
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble arduinobot_bringup arduinobot_controller arduinobot_cpp_examples arduinobot_description arduinobot_firmware arduinobot_moveit arduinobot_msgs arduinobot_py_examples arduinobot_remote arduinobot_utils |
|
|
Repository Summary
| Description | Arduinobot is an open-source 3D printed robot arm powered by ROS 2. Its simple design and low cost make it an excellent learning tool, featured in the "Robotics and ROS 2 - Learn by Doing! Manipulators" course. |
| Checkout URI | https://github.com/antobrandi/arduino-bot.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-18 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | python raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| arduinobot_bringup | 0.0.0 |
| arduinobot_controller | 0.0.0 |
| arduinobot_cpp_examples | 0.0.0 |
| arduinobot_description | 0.0.0 |
| arduinobot_firmware | 0.0.0 |
| arduinobot_moveit | 0.0.0 |
| arduinobot_msgs | 0.0.0 |
| arduinobot_py_examples | 0.0.0 |
| arduinobot_remote | 0.0.0 |
| arduinobot_utils | 0.0.0 |
README
![]()
![]()
![]()
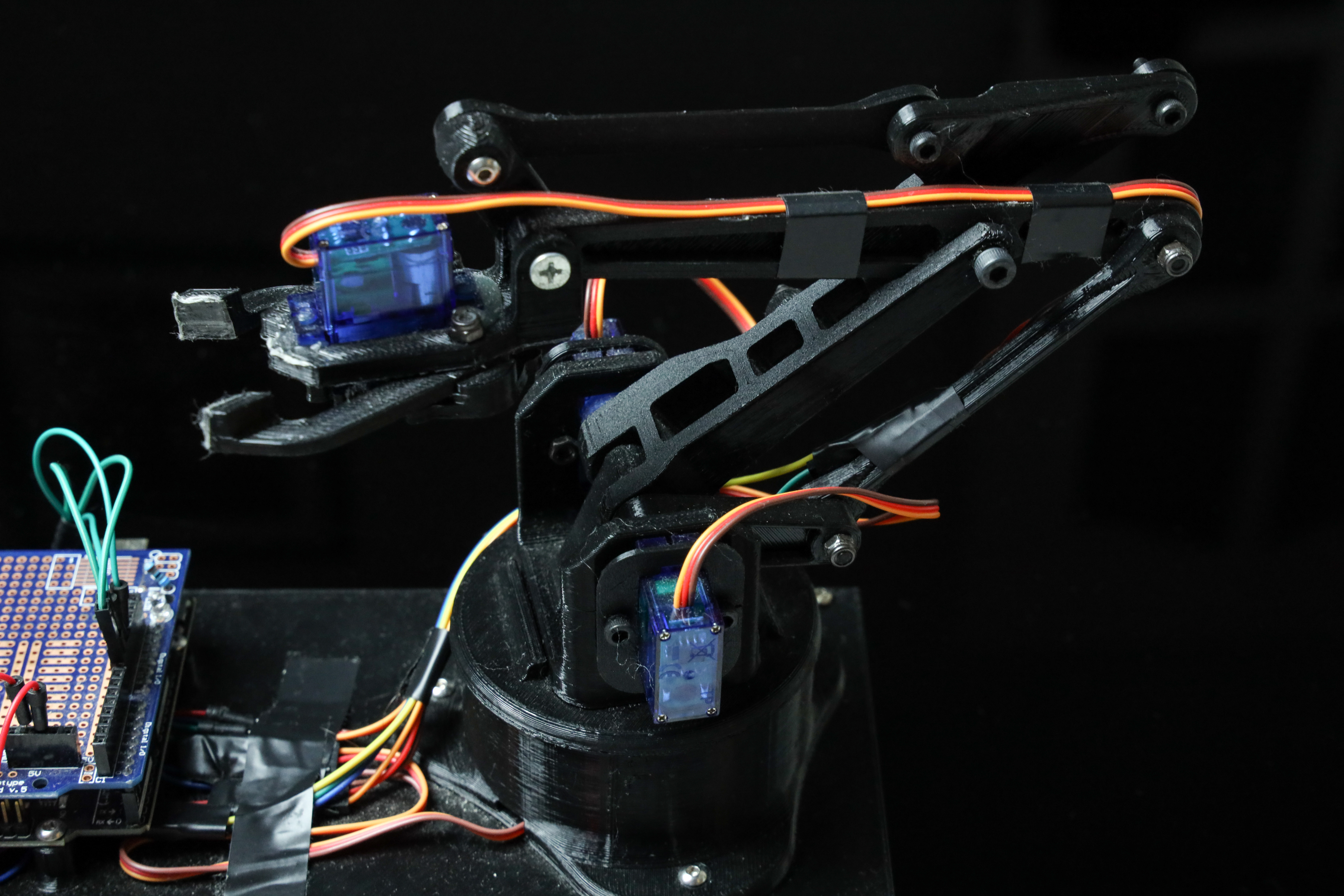
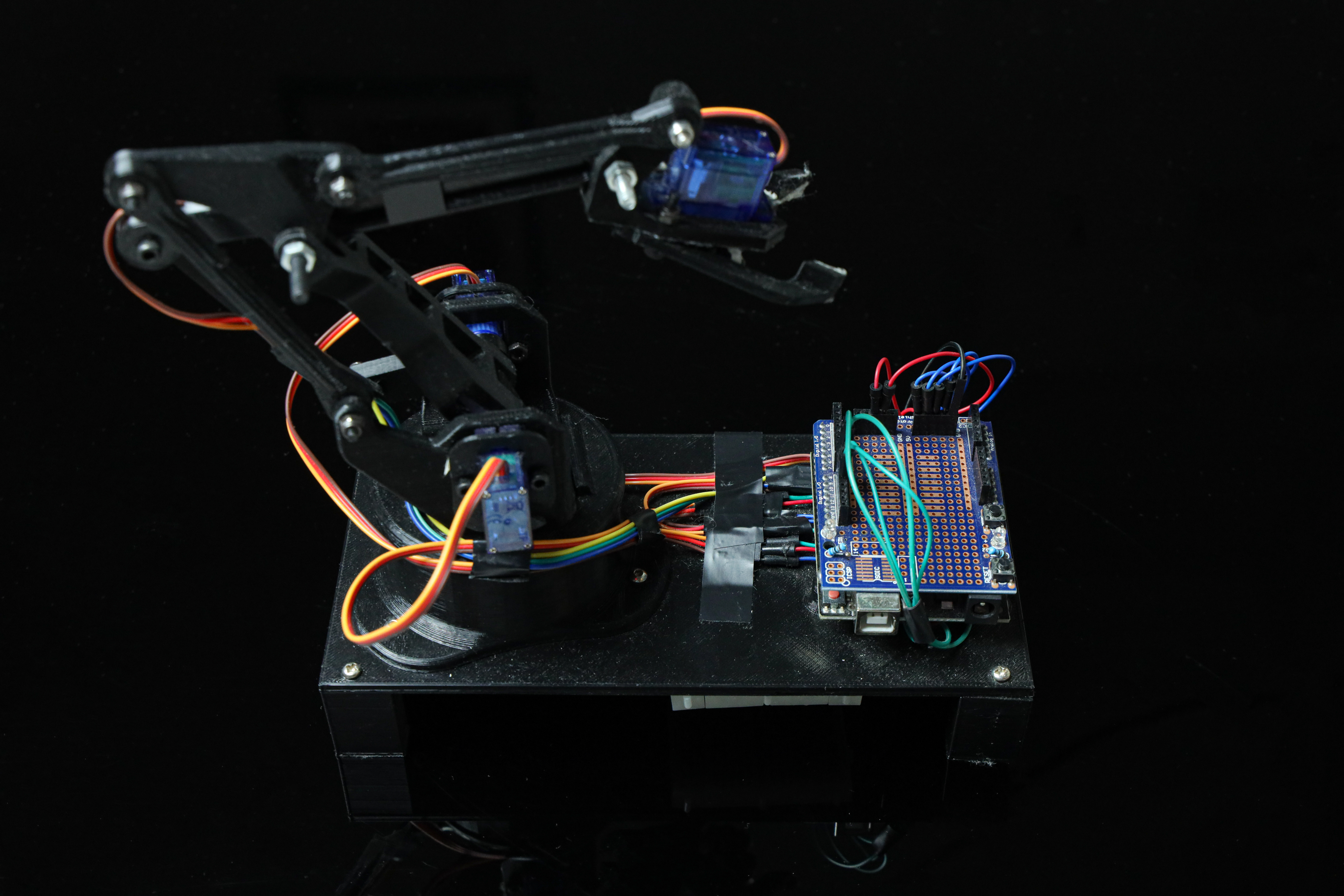
Arduinobot is an open-source 3D printed robot arm powered by ROS 2. Its simple design and low cost make it an excellent learning tool, featured in the Robotics and ROS 2 - Learn by Doing! Manipulators course.
:robot: Features
- :rocket:
arduinobot_bringup: Contains launch files that starts all the functionalities of the real or simulated robot. - :video_game:
arduinobot_controller: Contains the ROS 2 Control configuration and Hardware interface with the real robot. - :paperclip:
arduinobot_cpp_examples: Contains ROS 2 templates for developing with C++. - :ledger:
arduinobot_description: Contains the URDF description of the robot and its Gazebo simulation. - :battery:
arduinobot_firmware: Contains the Arduino code for actuating the motors of the real robot. - :brain:
arduinobot_moveit: Contains the MoveIt 2 configuration and launch files. - :email:
arduinobot_msgs: Contains the definition of new ROS 2 message interfaces. - :paperclip:
arduinobot_py_examples: Contains ROS 2 templates for developing with Python. - :speaking_head:
arduinobot_remote: Contains the remote interface to move the robot using the Amazon Alexa voice assistant. - :hammer_and_pick:
arduinobot_utils: Contains some utilities and tools.
:building_construction: Usage
This robot and its simulation can be used with an Ubuntu 22.04 machine running ROS 2 Humble or and Ubuntu 24.04 machine running ROS 2 Jazzy.
Prerequisites
- Install Ubuntu 24.04 or Ubuntu 22.04 on your PC or in a Virtual Machine.
- Install ROS 2 Jazzy if you are on Ubuntu 24.04. Otherwise, install ROS 2 Humble if you are on Ubuntu 22.04
- Install ROS 2 missing libraries. Some libraries that are used in this project are not in the standard ROS 2 package. Install them with:
- Install VS Code and Arduino IDE on your PC in order to build and load the Arduino code on the device
- Install Python and C++ addistional libraries
sudo apt-get update && sudo apt-get install -y \
libserial-dev \
python3-pip
pip install pyserial
pip install flask
pip install flask-ask-sdk
pip install ask-sdk
Installation
- Create a Workspace
mkdir -p arduinobot/src
- Clone this repo
cd arduinobot_ws/src
git clone https://github.com/AntoBrandi/arduinobot.git
- Install the dependencies
cd ..
rosdep install --from-paths src --ignore-src -i -y
- Build the workspace
colcon build
- Source the ROS Workspace (Use this command in a separate terminal from the one you used to build the workspace)
. install/setup.bash
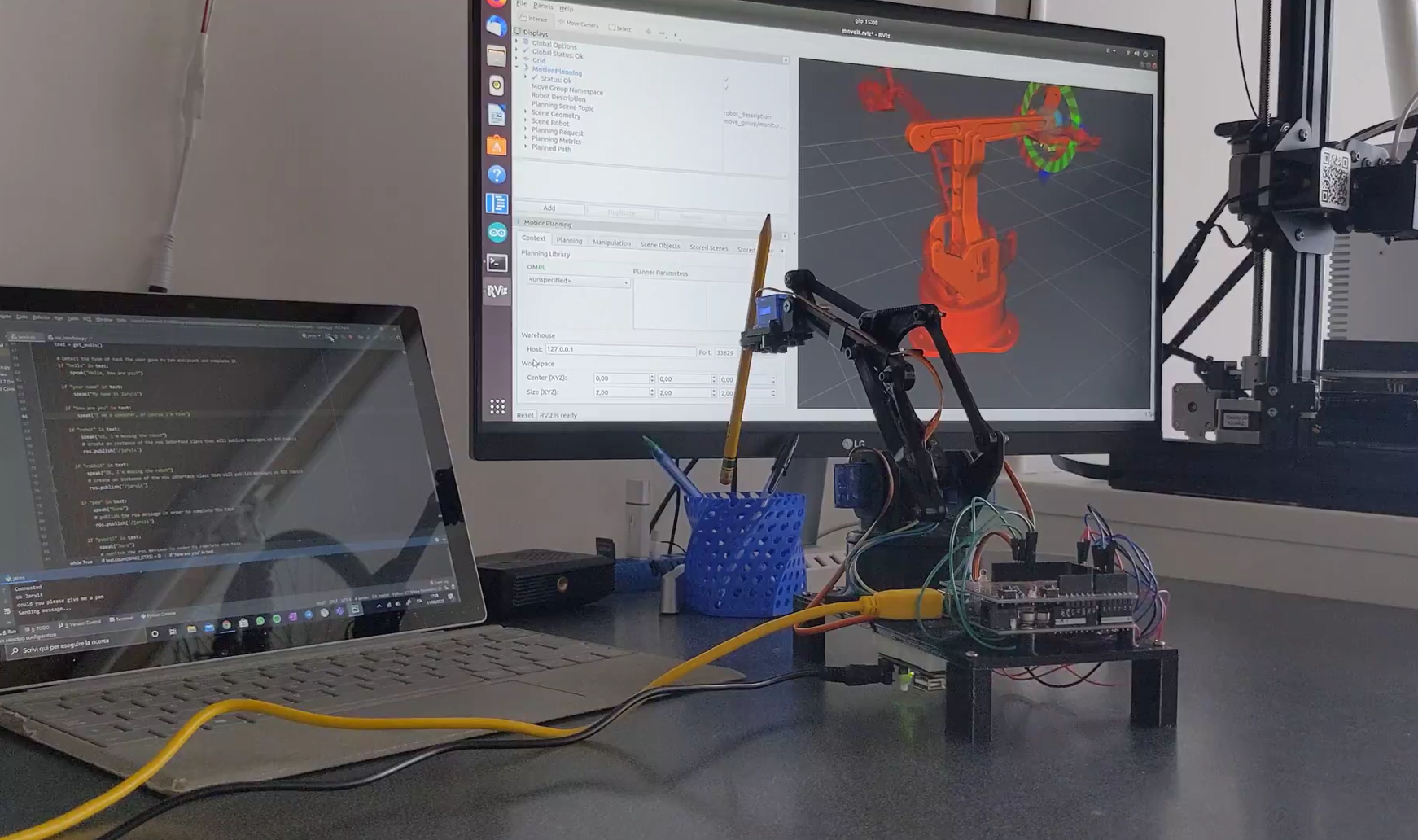
:computer: Simulation
- Launch all the functionalities for the simulated robot
ros2 launch arduinobot_bringup simulated_robot.launch.py
:mechanical_arm: Real Robot
-
Connect the Arduino actuating your robot to your PC and load the robot_control.ino script using the Arduino IDE.
-
Launch all the functionalities for the real robot
ros2 launch arduinobot_bringup real_robot.launch.py
:selfie: Media
https://github.com/user-attachments/assets/74157eb4-2f9c-4c7f-95d8-00c09da898f3
:raised_hands: Contributing
Contributions are what make the open source community such an amazing place to be learn, inspire, and create. Any contributions you make are greatly appreciated. Please refer to CONTRIBUTING doc.
:star2: Acknowledgements
:link: Contact
Antonio Brandi - LinkedIn - antonio.brandi@outlook.it
Other Projects: https://github.com/AntoBrandi
CONTRIBUTING
Contributing
Contributing to Arduinobot
The following is a set of guidelines for contributing to Arduinobot project. These are mostly guidelines, not rules. Use your best judgment, and feel free to propose changes to this document in a pull request.
Code of Conduct
This project and everyone participating in it is governed by the CODE OF CONDUCT. By participating, you are expected to uphold this code.
How to Contribute
Reporting Bugs
Before Submitting a Bug Report
- Determine the repository which should receive the problem.
- Search the repository’s issues to see if the same or similar problem has been opened. If it has and the issue is still open, then add a comment to the existing issue. Otherwise, create a new issue.
How to Submit a Good Bug Report
Create an issue on the repository that is related to your bug, explain the problem, and include additional details to help maintainers reproduce the problem. Refer to the `Short, Self Contained, Correct (Compilable), Example Guide as well as the following tips:
- Use a clear and descriptive title for the issue to identify the problem.
- Describe the exact steps which reproduce the problem in as many details as possible. When listing steps, don’t just say what you did, but explain how you did it.
- Provide specific examples to demonstrate the steps. Include links to files or projects, or copy/pasteable snippets, which you use in those examples.
- Describe the behavior you observed after following the steps and point out what exactly is the problem with that behavior.
- Explain which behavior you expected to see instead and why.
- Include screenshots and animated GIFs which show you following the described steps and clearly demonstrate the problem.
- If the problem wasn’t triggered by a specific action, describe what you were doing before the problem happened and share more information using the guidelines below.
Provide more context by answering these questions:
- Did the problem start happening recently (e.g. after updating to a new version) or was this always a problem?
- If the problem started happening recently, can you reproduce the problem in an older version? What’s the most recent version in which the problem doesn’t happen?
- Can you reliably reproduce the issue? If not, provide details about how often the problem happens and under which conditions it normally happens.
Include details about your configuration and environment:
- Which version of Arduinobot are you using??
- What’s the name and version of the OS you’re using?
- Are you running Arduinobot using the provided docker container? See docker.
- Are you running Arduinobot in a virtual machine? If so, which VM software are you using and which operating systems and versions are used for the host and the guest?
Suggesting Enhancements
This section guides you through submitting an enhancement suggestion, including completely new features and minor improvements to existing functionality. Following these guidelines helps maintainers and the community understand your suggestion and find related suggestions.
Before creating enhancement suggestions, please check before-submitting-a-bug-report as you
might find out that you don’t need to create one. When you are creating an
enhancement suggestion, please include as many details as possible.
When filling in the issue form for an enhancement suggestion, include the
steps that you imagine you would take if the feature you’re requesting
existed.
Before Submitting An Enhancement Suggestion
- Check if you’re using the latest software version. A more recent version may contain your desired feature.
- Determine which repository the enhancement should be suggested in
- Perform a cursory search to see if the enhancement has already been suggested. If it has, add a comment to the existing issue instead of opening a new one.
How Do I Submit A (Good) Enhancement Suggestion
Enhancement suggestions are tracked as GitHub issues. After you’ve determined which repository your enhancement suggestion is related to, create an issue on that repository and provide the following information:
- Use a clear and descriptive title for the issue to identify the suggestion.
- Provide a step-by-step description of the suggested enhancement in as many details as possible.
- Provide specific examples to demonstrate the steps. Include copy/pasteable snippets which you use in those examples, as Markdown code blocks.
- Describe the current behavior and explain which behavior you expected to see instead and why.
- Include screenshots and animated GIFs which show you following the described steps and clearly demonstrate the problem.
- Explain why this enhancement would be useful to most users and isn’t something that can or should be implemented as a separate application.
- Specify which version of Arduinobot you’re using.
- Specify the name and version of the OS you’re using.
Contributing Code
We follow a development process designed to reduce errors, encourage collaboration, and make high quality code. Review the following to get acquainted with this development process.
#. Read the reporting_bugs and suggesting_enhancements sections first.
#. Fork the Arduinobot package you want to contribute to. This will create your own personal copy of the package. All of your development should take place in your fork.
- An important thing to do is create a remote pointing to the upstream remote repository. This way, you can always check for modifications on the original repository and always keep your fork repository up to date.
#. Work out of a new branch, one that is not a release / main branch. This is a good habit to get in, and will make your life easier.
#. Write your code. To remember:
- Look at the existing code and try to maintain the existing style and pattern as much as possible
- Always keep your branch updated with the original repository
Process
All Arduinobot team members actively:
- Watch all Arduinobot-related repositories to receive email notifications of new issues / pull requests
- Provide feedback to issues as soon as possible
-
Review pull requests as soon as possible
- Team members can review pull requests already under review or approved
- Team members can provide some feedback without doing a full review
Pull requests can be merged when:
- They have at least 1 approval from a member of the core team
- There are no unresolved comments
- CI is passing
-
Developer Certificate of Origin(DCO) check is passing
- DCO is a declaration of ownership, basically saying that you created the contribution and that it is suitable to be covered under an open source license (not proprietary).
- All you have to do is end your commit message with Signed-off-by: Your Full Name your.name@email.com
- If your user.name and user.email configurations are set up in git, then you can simply run git commit -s to have your signature automatically appended.
Merging strategy:
- For internal contributions, give the original author some time to hit the merge button themselves / check directly with them if it’s ok to merge.
- Default to “squash and merge”
- Review the pull request title and reword if necessary since this will be part of the commit message.
- Make sure the commit message concisely captures the core ideas of the pull request and contains all authors’ signatures.
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|
|
|
arduino-bot repositorypython raspberry-pi arduino alexa robot cpp robotics inverse-kinematics speech-recognition moveit gazebo alexa-skill 3d-printing voice-assistant ros2 moveit2 ros-2 ros2-control ros2-rolling ros2-humble |
|
|