No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
apriltag_localization repositoryopencv gazebo-simulator ros-melodic apriltag-ros bluefox2 apriltag apriltag_localization_simulations apriltag_ros bluefox2 camera_base camera_calibration depth_image_proc image_pipeline image_proc image_publisher image_rotate image_view stereo_image_proc |
|
|
Repository Summary
| Description | Using apriltag & apriltag_ros & bluefox2 & OpenCV & VISP. |
| Checkout URI | https://github.com/lifuguan/apriltag_localization.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-20 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | opencv gazebo-simulator ros-melodic apriltag-ros bluefox2 |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| apriltag | 3.1.1 |
| apriltag_localization_simulations | 0.0.0 |
| apriltag_ros | 3.1.0 |
| bluefox2 | 0.2.0 |
| camera_base | 0.0.2 |
| camera_calibration | 1.13.0 |
| depth_image_proc | 1.13.0 |
| image_pipeline | 1.13.0 |
| image_proc | 1.13.0 |
| image_publisher | 1.13.0 |
| image_rotate | 1.13.0 |
| image_view | 1.13.0 |
| stereo_image_proc | 1.13.0 |
README
AprilTag_Localization
| Author | lifuguan |
|---|---|
| 1002732355@qq.com |
目录
- 基于AprilTag的ROS定位系统(摄像头型号 :mvBlueFOX-MLC200wc)
- 直接通过apriltag+OpenCV(使用mp4或者其他USB摄像头)
- Gazebo仿真环境下的Aprilag目标跟随
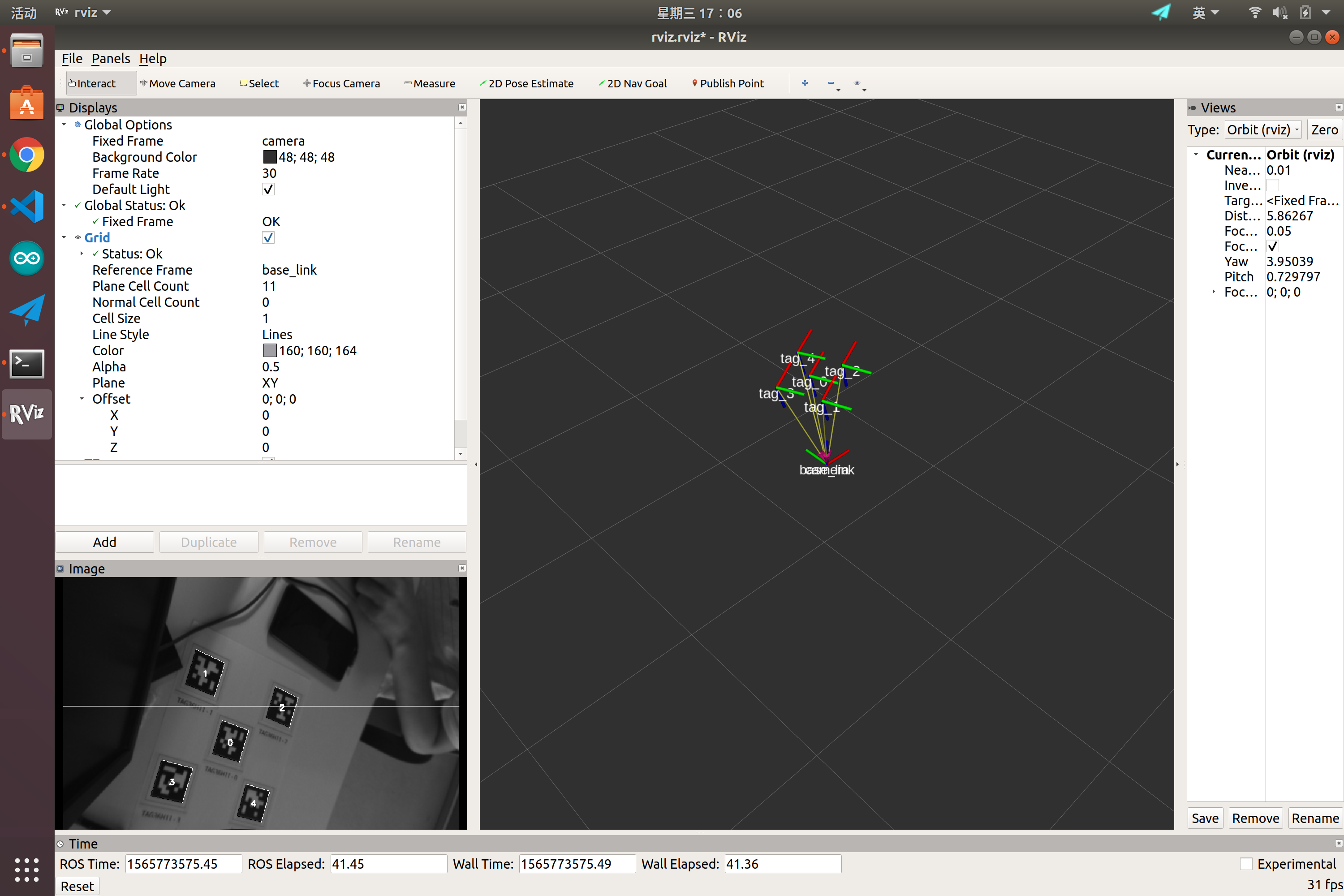
基于AprilTag的ROS定位系统(摄像头型号:mvBlueFOX-MLC200wc)
!此摄像头不通用于普通USB摄像头(必须通过调用自带的SDK)
- SDK地址,敬请食用
- 无法使用OpenCV中的
VideoCapture cap(0);读取cam的信息 - 无法使用ROS的usb_cam等常用包进行读取
ROS调用简介
bluefox2
驱动摄像头,笔者的cam ID为 : /mv_26806946
image_proc
代入标定数据矫正frame : /cam_id/image_raw –> /cam_id/image_rect
apriltag_ros
识别在/config/tags.yml里标记了的tag

使用方式(假设已经安装成功)
方法一
使用集成了的launch文件
roslaunch apriltag_ros my_continuous_detection.launch
注意
需要自行修改arg中的camera_name
方法二
roslaunch bluefox2 single_node.launchROS_NAMESPACE= your_cam_id rosrun image_proc image_procroslaunch apriltag_ros continuous_detection.launch
直接通过apriltag+OpenCV(使用mp4或者其他USB摄像头)
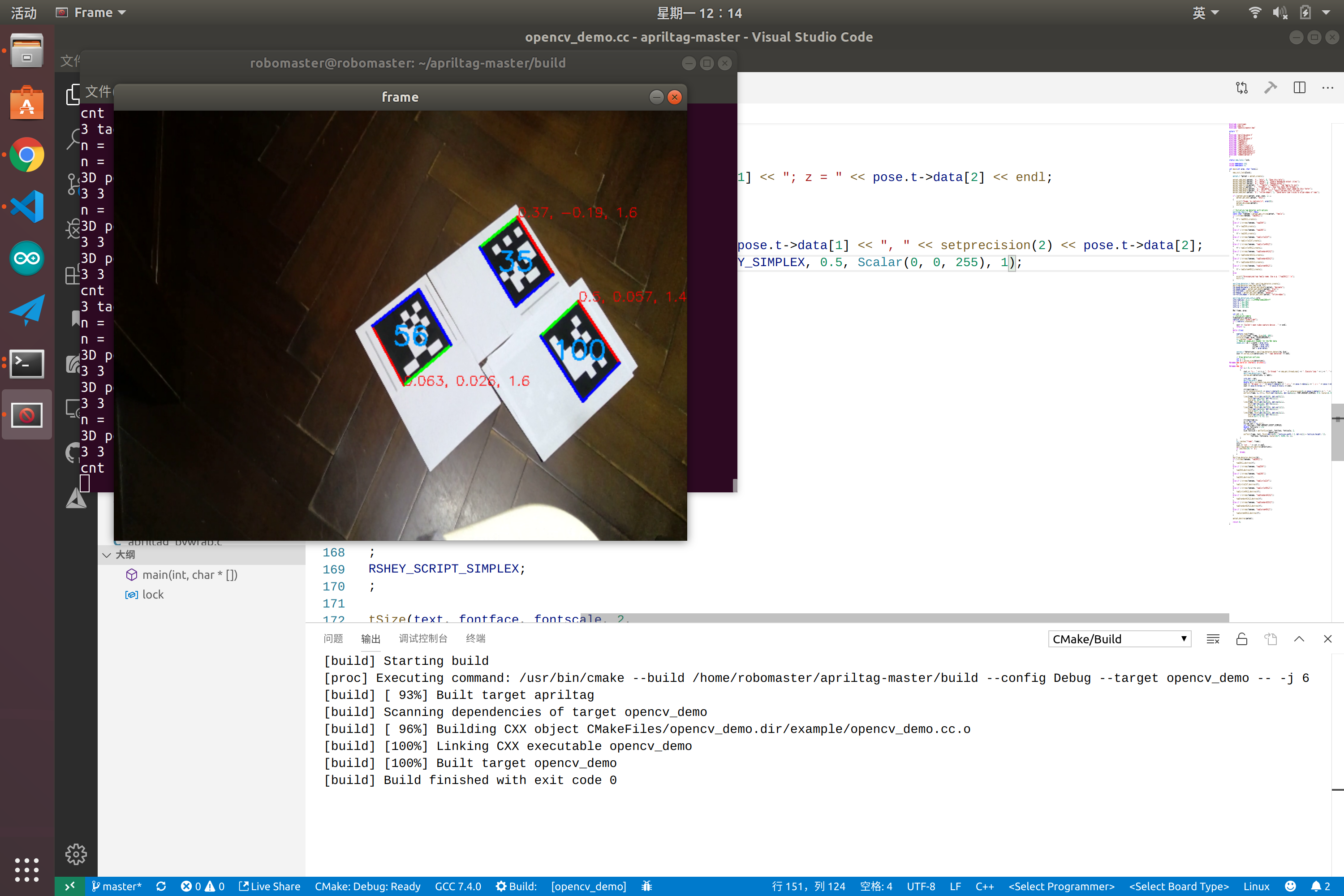
源码地址 opencv_demo.cc
使用方式
cmake .
sudo make install
opencv_demo
相对于官方的修改
-
增加openmp多线程处理 (此处修改了CMakeLists.txt)
-
加入pose_estimation
-
默认取消debug模式
Gazebo仿真环境下的Aprilag目标跟随
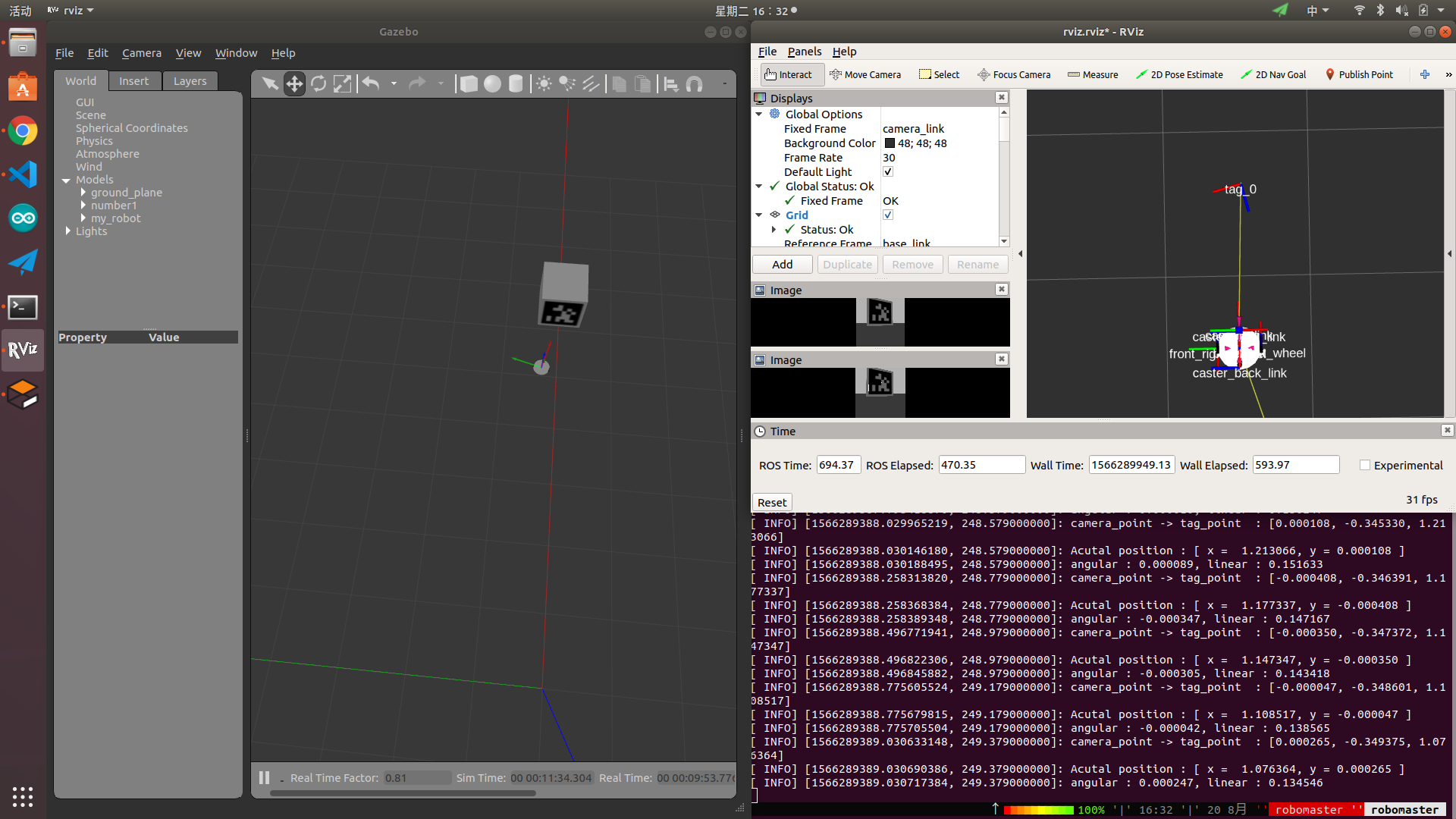
- 包名称
apriltag_localization_simulations - 使用模型
car.urdf
使用步骤
roslaunch apriltag_localization_simulation gazebo_detect_simulation.launch
rosrun apriltag_localization_simulation tag_tf_listener.cpp
tag_tf_listener.cpp
监听 /tag_0 与 /camera 之间的relative position,并转化成cmd_vel广播出去
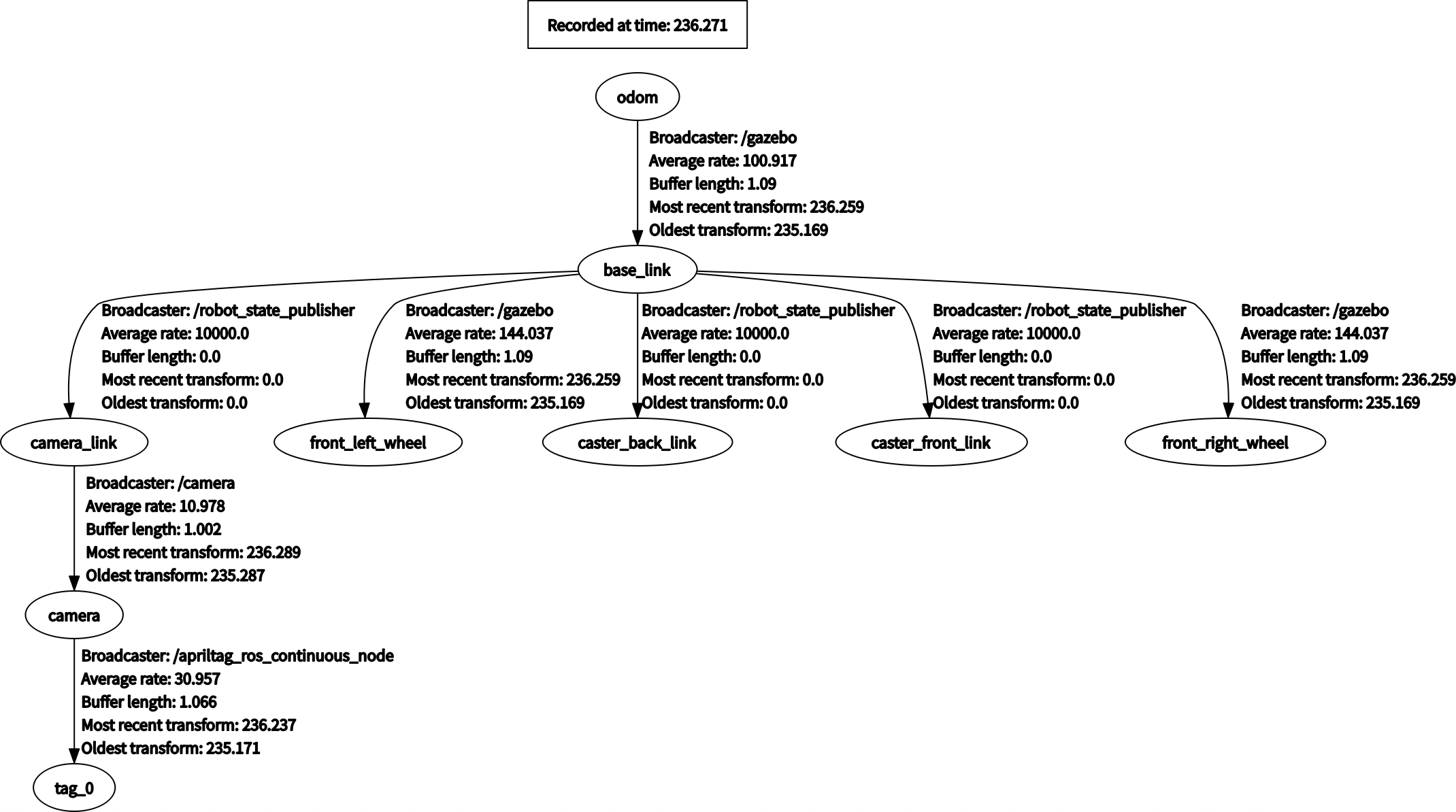
car.urdf
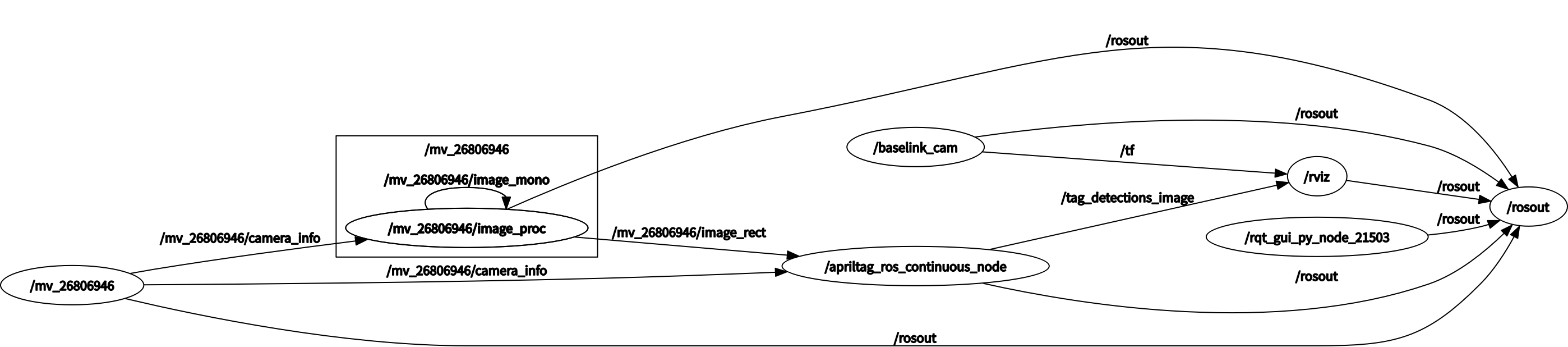
tf树
CONTRIBUTING
No CONTRIBUTING.md found.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.