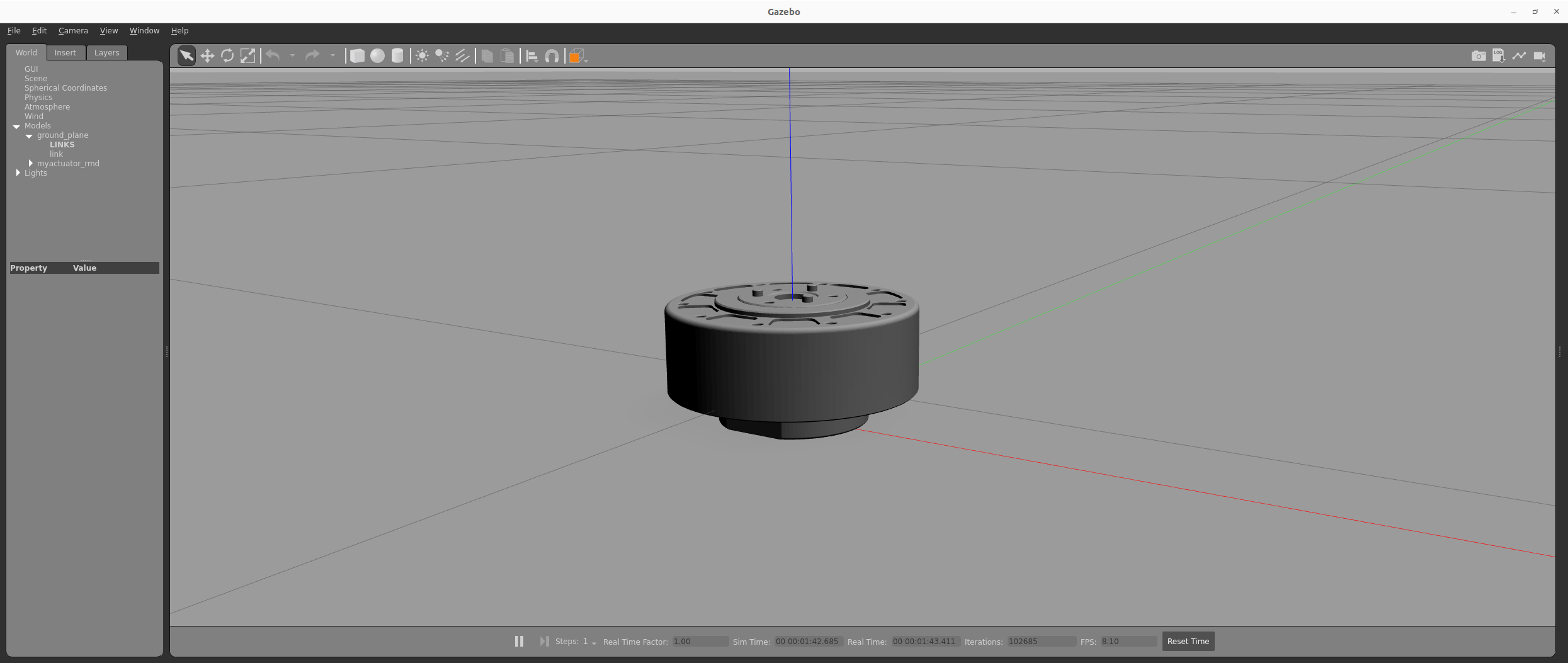
Overview
This package contains the ROS 2 bring-up and configuration files for the MyActuator RMD X-series actuators.
For launching the actuator in simulation with ros2_control simply launch the following launch file specifying the actuator:
$ ros2 launch myactuator_rmd_bringup myactuator_rmd_control.launch.py actuator:=X8ProV2 simulation:=true
Additionally to RViz and Gazebo this should open up a GUI for the controller manager as well as another GUI for the joint trajectory controller. In the latter you can activate the joint_trajectory_controller and move the actuator with it.
Alternatively you can switch to the effort, position or velocity controller with the controller manager GUI and publish set-points either to the /effort_controller/commands, /position_controller/commands or /velocity_controller/commands topic with:
$ ros2 topic pub /effort_controller/commands std_msgs/msg/Float64MultiArray "{data: [0.5]}"
CHANGELOG
No CHANGELOG found.
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
| Name | Deps |
|---|---|
| myactuator_rmd_ros |
Launch files
No launch files found
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged myactuator_rmd_bringup at Robotics Stack Exchange
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.